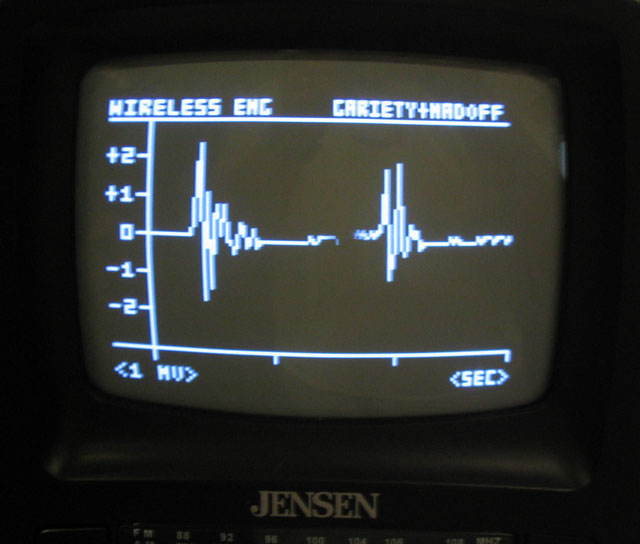
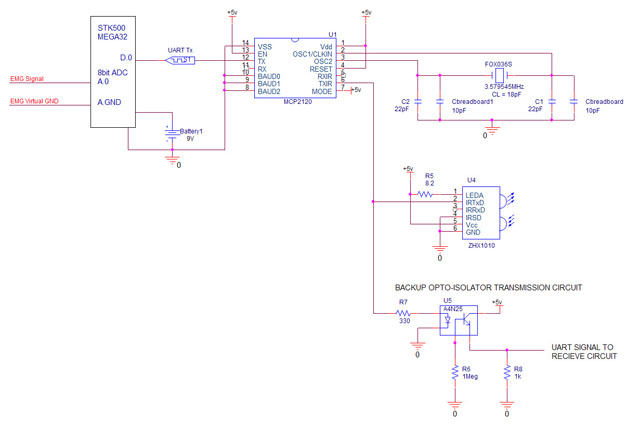
ECE 476 Final Project: Wireless Electromyograph
Arthur Gariety (ajg47) and Benjamin Madoff (bsm24)
|

|
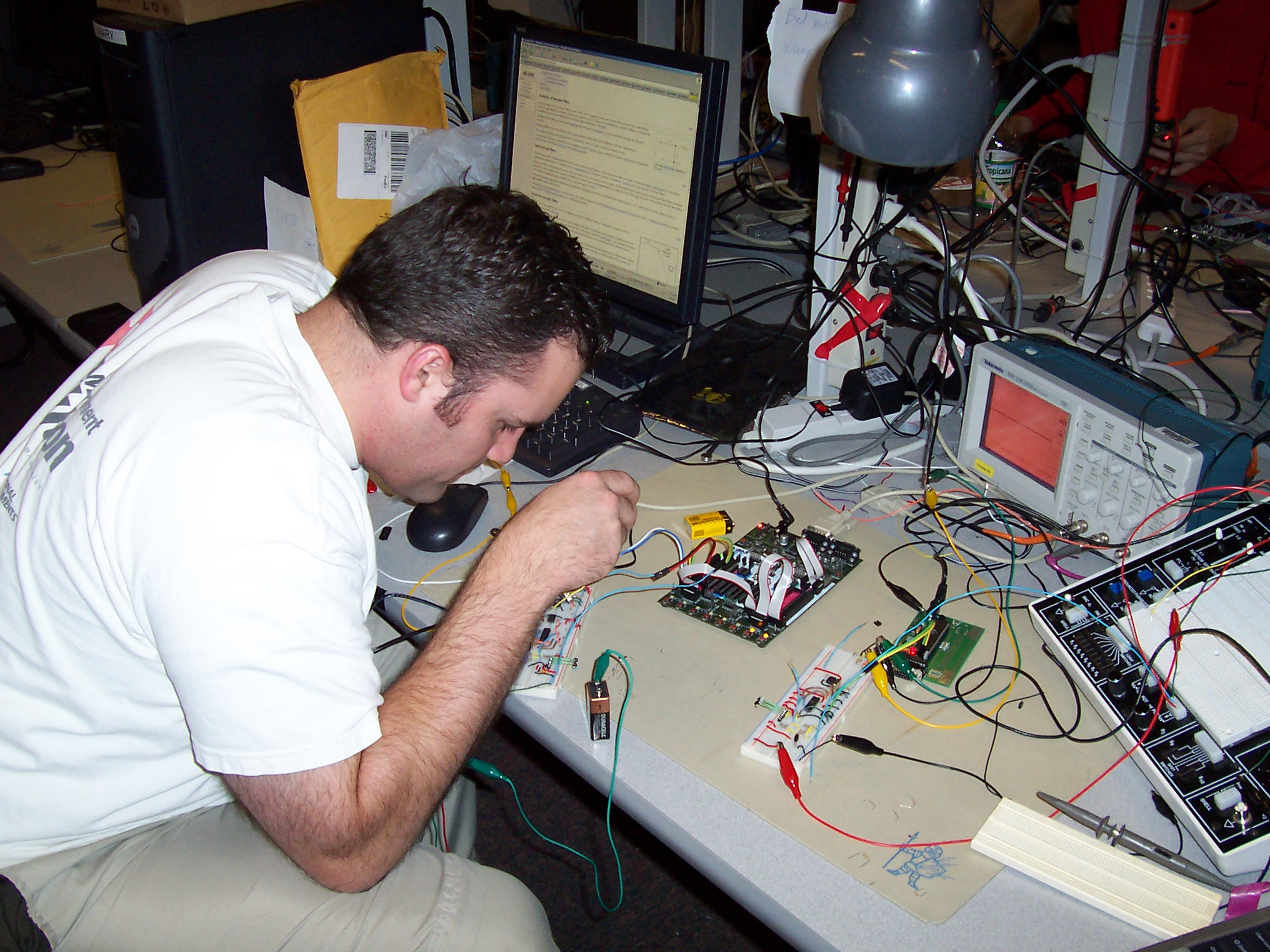
| Arthur Gariety, from Sandia National Labs doing his M.ENG here at Cornell, testing the circuit | Ben Madoff, junior electrical engineering major, biomedical engineering minor, hooked up to the EMG |