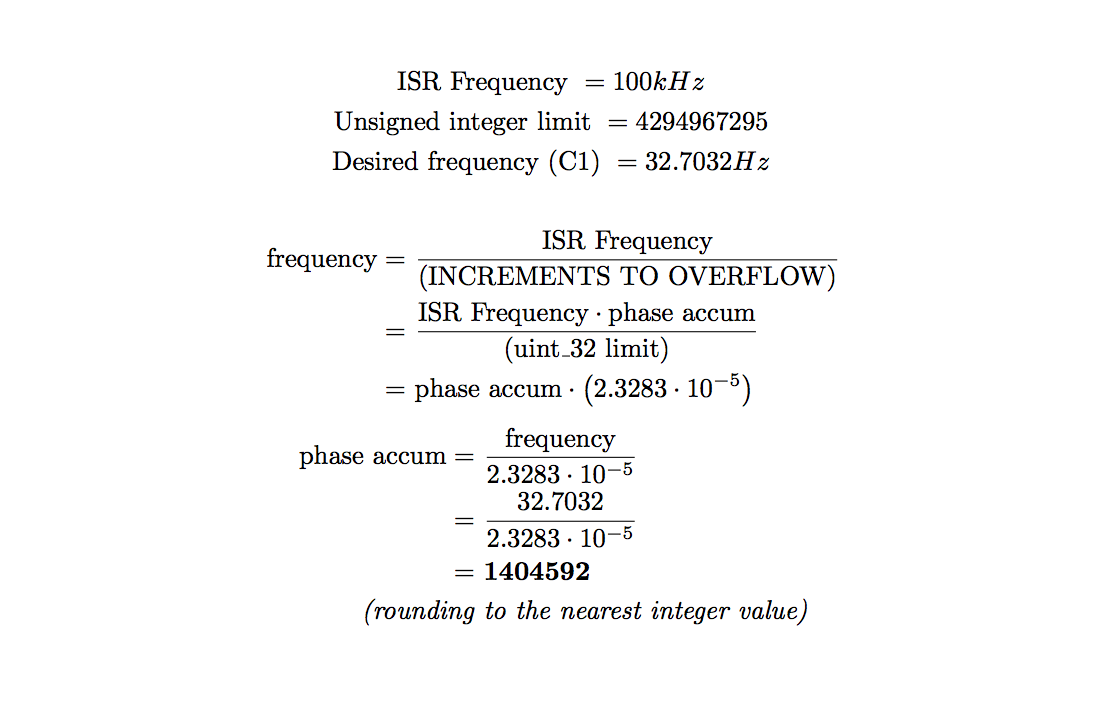
In our software, there are dozens of variables that refer to different synthesis
parameters. Two char arrays, step_notes and steps_on, represent the note and
activity (rest or note) of each step in the 16-step sequence. In step_notes, a
note is represented by an index, 0-48, into a table of phase accumulators,
calculated using freq_accum_calcs.rb, which can be found in the
Commented Program Files section.
The old_step_select, step_select, note_select, old_step, and curr_step variables
are used for sequence editing and playback, both to supply the TFT-update thread
with information it needs to draw the sequence state, and to facilitate reading
and writing data to/from the two sequence arrays mentioned above. The seq_active
variable is used in the DDS ISR to determine whether or not to add the sequence
advancing phase accumulator to the step_accum counter. The phase accumulators for
each tempo were calculated using tempo_accum_calcs.rb, which can be found in the
Commented Program Files section.
There are many flags, accumulators, and values that go into making the amplitude
and shape blend envelopes work. The amp_env, shape_env, and shape_amt variables
hold the values for the modal envelopes, and the attenuation amount for the shape
envelope respectively, all set directly from the ADC reading thread. The rising
variables are used as flags in the DDS ISR to determine whether to add or subtract
the accumulator. The rise_acc and fall_acc variables for both envelopes are set
using envelope rise/fall phase accumulators calculated in env_bound_accum_calcs.rb,
which can be found in the
Commented Program Files section. These accumulators are
blended across the turn of the modal envelope knobs, allowing fades through
different envelope lengths and shapes.
Both envelopes are AD envelopes. At the left side of the knob, the envelope has
a short attack and long decay. As the knob moves towards the center of its turn,
the decay becomes longer until a certain keyframe, at which point the attack
starts lengthening, making the envelope's shape more triangular. After this
keyframe, the attack continues to become longer as the decay shortens, eventually
resulting in shapes inverse to those on the left side of the knob, in which the
attack is long but the decay is very short. The specific time values of each
envelope keyframe are listed in comments in env_bound_accum_calcs.rb.
Our DDS ISR (Direct Digital Synthesis Interrupt Service Routine) accomplishes
all the tasks it needs to very expediently. This is necessary because of the speed
at which it is run: 100kHz. In these 400 cycles, with cycles to spare for other
threads like the button, multiplexer, or TFT threads, the procedures executed
are as follows:
-
Scaling the shape envelope value by its attenuation, then adding it
to the wave blend offset and clipping the result if it is too high
-
Getting the two waves within the current wavetable to use in the
WAVE_BLEND macro, using bitwise operations on the overall blend
value
-
Using the WAVE_BLEND macro to blend between the two waves, using
the subtable blend value, the above-calculated table offsets, and
the DDS phase accumulator
-
Scaling the calculated sample by the value of the amplitude envelope,
then writing this sample to the DAC
-
Updating the DDS phase accumulator and sequence position
-
Updating the envelopes' values, taking into account each envelope's
rising flags and rise/fall phase accumulators, clipping results if
necessary
-
Setting step update flag for TFT thread if the sequencer step changed,
so that the UI can reflect this change
Using integer operations instead of fix16 operations, as well as choosing scaling
values to allow division using variable right shift, allowed the DDS ISR to function
properly in the small window of time it was allowed.
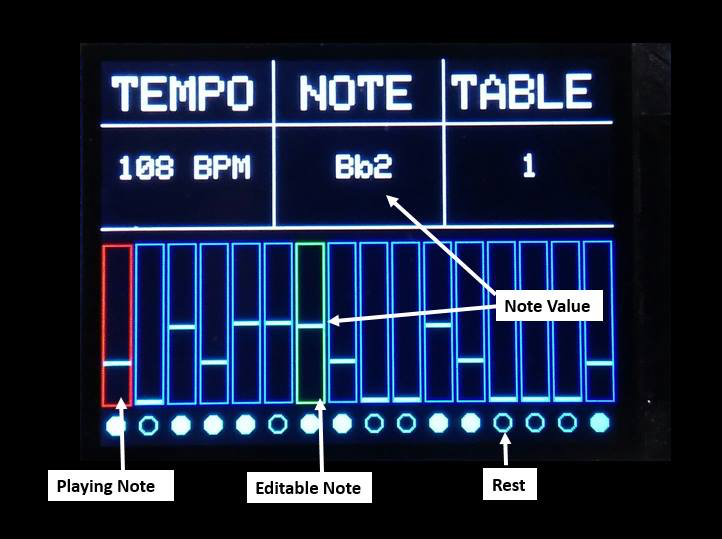
The intitial sequence state, as well as the general UI format, is drawn to the TFT
using the helper function initTFT(), which is called from main. After this point,
once threads have been scheduled and the program is fully started, the TFT is
updated 20 times per second, using a dedicated TFT update thread.
In the TFT update thread, flags set in the ISR and the other threads allow for
updating the sequence state only when necessary. Only steps which have changed
will be redrawn, and the red/green selector boxes for selected and active
sequence steps will only be moved if their positions have been changed. Copies
of all flags which are set in the ISR, such as the old and current step, are
made in the TFT update thread to ensure that their values don't change in between
dependent drawing steps. The tempo, note-to-write, and table index are all
rewritten each time the TFT update thread's loop executes.
User Interface on the TFT Display
The multiplexing of input through the 1 on-board ADC was done in a dedicated
thread. In this thread, all 7 potentiometer values were read into their respective
variables, with any data manipulations needed done as well (such as converting
raw envelope positions into rise/fall accumulators). The 3 control bits for the
multiplexer had to be switched before each read, after which a couple short waits
(implemented using an empty while loop) was required before reading the ADC value.
Overall, the procedure for each of the 7 reads was largely identical and was as
follows:
-
Set BIT_7, BIT_8, and BIT_9 on IOPORT_B to represent the index of the
multiplexer input in binary, from 0-7
-
Wait for approximately 80 cycles
-
Acquire the ADC (would not have been needed if auto-capture were on)
using the AcquireADC10() function
-
Wait for approximately 40 more cycles
-
Set old value variables if needed, then read the new value using
ReadADC10(0) and process the read value quickly
The four buttons were processed using a thread which was run at
approximately 10Hz. Because of the slow rate of button value capture,
we deemed it unnecessary to debounce the buttons. The button thread was,
as a result, rather simple. For each button, the previous value of the
button was stored. If the newly-read value of the button from its digital
input pin was different from the previous value, and this new value signified
that the button was being pressed, the data the button controlled would
be modified. When writing a new note value, or changing a step's rest
state, the button thread would set some flags for the TFT thread to notify
it about which step had been changed, allowing the TFT thread to do less
work.
All of our wavetables were initially designed custom in the VST Plugin
Serum
by Xfer Records, an advanced wavetable synthesizer with a built-in
wavetable creation tool. After these wavetables were created, the .wav files
that represented them were converted to 32-bit signed .raw files using
the free audio software, Audacity. The wavetables in Serum initially
were represented as 32-bit float, with 512 samples per table. Using
8 waves per table, as we did, this meant that each wavetable had 4096
32-bit samples, resulting in around 16KB per table.
After being converted into .raw format, each wavetable was converted
into a C header file using a custom command-line script, convert.cpp,
which can be found in the
Commented Program Files section. It allows the user to specify the
name of the array in which the samples will be placed. We used these
array names later in our int *tables array, which contained the four
wavetables. The header files containing the wavetables were rather large,
and as such have not been included in this report.
We decided to use unsigned integers to hold all of our synthesis parameters,
even ones that would have to be scaled by others. We made this choice mainly
to achive speed in the DDS ISR, for better audio fidelity via a higher sample
rate and more time for threads to perform their respective tasks. The barrel
shift allowed by the PIC32's ALU made division before scaling very fast, which
came in handy for crossfading between waveshapes, fading between envelope
keyframes, scaling shape modulation, and scaling the DDS sample by the
amplitude envelope.
The DAC and ADC were configured using code modified from examples on the
course website. We put most of our configuration code in two functions,
initADC and initDAC, which were both called from the main procedure of our
program. We also used some macros for the bitwise ORs of configuration flags.
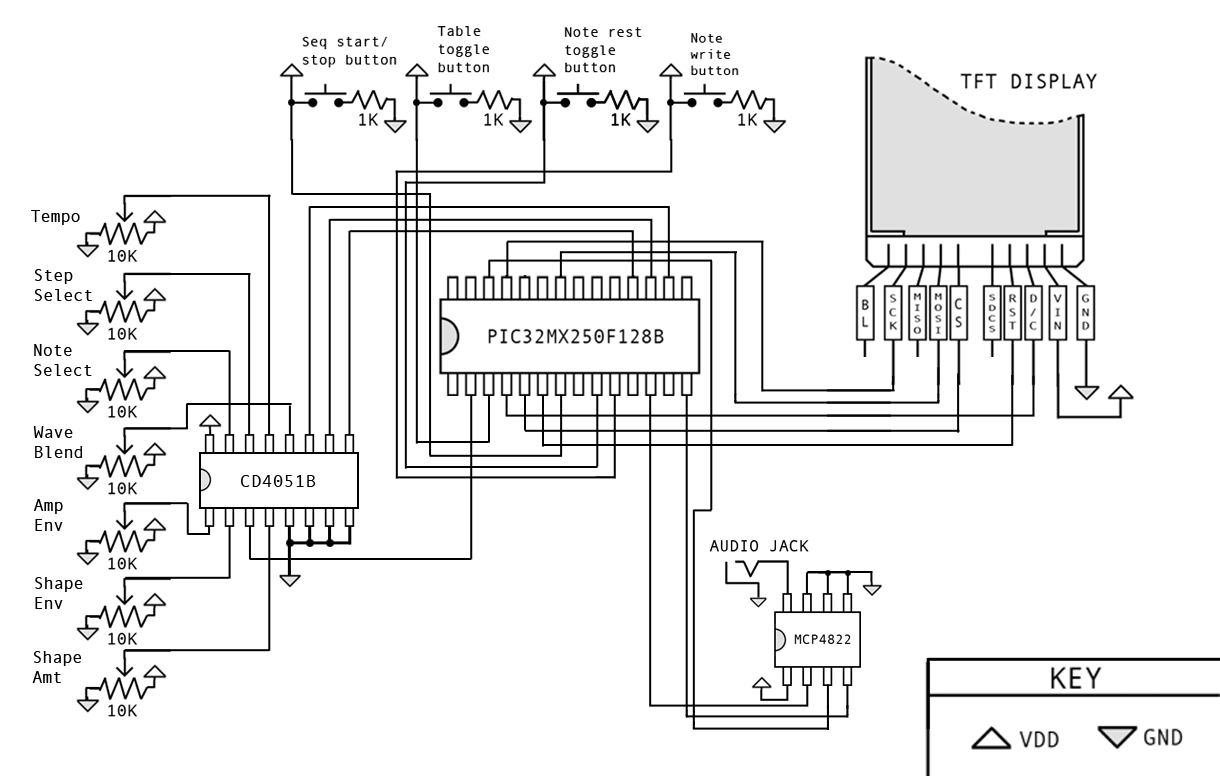
The hardware for the synthesizer is composed of a PIC32 microcontroller,
7 potentiometers, 4 buttons, an 8:1 analog multiplexer, a 12-bit DAC,
and a TFT display. Using user input from the various potentiometers and
buttons, the PIC then generates different sequences and waveforms based
upon the current inputs.
A full hardware diagram can be found in the
Schematics
section.
Our TFT display is connected the way it has been for the previous labs,
using pins 4, 5, 6, 22, and 25.
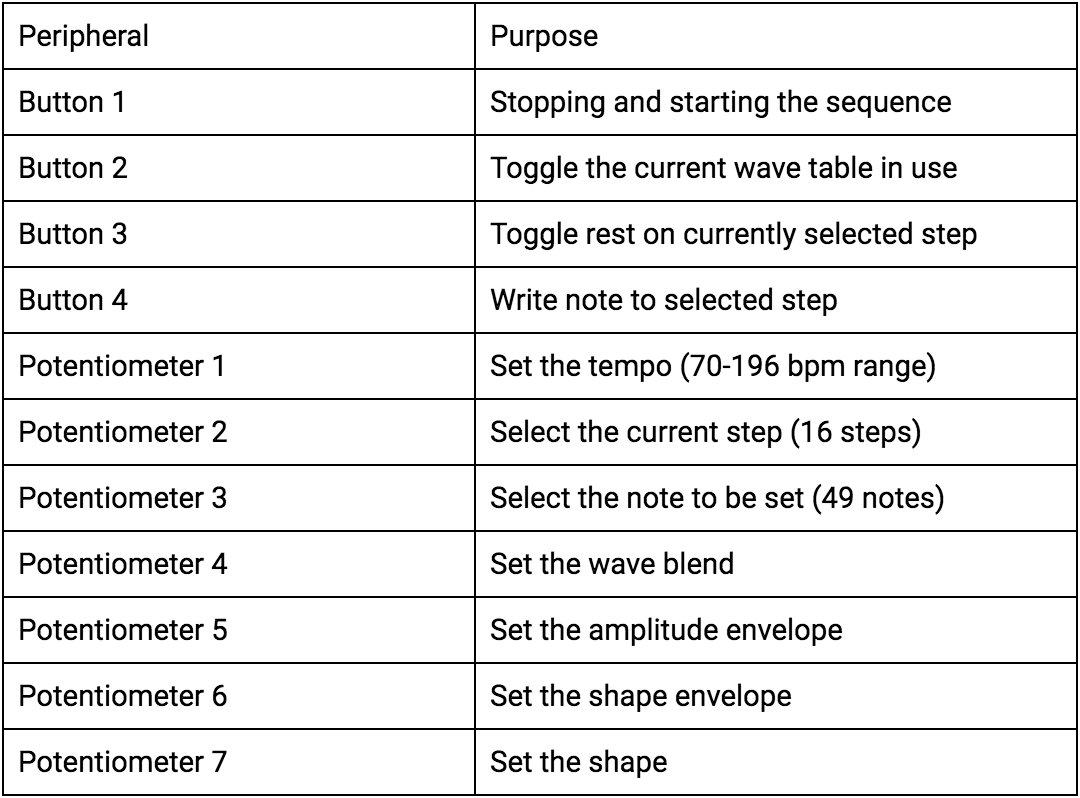
Button/Knob Control Functions
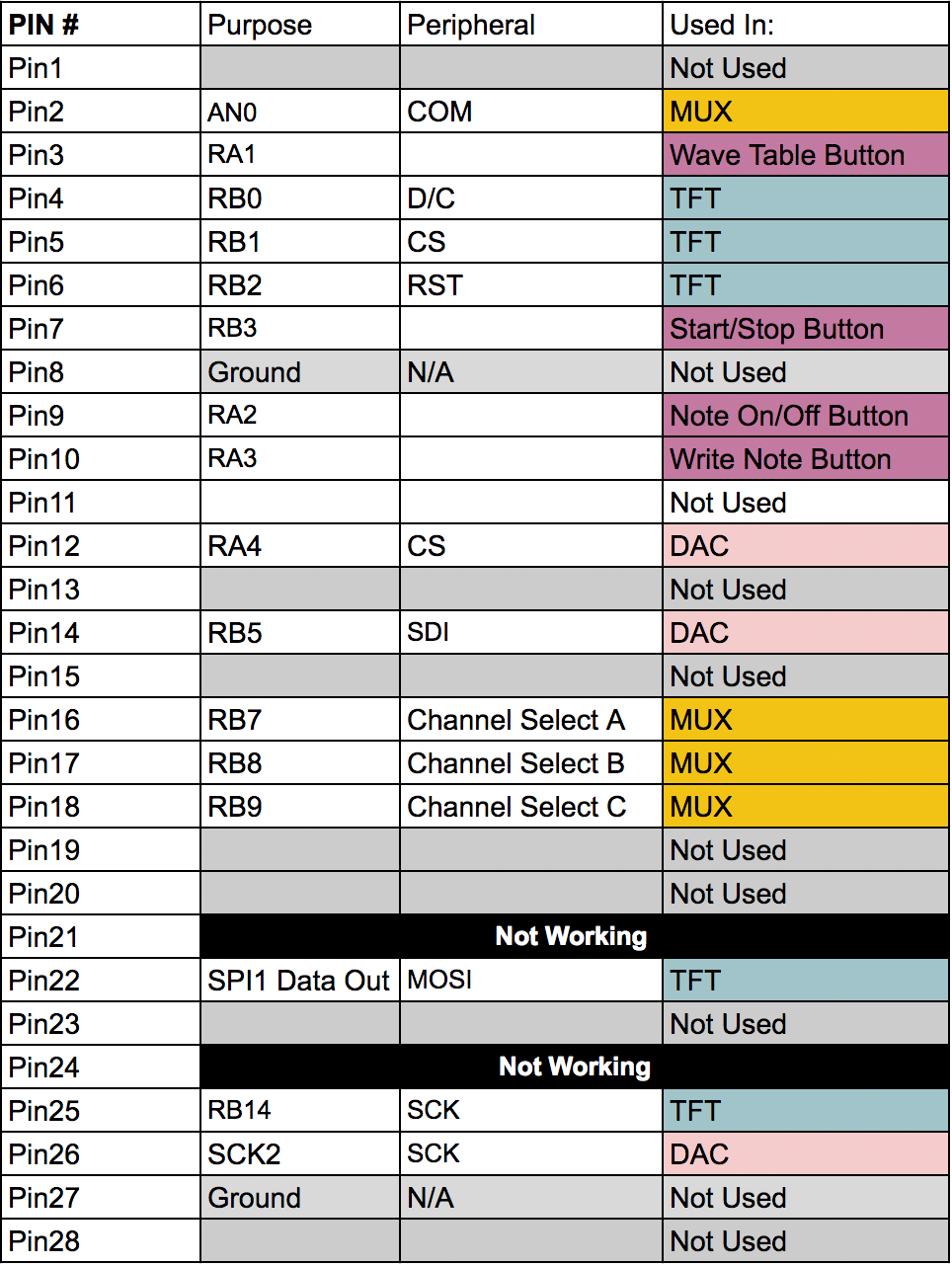
Pin Connections
The PIC32 then used direct digital synthesis running at 100 kHz to generate
the correct waveform specified by the input settings. The generation of
the waveform required the use of an external 12-bit DAC, the MCP4822.
The DAC has two output pins, VoutA and VoutB, of which we only use VoutA.
VoutB is sent to ground, along with Vss, and the LDAC pins.
The DAC is responsible for the main deliverable portion of our project,
so its function is quite visible. However, the other main bit of
hardware in our setup is the CD4051B multiplexer, which takes input
signals from all of our potentiometers and relieves pressure on the PIC32’s
ADC capabilities. Most of the ADC pins on the PIC32 are taken up by the
TFT display, and so only four pins exist for our 7 analog inputs.
Clearly, even if we were to use all the ADC inputs, there would be a need
for multiplexing, as there would be three knobs unconnected. If we were
to use multiple ADC pins, then we would also have to re-configure the
ADC setup in order to multiplex between all the ADC pins.
Under the hood, there exists only one ADC in the microcontroller, so it
would be multiplexing between all of the ADC pins, in addition to the
multiplexing we would be doing on each pin. The CD4051B perfectly addresses
this issue, due to it having eight inputs, outputting a single signal which
we could read on the one ADC pin on the PIC32. Thanks to the multiplexer,
we can keep the existing ADC configuration. Although the multiplexer requires
three extra channel inputs, which are controlled by the PIC32, we have plenty
more options with it, seeing as they can be digital outputs. The multiplexer
takes Vdd from the PIC32 power rail, and uses all the signal input pins except
for Signal 5, which we grounded. The Vss, Vee, and INH pins were also sent
to ground.
In order to stabilize the voltage output by the PIC32, we placed various 10µF
capacitors between power and ground on the hardware. This smoothes out
spikes and drops in the 3.3V output of the microcontroller.
All of the preexisting code we used was boilerplate code from the ECE 4760
course website for setting up ISRs, DACs, I/O pins, and timers. We also
used the
Protothreads
library by Adam Dunkels, and the tft_master.c/tft_gfx.c libraries
provided by Professor Land.
The most vexing bottleneck in our project was getting the multiplexer to work
properly. After wiring it up according to the data sheet, it would only function
intermittently, working properly sometimes, and then being completely unresponsive
at others. In addition to this, when the hardware did function, a few potentiometer
inputs seemed to interact with others. Specifically, the first signal input would
be altered slightly by every other knob, and the sixth knob would bleed into all
other inputs. Since the multiplexer would work sporadically and unpredictably, it didn’t
seem as if software was the issue, though it was possible. When touching and bending
wires, we would occasionally be able to change the functionality of multiplexer, but
these events would not affect the multiplexer consistently.
One possible explanation for
this behavior takes into account the electric fields our bodies generate.
Depending on where we would poke wires and our own orientation, the multiplexer signal
wires could have been affected. This issue could be exacerbated by the fact
that we had channel select wires crossing over the analog outputs of the multiplexer,
which were both in close proximity to our power rails. This served as part of
the motivation to move our hardware setup to perfboard. To further address
the signal-to-noise issue, we placed capacitors between power and ground, and moved
wires away from the TFT display. In case of internally broken wires, we also
replaced all the signal wires connecting to the multiplexer. In order to address the
possible internal signal bleeding of the multiplexer, we grounded pin 5 of the multiplexer,
which equated to the 6th signal input, the multiplexer pins being 0-indexed.
After taking all the actions listed above, the multiplexer behaved more consistently, but
we were unable to read from more than 2 different sources, beyond which we received
garbage data. This issue this time was a software issue; we weren’t waiting
long enough between switching index bits to read the ADC pin. The PIC’s DigitalRead
settling time, internal ADC sampling speeds, and the multiplexer’s switching speed require
dozens of processor cycles of waiting, so we put in a delay of approximately a microsecond
before each read. The function for waiting 1µs included in the TFT library was not working
for some reason, so this wait was achieved using a for loop with no body.
Carrying out these fixes largely took care of all the issues we were seeing. Because we
implemented most of these methods in parallel, we were unable to isolate
one particular root cause of the malfunctioning, but taken together,
we would say that the issues were some combination of the challenges
mentioned above.
Another issue that was present throughout much of the project was the random
appearance of white dots on the TFT display. Over time after power-on, pixels
that should have stayed black would become white.The code never
called for white dots to be printed, so we couldn’t isolate the error. Our first
fix to this problem was to write a segment of the screen black every 10 seconds.
However, this was a purely aesthetic fix, which did not remove the underlying
problem.
Eventually, we realized that putting our sequencer's active-step TFT updates in an ISR
to achieve a constant, fast update at high tempos was the root of the problem. Since
we had TFT updates in this ISR, and in a separate thread used to update more slowly-
updating parts of the UI, there were many scheduling scenarios in which the serial data
sent to the TFT was corrupted. In some instances, this conflict would cause the PIC32
to crash entirely. After realizing the origin of our problem, we moved all TFT updates
to a single thread. This thread ran at 15-20 fps, and due to the less-frequent update,
our sequencer's active-step readout could be jumpy at certain sequence speeds. However,
we gained overall performance by eliminating this potentially fatal stress on the serial
data bus.






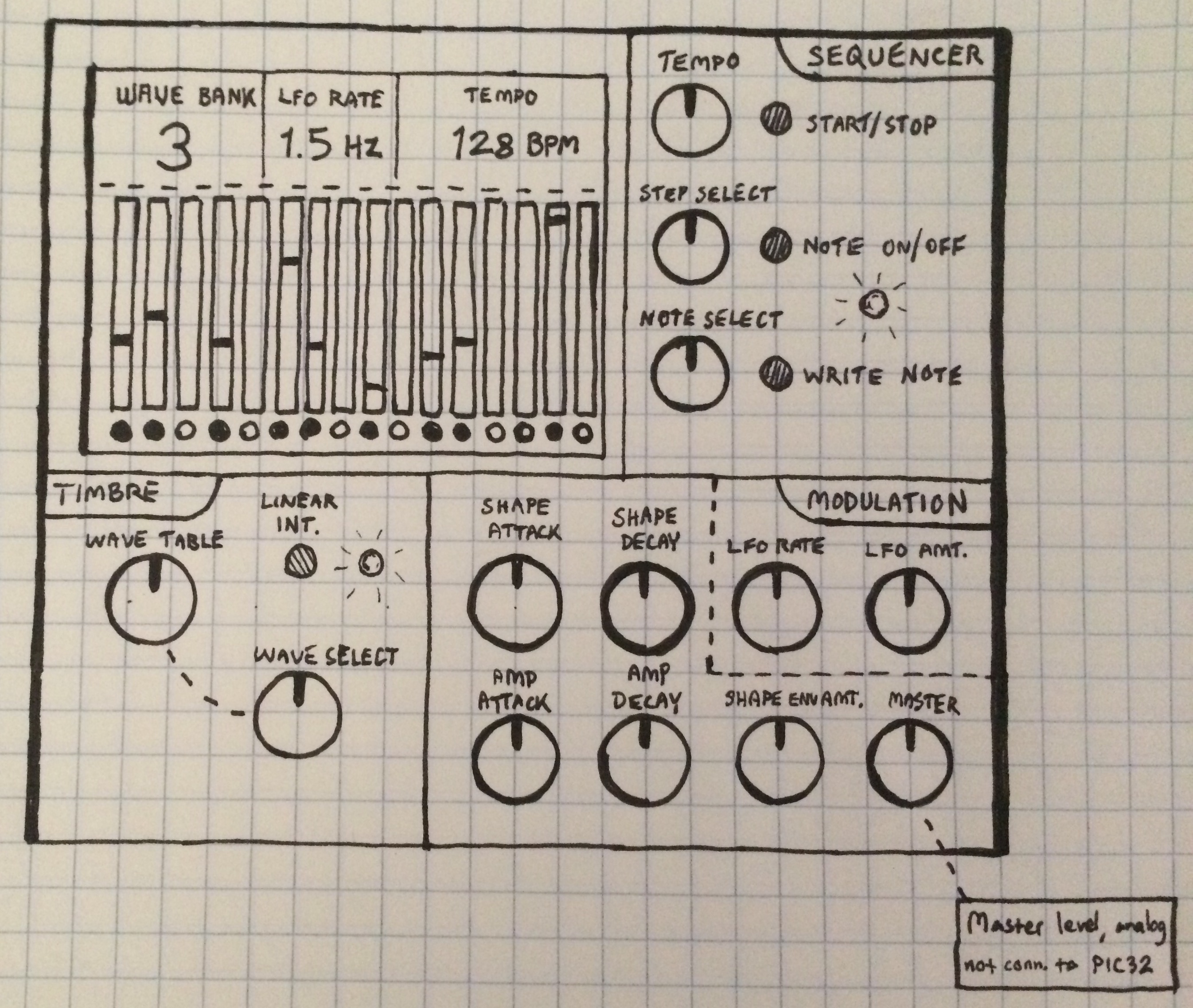
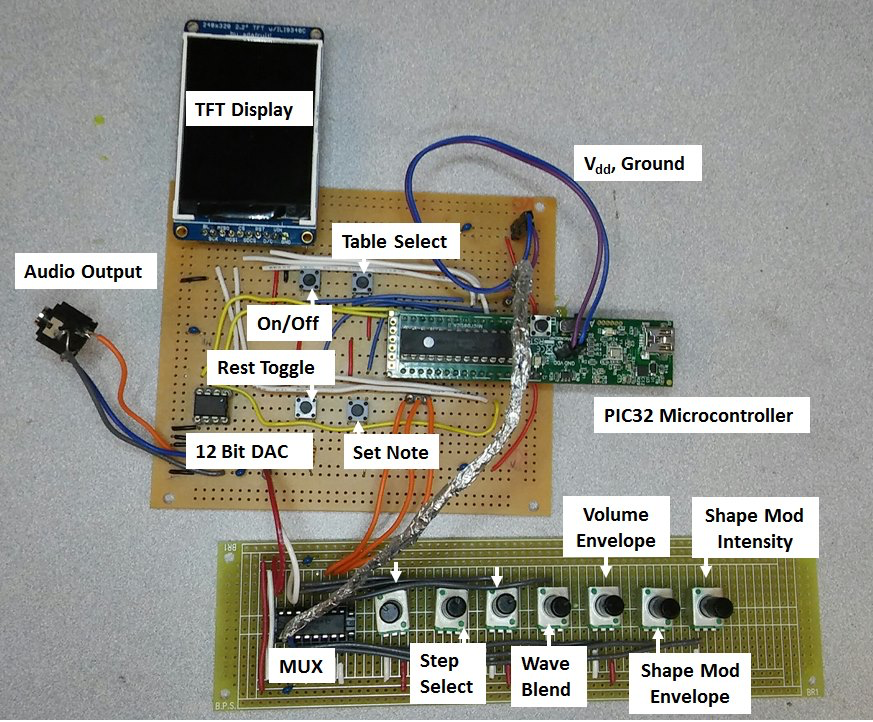 Some of the design changes between the intial and final designs were
just logistic changes, such as the two perfboards in the final product rather
than the initial projection of one large PCB behind a panel. The layout is
a more messy in our final prototype, with the knobs and buttons unlabeled
and ungrouped. We also cut back on a few different controls, both for usability
and because of hardware limitations. The LFO and its intensity control was
removed entirely. The amplitude and shape envelopes were cut back from two
knobs each, for attack and decay, to one knob each, using a modal envelope
scheme. This change allowed for most common attack/decay parameter combinations,
but avoided a complicated control scheme and complicated ADC configuration.
Some of the design changes between the intial and final designs were
just logistic changes, such as the two perfboards in the final product rather
than the initial projection of one large PCB behind a panel. The layout is
a more messy in our final prototype, with the knobs and buttons unlabeled
and ungrouped. We also cut back on a few different controls, both for usability
and because of hardware limitations. The LFO and its intensity control was
removed entirely. The amplitude and shape envelopes were cut back from two
knobs each, for attack and decay, to one knob each, using a modal envelope
scheme. This change allowed for most common attack/decay parameter combinations,
but avoided a complicated control scheme and complicated ADC configuration.