
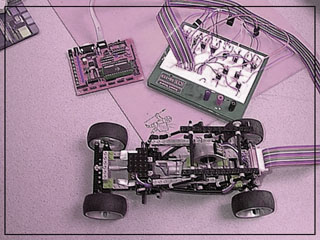
For the final project, we designed a Microcontroller-driven Lego Vehicle (MLV). This project makes use of the ATMEL AT90S8535 8-bit RISC microcontroller unit. The microcontroller basically functions to determine the user input through button pushes, drive the DC and stepper motors to provide motion to the MLV as well as to set the speed of the vehicle through the use of the onboard Analog-to-Digital converter.
Our project involves a combination of hardware and software design. The hardware part includes building the mechanical model for the MLV and circuitry to drive the DC and stepper motors by providing the necessary power and voltage level, as well as providing electrical protection for the microcontroller unit. The software part involves designing the state machine for the steering and motion control of the MLV, providing the stepping sequence for the stepper motor and controlling the LED signals.
Features
Steer Left, Steer Right, Forward, Reverse, Stop, Raise and Lower Tray.
DC motor provides the forward and reverse movements while the 2 stepper motors are used to provide steering and raising/lowering camera mount rack respectively.
Increase or decrease the speed of the vehicle by adjusting the trim-pot knob.
Left and right blinking signal, forward and reverse and park light.
Planetary gear system for forward and reverse movement for higher torque.