Software Design
the code behind it all
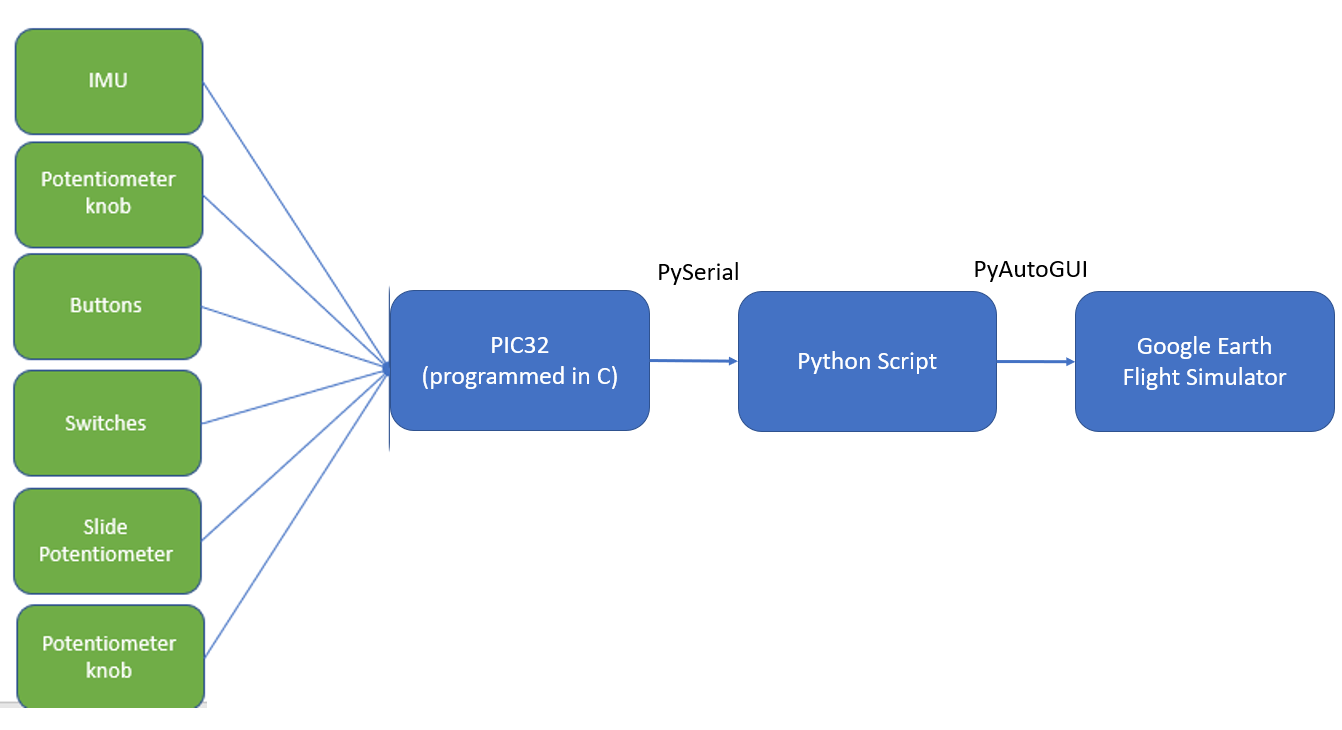
PIC32: MPLAB X IDE v3.05 was used to code the PIC32 in the C language. It can be downloaded for free online.
The code begins with including config.h, to configure the clock and protoThreads. I then include the graphics libraries and the i2c helper file, which was used from a previous project (linked is in appendix). I enable pull-up macros for ports A and B. I then declare a number of integers that work as state variables, holding the values that are output to the computer. Details are outlined in comments.
The first of two threads is the one second counter, protothread_time. This is not important to the flight simulator, and can be omitted. I used this function to troubleshoot by offering a template to print to the TFT. I yield for 1 second and then use the TFT functions to write the system time, increasing the sys_time_seconds counter each time the thread is run.
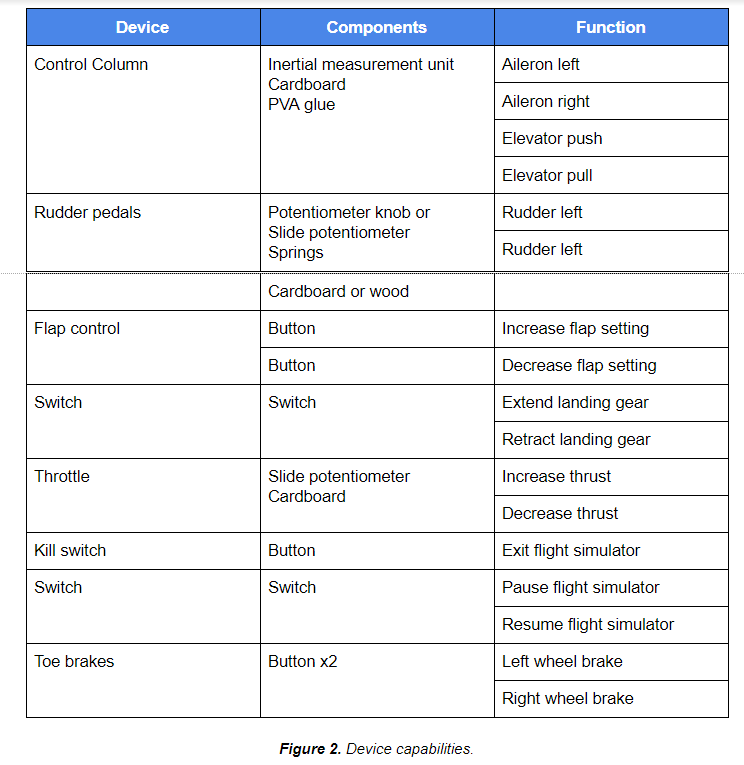
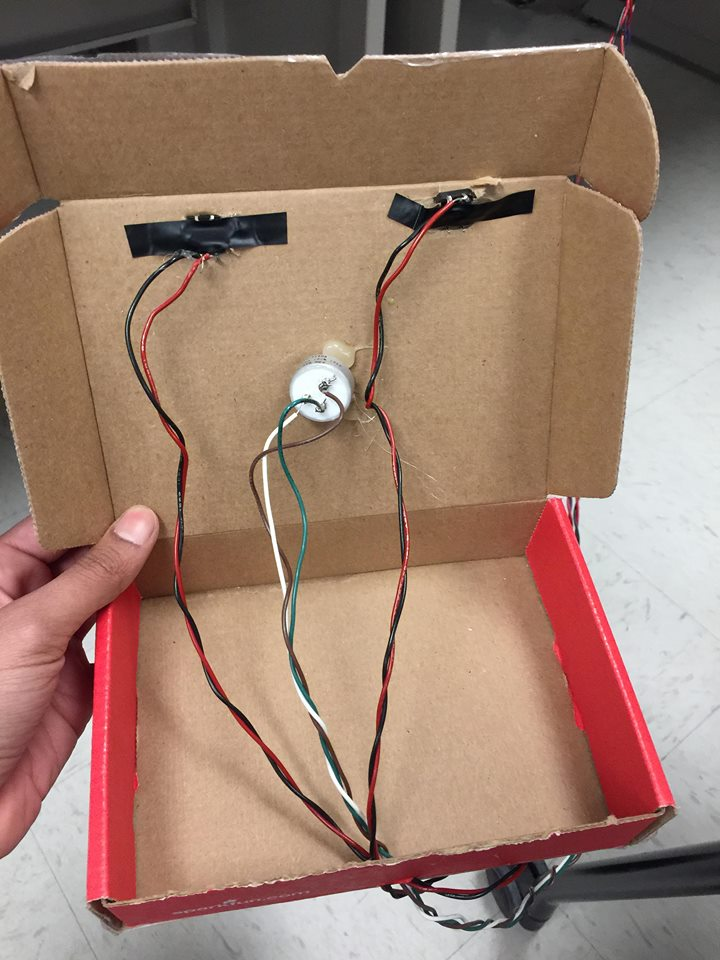
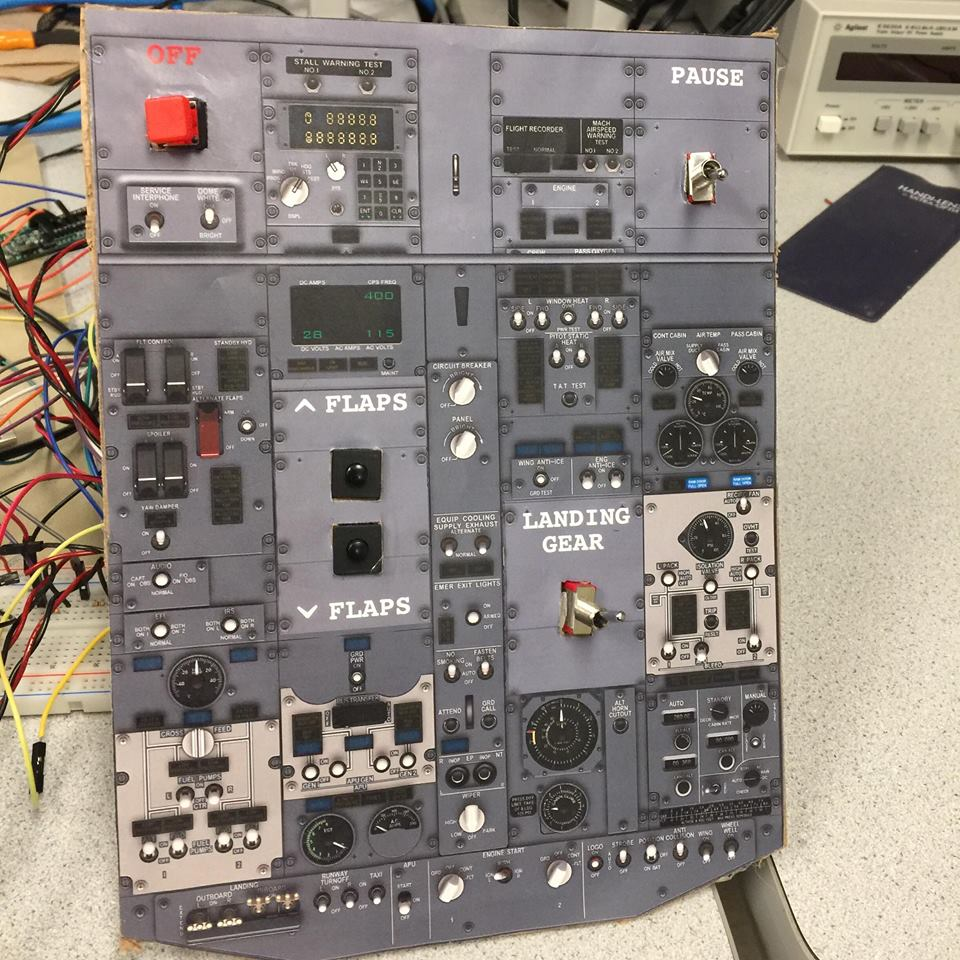
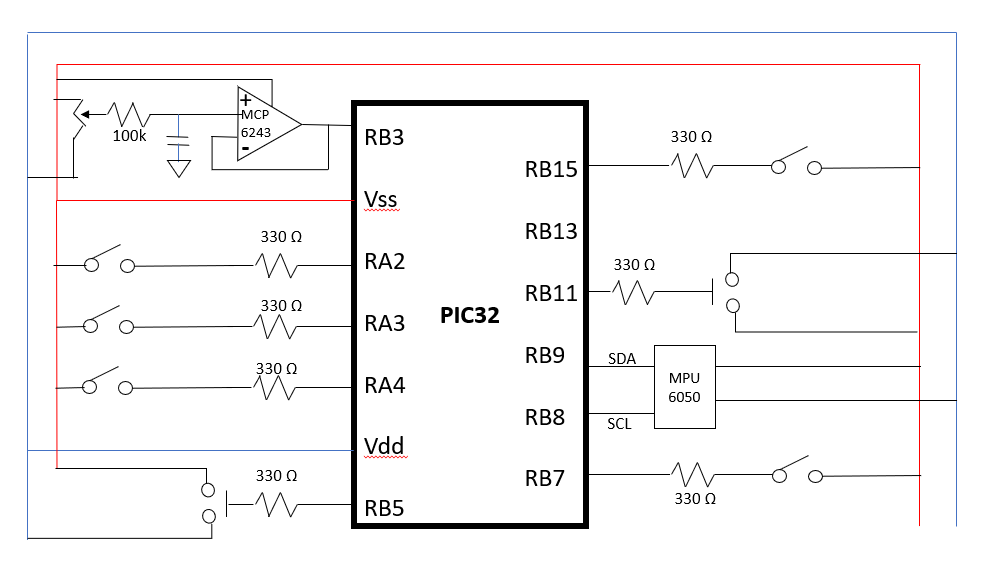
The second thread, protothread_serial, performs the bulk of the computation and input-output handling. It reads the status of the flap up, flap down, kill switch, pause button, landing gear, brake left, and brake right buttons. It also uses two channels of the analog-to-digital converter to read the status of the two potentiometers. Next, I read the IMU values using a function defined in the header file i2c_helper.h. A link to this project is provided in the appendix. I modified this header file to send six pieces of data: the x, y, and z values of the gyroscope, and the x, y, and z values of the accelerometer. These values are parsed and then the tilt is calculated using trigonometry. I then average the values over five cycles, and the averaged values are stored in x_avg and y_avg. This simple filter helps to stabilize any spikes in the data, as the accelerometer is not always accurate. Finally, I send all this data through the serial buffer to the computer, separated by spaces. In total, there are 12 parameters being sent serially.
A few helper functions were defined to aid in the set up. The first was my_adc_setup(). This is where the channels of the analog-to-digital converters are set, opened and enabled. The next is my_tft_setup(), which initializes the display. Again, this is unnecessary for the flight simulator, but useful for debugging. The third is my_button_setup(), which initializes each of the buttons and switches, enabling the pull downs and setting the pins to inputs. The fourth is my_imu_setup(), which opens the I2C channel, takes the IMU out of sleep mode, sets the gyro sensitivity, and calibrates the gyroscope.
In the main(void), I set up protoThreads, set up system-wide interrupts, initialize the threads, call the helper functions mentioned above, and finally, schedule the threads.
The i2c_helper.h header file is from the Self-Balancing Robot project. i2c_write() writes data to a specific register in the slave IMU. i2c_read() reads back data from a specific register. readImuValues() is a helper function that reads back all three axes of both the gyroscope and accelerometer sensors. calibrateGyros() is a function that, when powered on and and the robot is lying still, takes 1000 measurements of the gyroscope to estimate its bias.
Python: Python 3.7 (64 bit) was used, and it is available for download for free online. The pyserial library was used for serial communication. The Python module PyAutoGUI 0.9.38 was also used to control the keyboard. The code is open-sourced and free to edit and download on GitHub, and can be installed using the Python Package Index. It was written by Al Sweigart and has a BSD license. Links are available in the appendix.
First, we import modules for serial communication, keyboard/mouse control, and to use the universal newline mode, and time for delays. We declare the variables that hold the state of the various inputs and outputs. While the kill switch has not been asserted, we read the line of data and parse it by splitting it at each space in the string. For the flaps, we check to see if the value of the button received is different from the previous value, and if so, we write the data using shortcuts for the flight simulator using the PyAutoGUI module. The same works for the kill switch and pause button. With the left and right brakes, I incorporate some delay by pressing and releasing the keys separately. The throttle includes some delay, and only presses it if the difference between the previous throttle and the current throttle values were significantly different to avoid jitter. There are 10 values that the throttle can support. The IMU data is capped by the boundary conditions, scaled, and moved. This only samples every 8 cycles to again avoid jitter. For the rudder, it also samples once every 8 cycles. The data is scaled to one of 25 allowed values. The buttons are pressed (in hotkey format) and released a number of times proportional to the difference in rudder potentiometer values.
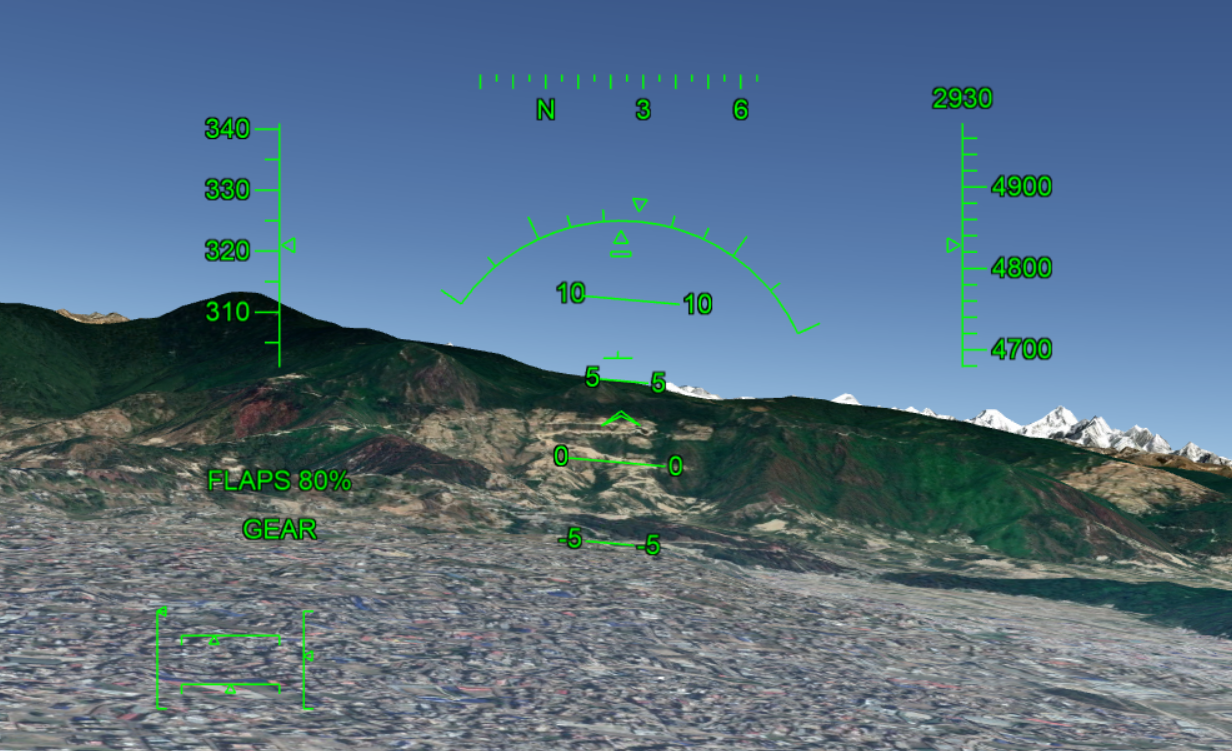
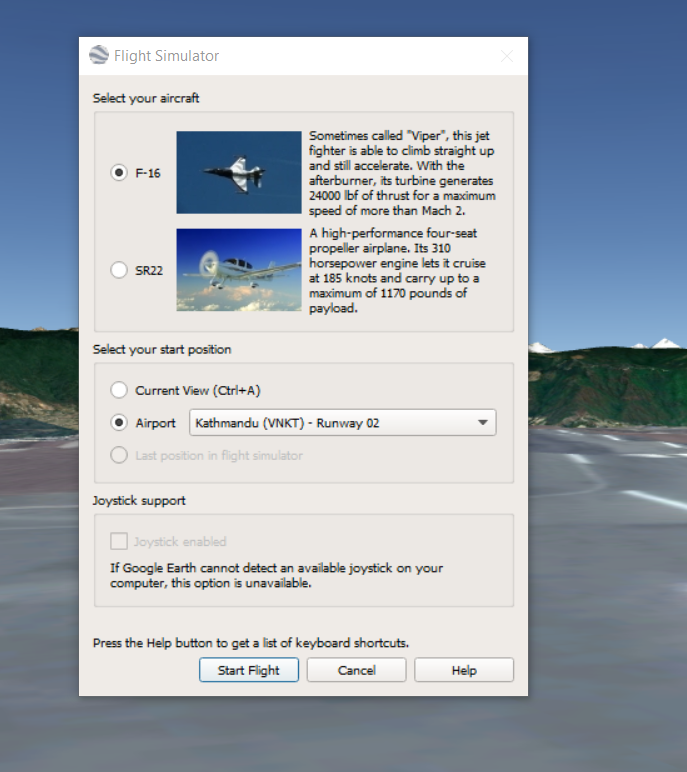
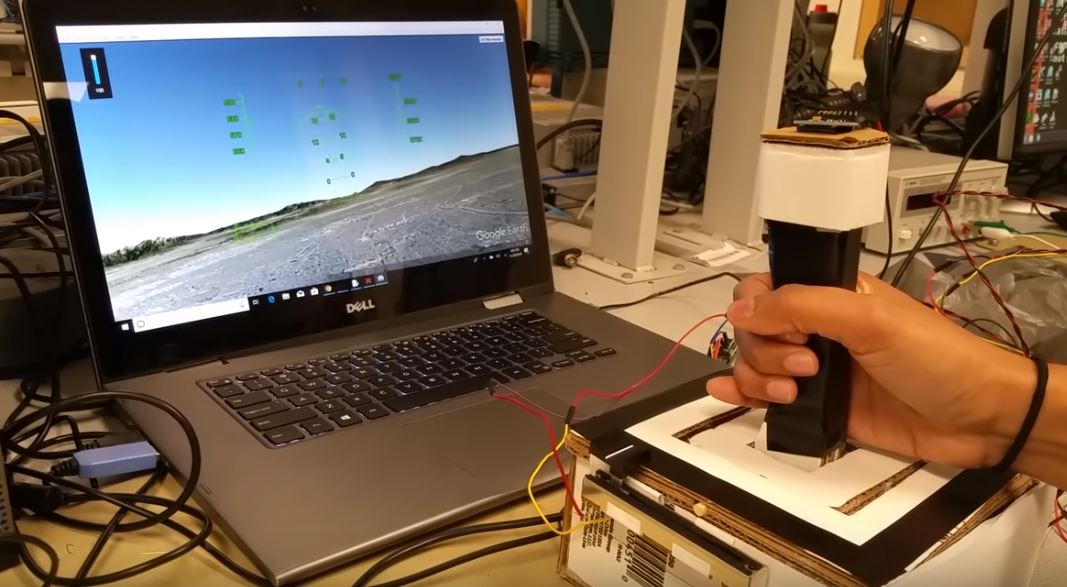
Simulation: Google Earth Pro, the desktop version of Google Earth, will be used. It is available for download for free online. Its use is acceptable under principles of fair use, but not for commercial use.
To enter, select Tools -> Enter Flight Simulator. Select the aircraft that you want to fly and the airport you want to fly out of. Press enter, ensure that the Python and microcontrollers are engaged, and you are ready to fly!