Introduction
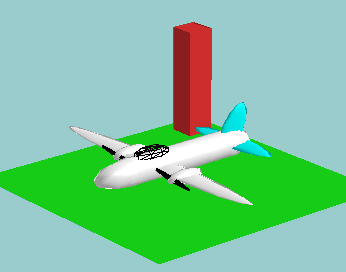
Designing models of objects is a central part of computer graphics. Quite often it is useful to simulate the physical structure of an obejct to simplifiy design and animation. An example might be an airplane in which the propellers rotate and the whole airplane undergoes rigid body motion as it takes off. It would be annoying to have to separately remember to move every part of the airplane, even though the airplane might be made up of dozens of geometric objects. More information can be found by searching the keywords: computer graphics hierarchical modeling. A few references are given at the end. The following paragraphs describe a system to produce simple models of objects then combine and animate them. The models are produced by two methods:
Programming model for Surfaces
The method used here is to package each geometric primitive (e.g. sphere) as
a Matlab 'struct'. Geometric primitives are then grouped in a 'cell array'.
The cell array is ultimately passed to the renderpatch function
for conversion to a shaded polygon image or the renderwire function
for conversion to a wireframe image.
Each geometric primitive struct may have several data fields. Each struct must
have a faces field and a vertices field in order to
be rendered. The vertices field of N vertices must be an Nx3 array.
The faces field of M faces must be an Mxf array, where f would be 3 for a triangle
list and 4 for a rectangle list. For example a struct called cube
could be defined as:
cube.vertices=[ 0 0 0; 1 0 0; 1 1 0; 0 1 0; ...
0 0 1; 1 0 1; 1 1 1; 0 1 1;];
cube.faces=[ 1 2 6 5; 2 3 7 6; 3 4 8 7; ...
4 1 5 8; 1 2 3 4; 5 6 7 8; ] ;
Of course, it would be tedious to have to figure out the faces for spheres and other objects, so a set of prototype objects is included below.
There are several optional fields which can be defined. The field names are
case-sensitive and must be all lower-case. If you do not specify a field value,
its default value is used. All fields can be used with the renderpatch
function. Only facecolor, edgecolor and visible may be used with renderwire.
In addition, renderwire maps the facecolor to the edgecolor.
For instance for the cube struct you might want to specify
cube.facelighting='flat'; %flat shading with no edge interp cube.facecolor=[.9,.2,.2]; %a red color
The renderers, renderpatch and renderwire expect
a cell array as a parameter. The cell array should contain all objects to be
rendered. The combine function described below concatenates objects
in the correct format for the renderers. See the example code below for specific
use.
The Matlab Code for Surfaces
The code is packaged as several Matlab functions so that is can be used in a natural fashion. The Matlab 'help' function will return information on each function.
count=renderpatch(scene);count=renderwire(scene);newobject=combine(obj1, obj2 , ...);scaledobj=scale(obj,xscale,yscale,zscale);movedobj=translate(obj,x,y,z);rotatedobj=rotateX(obj,angle);rotatedobj=rotateY(obj,angle);rotatedobj=rotateZ(obj,angle);sphere1=UnitSphere(3);cyl1=UnitCylinder(3);torus1=UnitTorus(radius,resolution)cube1=UnitCube;square1=UnitSquare;surface1=UnitSurface(10);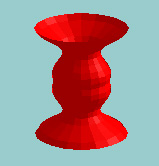
polyhedron=Polyhedra(type);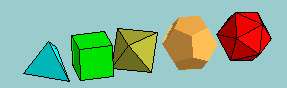
Examples using Surfaces
cyl = UnitCylinder(2);
L1 = 3;
L2 = 2;
L3 = 1;
radius = .3;
w1 = 5;
w2 = 10;
w3 = 30;
arm1 = translate(scale(cyl,radius,radius,L1/2),0,0,L1/2);
arm1.facecolor = 'blue';
arm2 = translate(scale(cyl,radius,radius,L2/2),0,0,L2/2);
arm2.facecolor = 'green';
arm3 = translate(scale(cyl,radius,radius,L3/2),0,0,L3/2);
arm3.facecolor = 'red';
angle1 = 0 ; angle2 = 0 ; angle3 = 0;
for i = 1:36
distal = combine(translate(rotateY(arm3,angle3),0,0,L2),arm2);
distal = rotateY(distal, angle2);
arm = combine(translate(distal,0,0,L1), arm1);
arm = rotateY(arm, angle1);
cla
renderpatch(arm);
camlight
box on
view(30,30)
drawnow
set(gca,'xlim',[-5 5],'ylim',[-5 5],'zlim',[-5 5])
angle1 = angle1 + w1 ;
angle2 = angle2 + w2 ;
angle3 = angle3 + w3 ;
end
clear all
% Hydrogen
H = UnitSphere(2);
H.facecolor = 'blue';
%Oxygen
Rox = 1.4;
Ox = scale(UnitSphere(2),Rox,Rox,Rox);
Ox.facecolor = 'red';
d = 1.4; %approx O-H distance
H1 = translate(H,d,0,0);
ang = 107; %bond angle
H2 = rotateY(H1,ang);
water = combine(Ox,H1,H2);
%approx Hydrogen bond distance
water2 = combine(water,translate(rotateX(water,-45),1,2,3));
%init 40 frames of a movie
mov = moviein(40);
framecount = 1;
figure(1); clf;
%draw the water and move the camera and make a movie
for i=0:.1:1.57
renderpatch(water2);
camlight
set(gca,'cameraposition',[20*cos(i),20*sin(i),0])
set(gca,'cameratarget',[1,1,1])
set(gca,'cameraupvector',[0 0 1])
set(gca,'cameraviewangle',30)
set(gca,'xlim',[-5 5],'ylim',[-5 5],'zlim',[-5 5])
box on
xlabel('x')
ylabel('y')
zlabel('z')
mov(framecount) = getframe(gcf);
framecount = framecount + 1;
end
figure(2); clf;
axis off
movie(mov,-5,15);
clear all;
clf;
sphere1=UnitSphere(2);
sphere1.facecolor='white';
cyl1=UnitCylinder(1);
cyl1=translate(scale(cyl1,.1,.1,.75),2.8,0,0);
cyl1.facelighting='flat';
cyl1.facecolor='yellow';
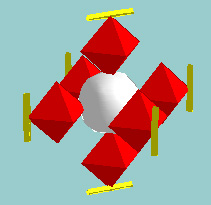
octa1=UnitSphere(1);
octa1.facecolor='red';
octa1.facelighting='flat';
octa1.specularstrength=.7;
octa1=translate(octa1,1.8,0,0);
%Animate
for time=0:.1:4
level2=combine(...
rotateX(octa1,time*90), ...
rotateX(cyl1, time*(-180)) );
level1=combine(...
level2, ...
rotateY(level2,90), ...
rotateY(level2,-90), ...
rotateY(level2,180), ...
rotateZ(level2,90), ...
rotateZ(level2,-90)...
);
base=rotateZ(combine(sphere1,level1),time*45);
clf
count=renderpatch(base);
axis off;
grid on
daspect([1 1 1])
light('position',[10,-10,10])
%Do a persptective transform
set(gca,'projection','perspective')
set(gca,'CameraViewAngle',6)
%The frame background color
set(gcf,'color', [.6,.8,.8])
xlabel('x');ylabel('y');zlabel('z');
view(-28,20)
drawnow;
end %for
rotate3d on
cockpit.facealpha=0.6
results in a transparent cockpit canopy.



Constructive Solid Geometry (CSG)
The CSG description used here is very simple and limited to fairly coarse volume representations of solids. The scheme is to represent each elementary solid, e.g. cube, as a 3D field of values, negative on the inside and positive outside. The CSG operations of union, intersection, and subtraction then become simple min/max operations on the 3D fields. After all CSG operations are complete, the volume representation is converted to surfaces.
Programming model for CSG
All volume-shapes are generated as 3D scalar fields. These fields may be subjected
to the usual CSG operations mentioned above. Since fields are really arrays,
all fields which are to be combined must have the same number of elements. The
'resolution' parameter associated with construction of CSG objects
sets the number of elements and thus must be the same for all CSG objects which
will be combined using CSG operations. After all CSG operations are performed,
the volume-object is converted to surfaces for rendering. The volume which is
modeled by the CSG operations is hardcoded to -1 to +1 on each axis. Objects
may be scaled after they are converted to surfaces. Objects may also have other
parameters, such as facecolor, set after they are converted to
surfaces. All objects are rendered using the routines described above.
You may use several distinct CSG objects in a scene. Each different object can have its own resolution.
Matlab code for CSG
As with surfaces, there are routines to build and modify CSG objects.
solidcube=CSGcube(xcenter, ycenter, zcenter, size, resolution);solidcyl=CSGcylinder(xcenter, ycenter, zcenter, radius, axis,resolution);solidsphere=CSGsphere(xcenter, ycenter, zcenter, radius,resolution);solidunion=CSGunion(Field1, Field2);solidintersect=CSGintersection(Field1, Field2);solidsubtract=CSGsubtract(Field1, Field2);surface=CSGtoSurface(field, resolution);Examples Using CSG objects
The following code produces a cup sitting on a simple table as shown below.
%build a cup sitting on a table
clear all
clf
res=15 ;
%build the cup body
%by making a closed-end cylinder
cyl1=CSGcylinder(0,0,0,.45,'z',res);
cube1=CSGcube(0,0,-.5,.5,res);
body=CSGintersection(cyl1,cube1);
%then subtracting another, smaller cylinder
cyl2=CSGcylinder(0,0,0,.35,'z',res);
cube2=CSGcube(0,0,-.4,.4,res);
hole=CSGintersection(cyl2,cube2);
body=CSGsubtract(body,hole);
%make the handle
s1=CSGsphere(.6,0,-.4,.3,res);
cyl3=CSGcylinder(.6,0,-.4,.15,'y',res);
handle=CSGsubtract(s1,cyl3);
%join handle and body to make the cup
cup=CSGunion(body,handle);
cupSurface=CSGtoSurface(cup,res);
cupSurface.facecolor='yellow';
%now make a place to set the cup
table=UnitCube;
table.facecolor=[1,.6,.6];
table.facelighting='flat';
table.edgecolor='red';
table=scale(table,1,1,.2);
table=translate(table,0,0,-1.2);
scene=combine(cupSurface, table);
count=renderpatch(scene)
axis off;
grid on
daspect([1 1 1])
light('position',[10,0,10])
%light('position',[10, 10, 10])
%Do a persptective transform
set(gca,'projection','perspective')
set(gca,'CameraViewAngle',8)
%The frame background color
set(gcf,'color', [.6,.8,.8])
xlabel('x');ylabel('y');zlabel('z');
view(7,20)
drawnow
rotate3d on
3D camera model
I started writing low level graphics code in Matlab a few years ago with the idea of using it in an introductory graphics course. The GUI and an associated function convert a 3D face list and vertex list into a 2D image. Put the GUI and associated funciton in the same folder and run the GUI.

References
Computer Graphics: Principles and Practice in C, James D Foley