We
started thinking about this project quite early and at the same time we decided
to do something with servo or stepper motors. At first, we were thinking of
controlling the speed of a servo-motor using PWM output of Atmel 8515
micro-controller. After doing some research and visiting the website of Pitney Bowes, the largest manufacturer of Postage
Meters, we decided to go for a little bit more complicated project and make an
Automatic-feed Postage Meter capable of accepting different envelop sizes.
The
project did not only require a great deal of code writing and electrical
wiring, but it also made us design the architecture and mechanical parts of the
system to handle the paper properly. Especially, the characteristics of the
paper made the design even more complicated during calibration. The spacing
between the plastic rods, the positions of stepper motors, plastic rods,
solenoids, envelope tray, keypad and LCD had to be calculated very accurately
to prevent jamming of the paper. We used Plexiglas to build our machine out of,
and it was very time consuming to cut and shape the material. We would like to
thank Daniela Quesada, a junior in College of Architecture, Arts and Planning,
for helping us throughout the project.
.
![]() High Level Design
High Level Design
Our
initial design for the postage meter was as in the picture below:
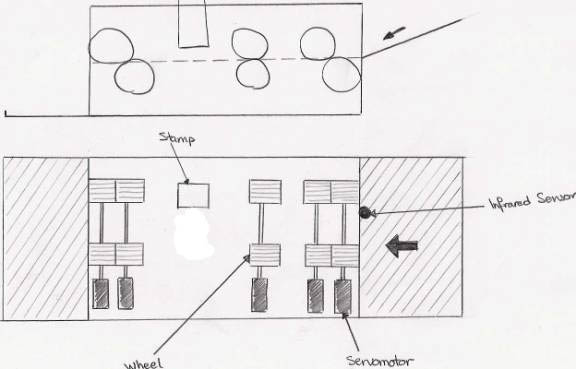
To
move the paper through the postage meter, we used three stepper motors rotating
six plastic rods. The motors were connected to the rods via aligned 3 two-gear
sets. The rods touched the paper by some rubber tubes to maximize the friction
between the paper and the rods. We used stepper motors instead of servo motors
because of their high precision in stepping. Stamping was done by turning on
and off two solenoids, which moved the ink stamp up and down.
Postage
Meter works in the following fashion:
![]() The user places envelopes in the tray.
The user places envelopes in the tray.
![]() User input is obtained from the keypad.
Envelope size (1, 2, or 3 –these sizes can vary, depending on the calibration
results) and the number of envelopes to be stamped are entered.
User input is obtained from the keypad.
Envelope size (1, 2, or 3 –these sizes can vary, depending on the calibration
results) and the number of envelopes to be stamped are entered.
![]() The front and central stepper motors start
turning together to align the envelope with the stamp.
The front and central stepper motors start
turning together to align the envelope with the stamp.
![]() The solenoids release the stamp and pull it
back after 3 seconds.
The solenoids release the stamp and pull it
back after 3 seconds.
![]() The central and rear stepper motors start
turning together to throw the envelope out of the system.
The central and rear stepper motors start
turning together to throw the envelope out of the system.