High Level Design
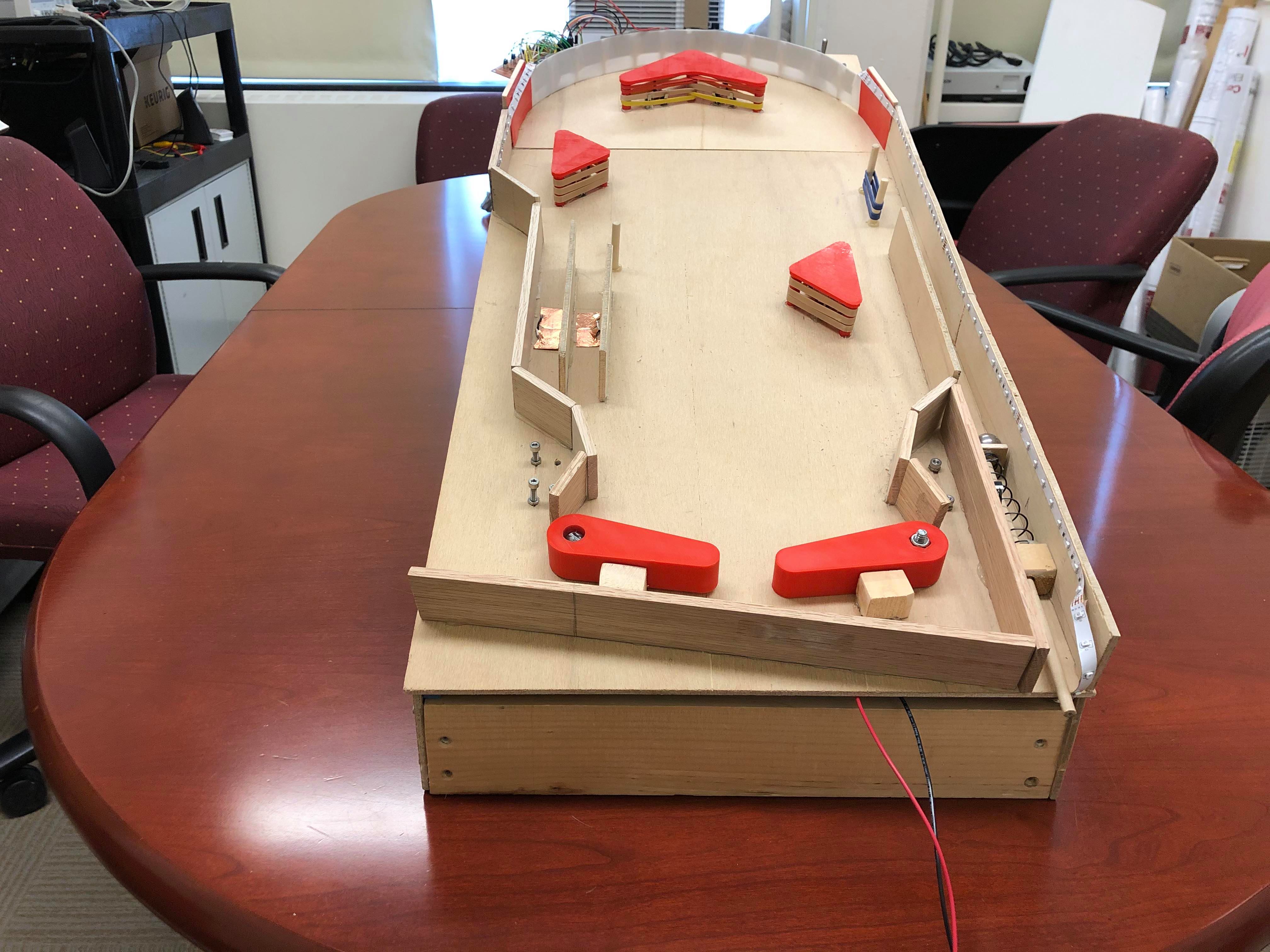
We quickly came to learn that there was a staggering number of design obstacles that we had to overcome in order to make our pinball machine successfully and satisfyingly playable. Although it may seem like many of the components, such as the flippers, playing surface, and launching mechanism are purely mechanical, there was a lot of room for electrical integration that we were striving for. Indeed, integration was the most difficult aspect of our project: designing the physical components to be mechanically sound while leaving room for adding wiring and other electrical components would prove to be the most time-consuming part of the project, especially when we also had to consider aesthetics. In this section, we will describe the overall design and components involved in our project, while in the next section we will go into detail about the challenges we faced during implementation.
Flippers
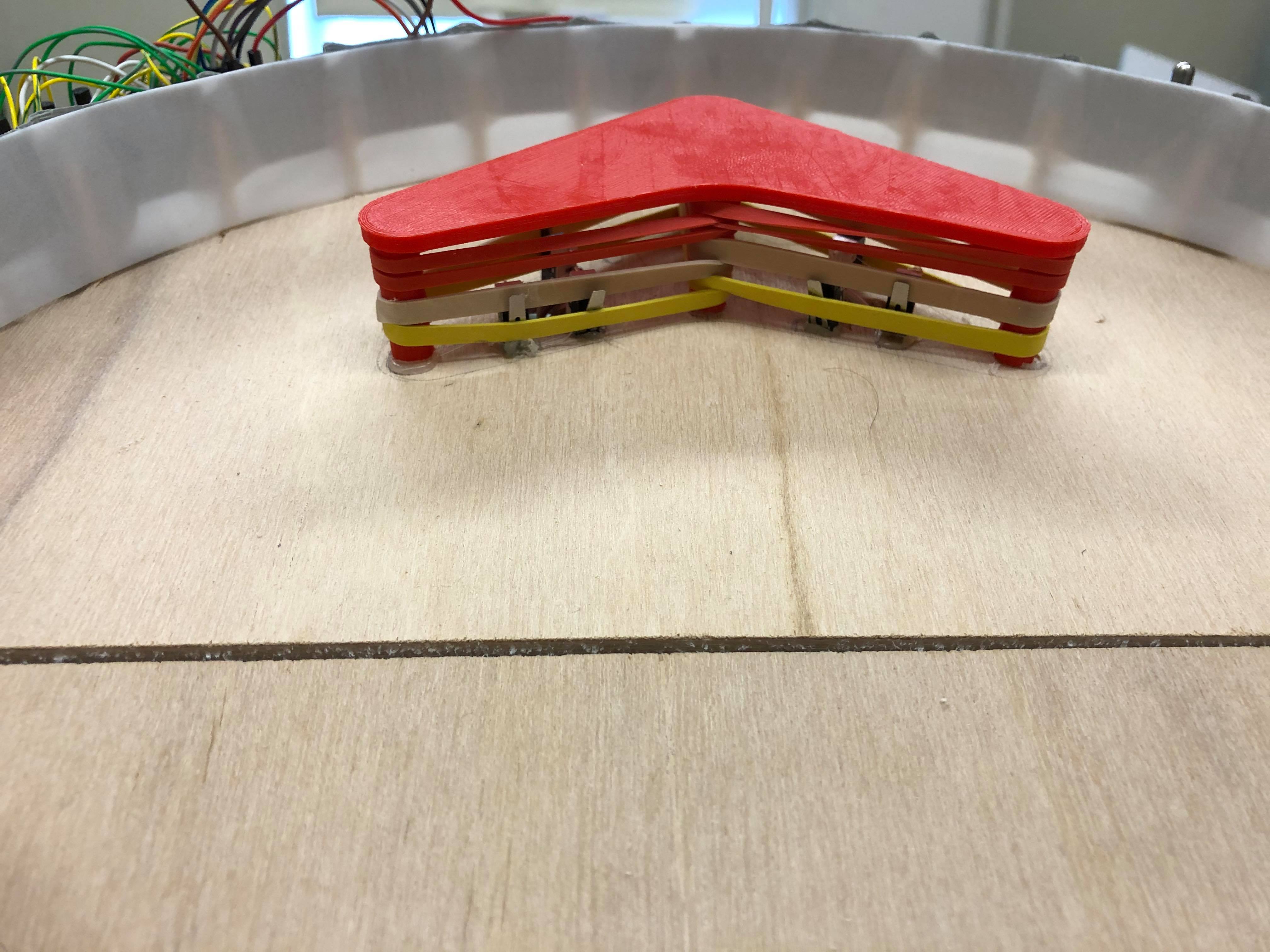
The first aspect of the pinball machine that we considered were the flippers, since they’re literally the driving force behind pinball machines. After doing some research online and watching videos on YouTube about constructing a pinball machine, we chose solenoids as the actuation mechanism for the paddles since they would give enough power to launch the ball across the playing field. We chose 12V, 8A solenoids which we bought from Amazon since when we tested with 2A solenoids, the impulse was not nearly strong enough to launch the ball any significant distance. We then used CAD (AutoDesk Inventor) to design and visualize the physical parts we’d need for the game, including the paddles and obstacles on the playing field, which we felt would be best suited for 3D-printing. After thorough prototyping, the following design worked the best for the flippers:
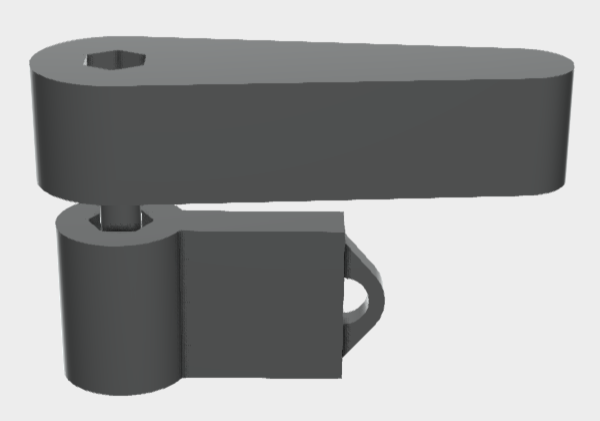
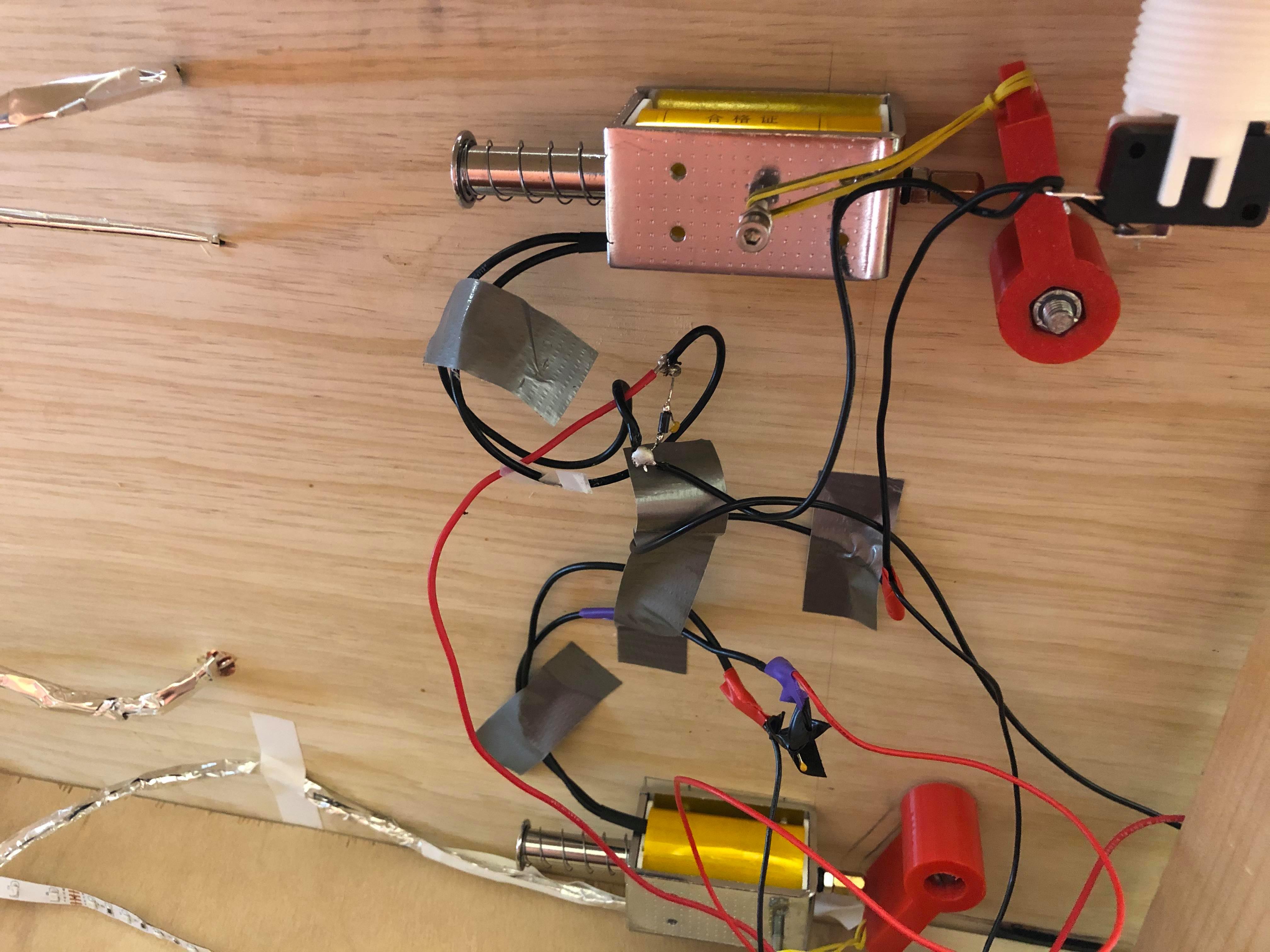
As seen in the above pictures, the flipper actuation mechanism is composed of two pieces: the flippers and a lower actuation piece. Holes for a screw was designed into both pieces such that these two pieces sandwich the plywood playing field and move as a single unit. In order to avoid having the flippers rotate about the screw every time it was actuated, we allowed enough space within both the flipper and the back piece such that lock nuts could sit inside of them to secure both pieces in place relative to each other and the screw. Lastly, the long end of the back piece rests on the solenoid in its resting state such that when the solenoid is actuated the back piece turns, moving the flipper accordingly. The back piece also has a hook on it, which we used to tie a rubber-band around and connect to the solenoid loosely; when the flipper is actuated, the back piece is pulled back due to the rubber band and the flipper can quickly return to its natural position. The solenoids were then connected up to buttons on the side of the machine.
Obstacles
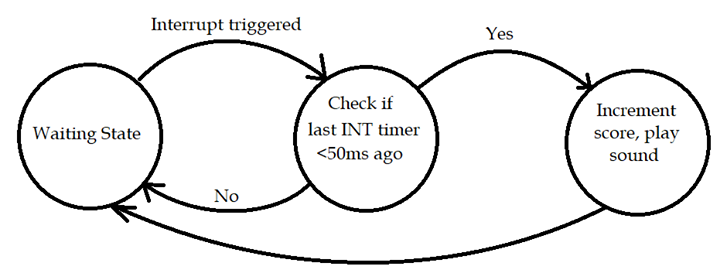
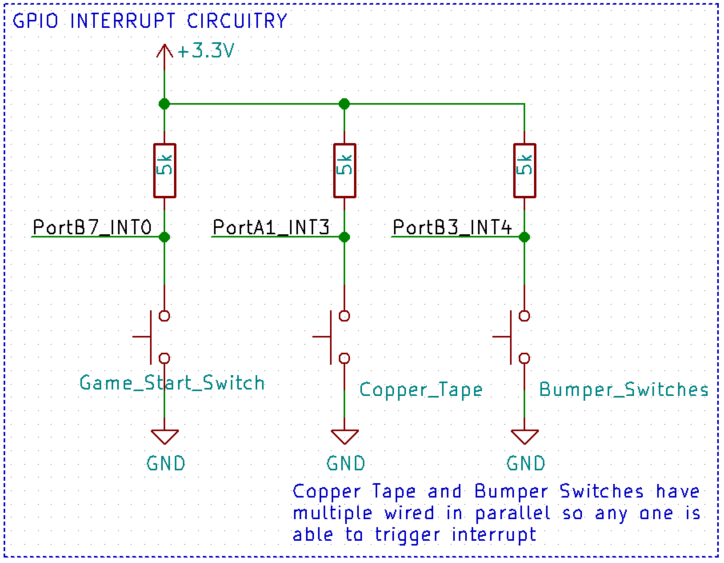
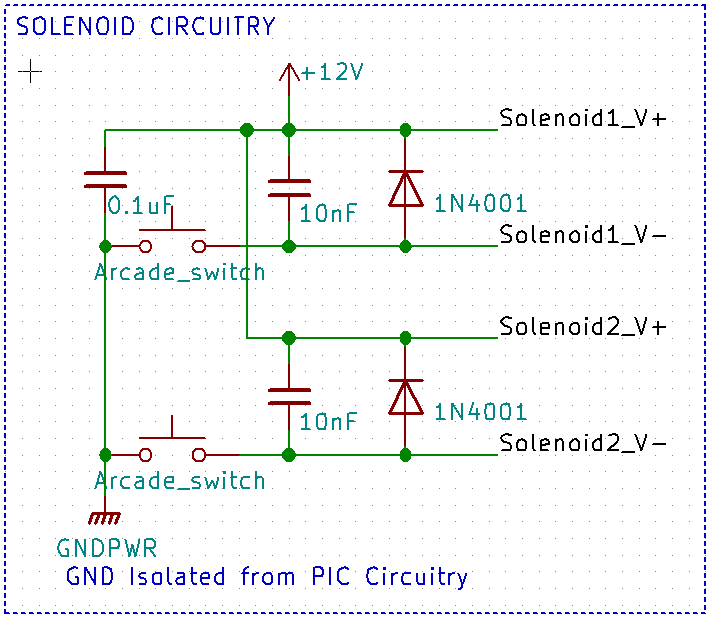
In addition to the flippers, we also used CAD to design the obstacles on the playing field: two triangular bumpers and a boomerang-shaped bumper. These also went through several revisions since they were the most important element for scoring, and we had to make sure that the ball would interact with them properly. In fact, the next thing we had to consider was how to properly keep score. Since points in pinball are accrued through contacting obstacles, we thought that given the power of the flipper solenoids, limit switches would work well for detecting impacts against any raised obstacles on the playing field. We also decided that rather than continuously polling for input, which would be wasted time on the processor, we would have limit switch inputs trigger interrupts, which should be more consistent for detecting impacts (Schematic in Appendix B).
For the triangle obstacles, we chose to put two limit switches for the long side and one for each shorter side. Since the switches are normally open, we tied all four normally open terminals together and all four common terminals together. A hole was drilled in the board such that the bunch of switches could be threaded through it. The obstacle was then placed over the hole and the switches were placed along the perimeter of the obstacle as such:
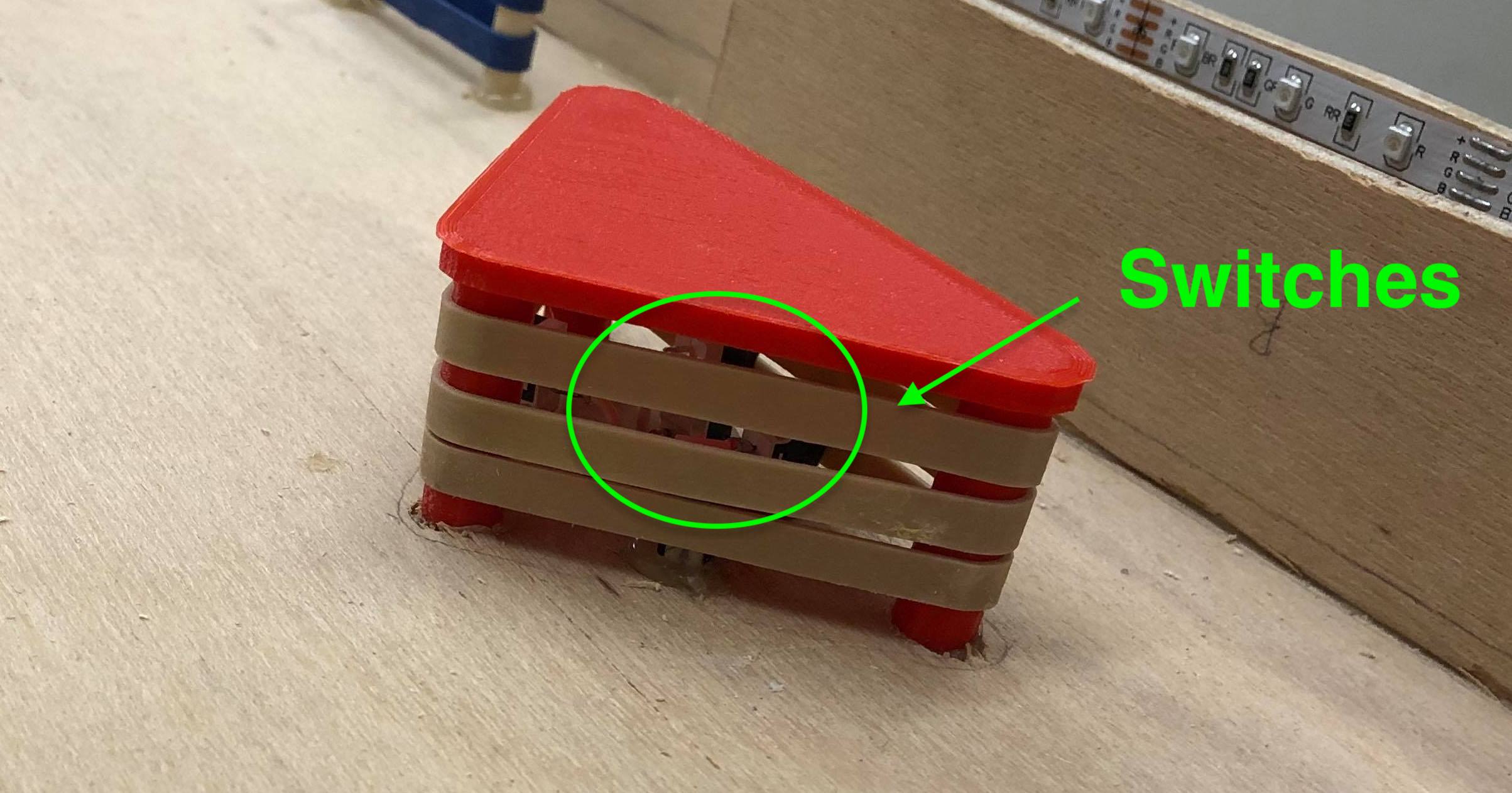
The rubber bands were used to both protect the switch and also provide the bounce-back effect of typical pinball obstacles. The common leads were grounded and the NO (normally open) leads were tied to a free pin on the big board. This was also done for the boomerang, where we used an additional 2 switches since the obstacle was larger. An interrupt for an obstacle would be triggered whenever one of the switches was depressed, which would increment the score by 50.
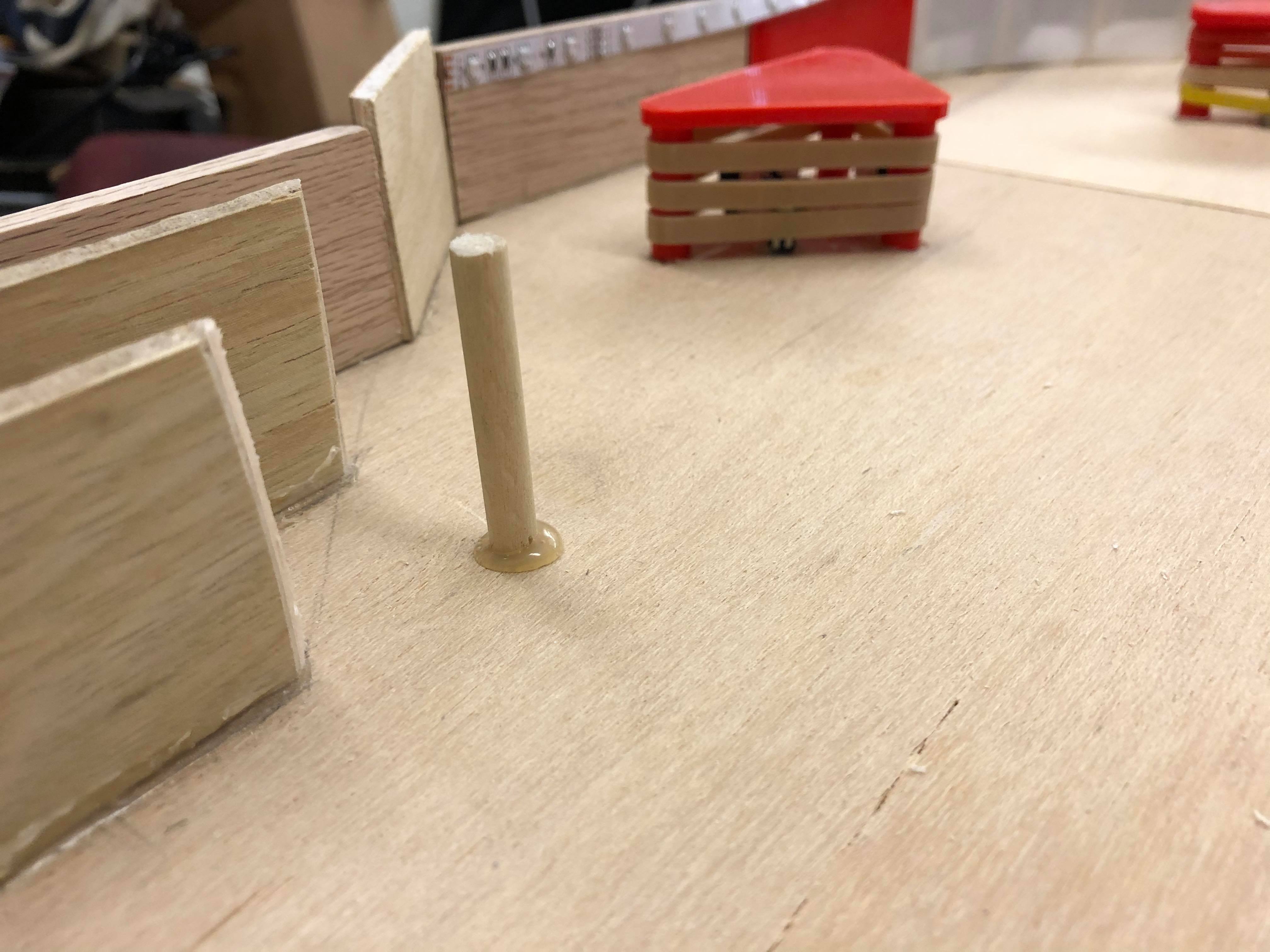
Again drawing inspiration from classic pinball machines, we decided to add two tracks on the left side of the playing field. These would be relatively harder to reach than simply hitting the bumper obstacles, so the amount of points for going down these tracks was worth double the amount for bumper obstacles. At the suggestion of Professor Land, to detect when balls rolled down the tracks, we tried using two pieces of copper tape are placed extremely close together such that when the metal ball rolls down the track and over the tapes, a connection is made, triggering an interrupt and incrementing the score by 100. The triggering was rather consistent, and was a fantastic addition to the game but the mechanism itself would prove to be slightly problematic; this will be discussed in the “Results” section.

Other Designs
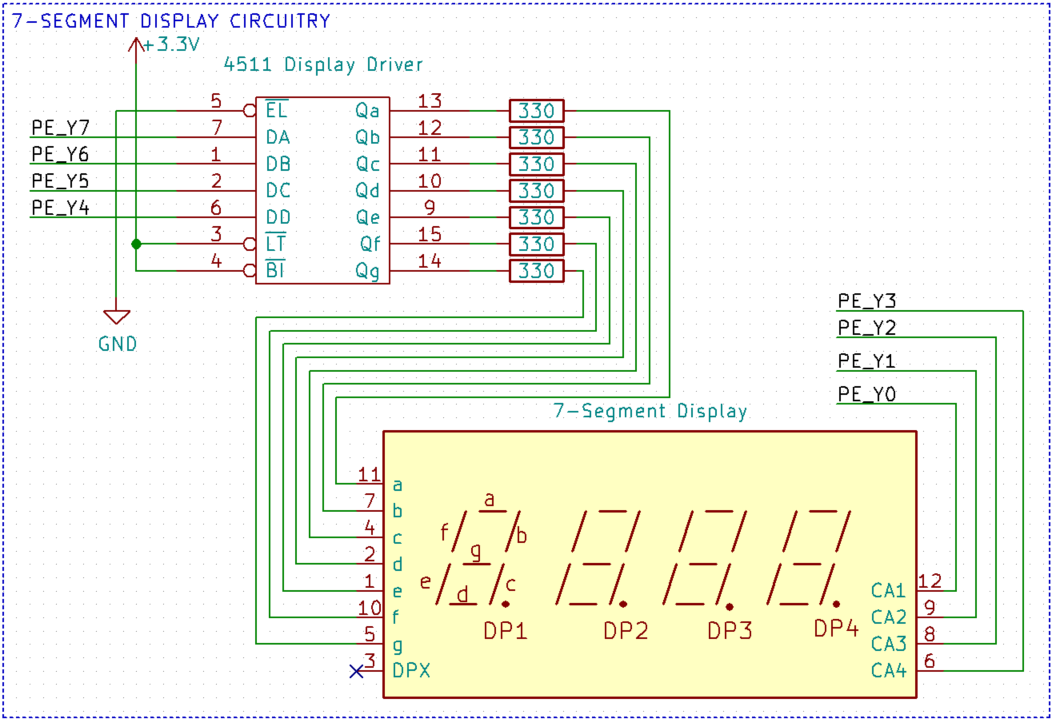
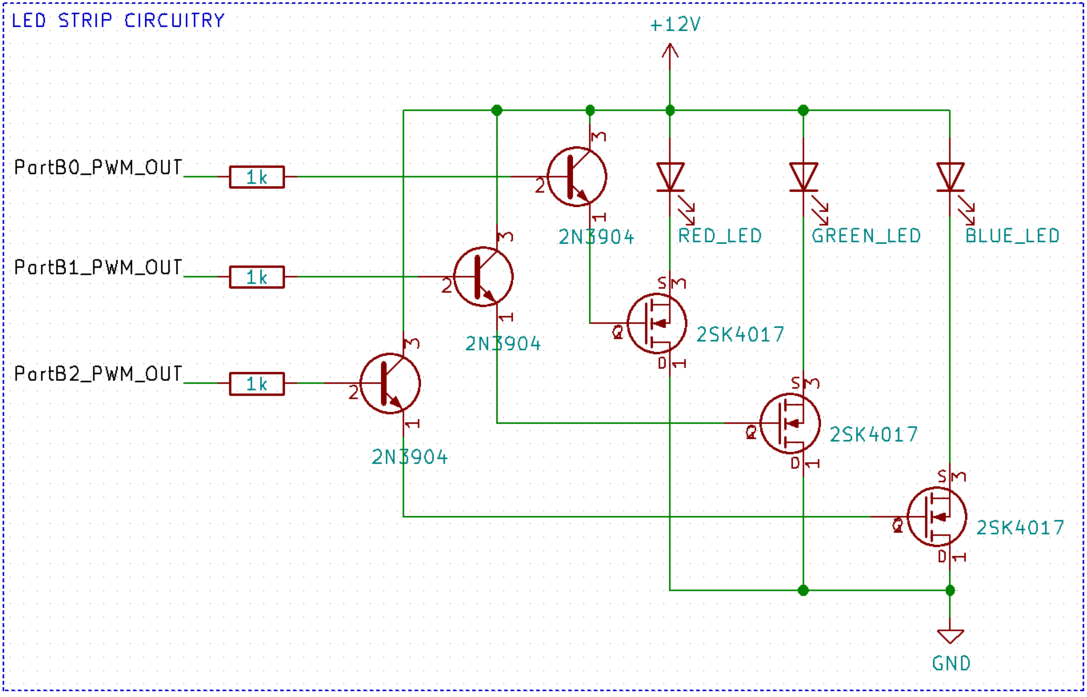
The score was displayed on a small 4 digit 7-segment display, which we placed at the top right of the machine. Sound was also played whenever an obstacle was hit or the ball ran over the tracks. We modelled the sounds after classic pinball sounds like the cashing of a cash register and the tune of a slide whistle. A start lever was placed on the top right of the machine and an LED strip was added to change color according to the state of the game and the current score.
There were a couple of design decisions that had to be made along the way, namely how to launch the ball. After much back and forth, we decided that a launcher would stay most true to the pinball game and would be an interesting challenge to create. After luckily finding a good spring in lab, we designed the launcher by threading a wooden dowel through the spring with a square piece on the end of it. The other end of the dowel is threaded through a wooden block attached to the playing field, and the spring is glued on both ends to the wooden pieces. The launch mechanism can be seen as follows:

Subsequently, we decided that having a rounded top would provide better game play and make the ball launch a lot smoother as the ball could ride out the curved top. We found a piece of teflon in lab, cut up chopsticks, placed the cut pieces around a semicircle, and then glued the teflon to it, making up the back rim. The linear guides were also relatively freehanded, although we had originally CADed a design for them.
It is also important to note that we grossly overestimated the steepness of the incline for the game; we propped up the front of the machine with thick books to decrease the slope such that game play would be more fair and the copper tape had time to actuate.
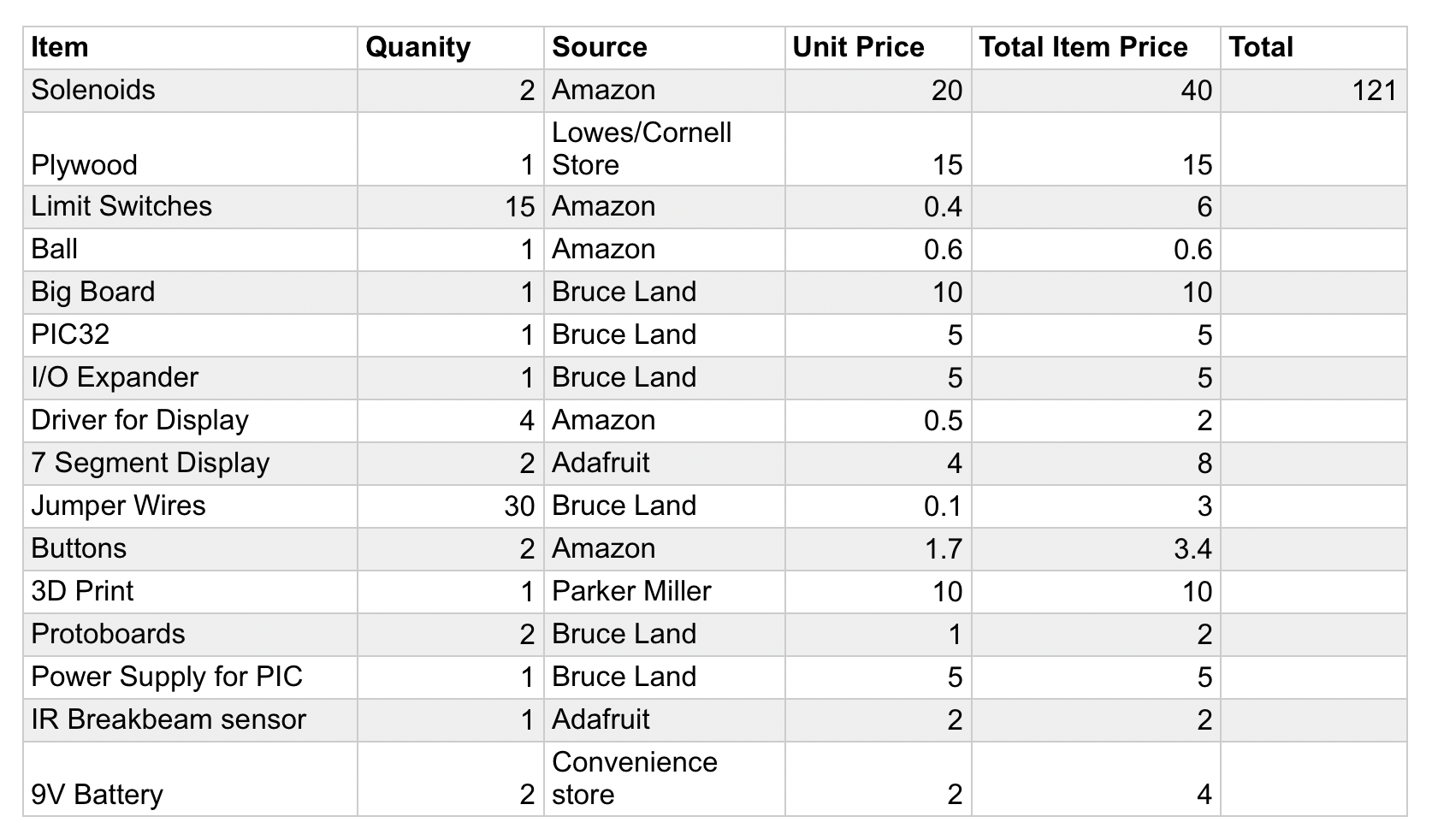
With regard to power supplies, a 15V 8A power supply tuned down to roughly 12V powered the solenoids. One of the lab bench adjustable power supplies powered the LED strip, which was a 12V strip that drew up to 0.5 amps. We powered the PIC itself using a 9V battery rather than the 5V power supply in an attempt to reduce the effects of electromagnetic interference from the solenoid circuit (more detail in the results section).