t h e a r m |
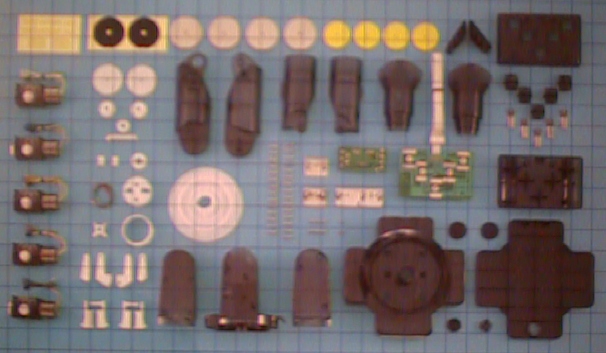
We looked all over the place for robotic arm kits that were not too expensive, but allowed a good range of motion and several different joints. We finally decided on the Robotic Arm Trainer 007 from OWI Incorporated. This arm kit was relatively easy to assemble (~3 hours) and was quite fun to construct! Here is what things looked like before we began:
The arm has five degrees of freedom and five 6V motors for each piece: the base, the shoulder, the elbow, the wrist, and the gripper.
 The arm kit came with an
el-cheapo control box, but we needed a more flexible circuit so
that we could control the motors via the microcontroller. So we
decided to build an h-bridge circuit with a pulse width modulation trigger and
direction signal to control the forward/reverse direction of a single
motor, and then we created a train of relays to select/deselect which
motors to move.
The arm kit came with an
el-cheapo control box, but we needed a more flexible circuit so
that we could control the motors via the microcontroller. So we
decided to build an h-bridge circuit with a pulse width modulation trigger and
direction signal to control the forward/reverse direction of a single
motor, and then we created a train of relays to select/deselect which
motors to move.