| Introduction |
|
High Level Design |
|
Hardware Design |
|
Software Design |
|
Results |
|
Conclusions |
|
Appendix |
 |
|
|
Introduction The project involves an experiment in implementing a human-computer interface by tracking finger and wrist motions. Brief: "Ever wish you could control a computer just by moving your fingers or your hand?" We did. The primary goal is to design and build a functional prototype implementing an intuitive interface for a user to interact with a computer (or computing device). The MCU provides a control module for direct access to the sensors and currently acts as the computer role of the human-computer interface. To demonstrate the interface, some sample demo applications include:
Return to the top of the page High level design Rationale: The project idea initially involved a robot to output a raster on sidewalk. Then it involved a portable multiplayer gaming device. Then it involved a virtual keyboard / abacus. Finally, it evolved into the current project. One of the ECE 476 assigned readings, "Synthetic Serendipity", features a device which uses gestures and body motions to interact with a wearable computer - We immediately realized that it would be very possible create such a Human Controllable Interface (HCI) with PVDT film.
We focused on the interface aspect because computer interfaces have not changed
drastically in over 30 years (since the mouse and its cousins touchpad,
trackball, and thumbstick). A major obstacle to ubiquitous and portable
computing is the intrusiveness of computer interfaces. Previously, the size and
awkwardness of computers presented the major obstacles to portability. However,
with today's technology, it seems that today's primary obstacle is the lack of
an intuitive and convenient interface. There are two main goals to this project.
The project high level design involves several modules: 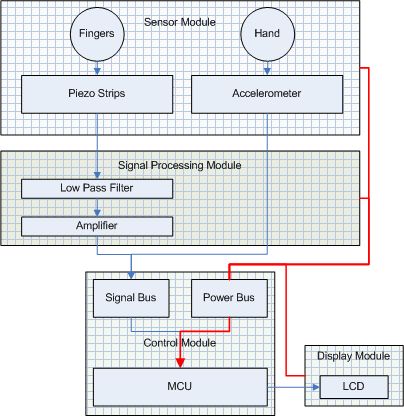 The sensor module is responsible for reading the fingers and hand. The signals feed into the signal processing module which cleans up the signal and amplifies them for the MCU in the control module. Finally, the output pipes to the LCD inside the display module. Background Math
The equation for the frequency response of the low pass filter is:
The gain of a non-inverting op-amp is equal to:
On the hardware, we were unable to obtain a 3-axis accelerometer (which would
allow up-down motion detection) from Kionix. However, since the gesture sensing
is the primary focus, a 2-axis
accelerometer
sampled from Analog Devices provides adequate functionality.
On the software side, the limited memory on the MCU prevents us from implementing any long and complicated programs. This requires a systems programming mindset focusing on specialized code and design simplicity. Standards, Trademarks, Copyrights, and PatentsThe device software is ANSI C compliant as much as the Codevision compiler allows and does not infringe on any trademarks or copyright... There are patents for gesture input systems such as the electric field sensing but none of them use piezoelectrics for sensing motions.
The device may seem similar to the
Nintendo Power Glove but there are a few differences. First, the Power
Glove uses optics and light intensity to gauge finger bend while this device
uses piezoresistors. In addition, the Power Glove does not sense hand motions. Hardware Design The whole device is mounted on a lycra glove from Campmor and a martial-arts arm guard. Lots of electrical tape and duct tape is used to reinforce different wires and cover the device. There are three main non-MCU hardware components: Sensor Module The heart of this project is the sensor module. There are two main sensing mechanisms inside the sensor module.
Piezoelectric materials deform when subjected to an electric field and produce an
electric charge when mechanically deformed. The equivalent electrical circuit
is an AC voltage source in series with a capacitor. Thus, these materials can
be used as mechanical sensors by analyzing the voltage change across the film
to deduce the deformation of the film. The voltage spike is in response to
a changing mechanical stress and not to the absolute stress, essentially
acting like a dynamic strain meter. However, by adding in a capacitor, the
charge can be stored for a longer time and make it so that the charge generated
is proportional to the absolute stress. These properties are the basis of the
finger-sensing scheme.
Piezo films are laid across the fingers and taped down to ensure a proper
response from the piezo. However, the current generated by the piezo is very
small. If the piezo is just connected to a voltmeter, the voltage spike is on
the order of 3 - 5 V. When the piezo is connected to other resistive elements
such as the rest of our circuitry, the voltage spike drops down to 0.3 - 0.5 V
so signal is amplified in the signal processing module.
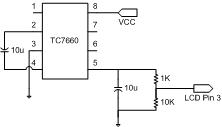
A 2-axis accelerometer from Analog Devices is mounted on top of the hand to tracks left-right and forward-back hand movement. The accelerometer is taped down to prevent shifting. Unfortunately, we were unable to obtain a 3-axis accelerometer to allow for up-and-down movement. The Analog Devices accelerometer, ADXL203CE, has a range of +-1.7 g with a sensitivity of 1 V/g. This allows the accelerometer to be used directly without amplification. In addition, the accelerometer has a resting state voltage of about 2.3 V. Signal Processing ModuleThis stage amplifies signals from the piezo strips. The schematic for amplifier is displayed below. 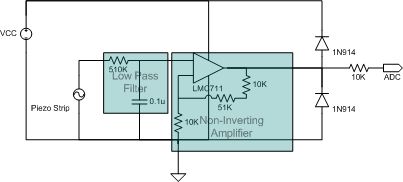 This amplifier has a gain of approximately 7 and is enough to ensure that the signal ranges from 0 to +5 V. A low pass filter with a frequency response of 3 Hz filters out noise. The frequency response is fast enough since it is unlikely that someone will move a finger more than three times a second. Diodes are placed at the input to the ADC to protect the MCU. The signals from this module feed into Port A on the MCU. Display ModuleThe third non-MCU hardware component is the Optrex DMC20481 4x20 character LCD.
The LCD is similar to the LCD that used in class (uses the Hitachi 44780
interface), but there are two main differences. First, the LCD has a backlight
(which is not used). Second, the LCD needs a -5 to 0 V input to the contrast
pin with -5 V being all black (full contrast) and 0 V being no contrast.
 Return to the top of the page Software Design Software development for the project focuses on building a very basic (single-
threaded) operating system to provide a foundation for small applications. It
presents the applications with a small API for interfacing with the gesture
sensors and performs some necessary device functions. It also provides a simple
GUI for displaying a menu for launching the applications. Results Overview The device is able to read inputs from the fingers and the hand. We are able to cycle through the menu options, run different applications, and reset the system without much problem. The device does not feel excessively bulky or uncomfortable to wear for short periods of time. The software infrastructure functions correctly and allows us to add new applications to the system. Overall, we are satisfied with the project. However, as always, it would have been nice to integrate greater functionality and streamline the design. Speed
The MCU runs at 16 Mhz. We experienced no problems with slowdown or artifacts
while running any of the applications. In general, there are no time-critical
programs except for input polling currently in this device so speed is not a
crucial factor. Note, this device should probably not be used for hard real
time systems, at least not in its current form. The code would need to be tweaked
for any real-time application.
Finger and hand sensitivity can be easily changed for each person by modifying
the thresholds for each input inside the OS. We have found that our default
thresholds have been adequate for most people. Most false positive inputs were
due to a twitchy finger or hand. Excessive false negatives is fixed by modifying
the sensitivity. These settings must be calibrated.
Safety is a huge concern for us since we are mounting an electronic device on top of the arm. To ensure that the device is safe to wear, we have done the following things:
Our device does not interfere with the operation of other devices (no RF,
minimal CPU noise). There might be some slight danger to people with electronic
pacemakers or other highly sensitive life-saving equipment.
If anything, our device can be integrated into other Atmel MCU based projects as an input device. Alternatively, other programs can be integrated into the device. UsabilityThe device is usable by most people. Currently, the device is right-handed only, but it can become left-handed by flipping the orientation of all the different boards around and finding a left-handed glove. The large amount of #defines in the operating system allow for customization to fit most people's needs. Furthermore, we have tested the device with multiple people and the defaults were adequate for them, but the option exists for fine-tuning. NotesA RS232 interface was originally planned, but we simply ran out of time to fully integrate it into the OS. The hardware capability is already on the chip, but the software to integrate it to the OS is not. However, the code should be trivial for a motivated developer to produce. Return to the top of the pageConclusion We feel that the device was a success. We were able to create a usable interface and a module system for easy integration of applications. The glove functions as expected and has a wide range of customizable options. It is unfortunate that we were unable to fully integrate the RS232 connection, but that was a minor feature. It would have been nice if we would have been able to fine/create packaging for the circuit boards with a cover for the LCD, but that is also beyond the scope of our original intentions. Our design does not use any standards nor does it reuse someone else's design or code or intellectual property. We were fortunate to not have to sign any non-disclosure agreements (NDA) to receive any of our sample parts, nor did we ask for any parts under false pretenses. There is a possible patent opportunity in this device. After we had conceived the initial device and were researching similar devices, we could not find any piezo-based gesture input devices. Seeing as how there were patents for specific types of gesture devices and not the general category, and further seeing no applicable patents, we can conclude that it might be possible to patent this. IEEE Ethics
2) There is no possibility of a conflict of interest. We do not work for nor
own stake in any of the companies mentioned. In addition, all of this work is
freely available.
Appendix Code Listings
Gary Hsu:
Pictures  Accelerometer on top of the glove 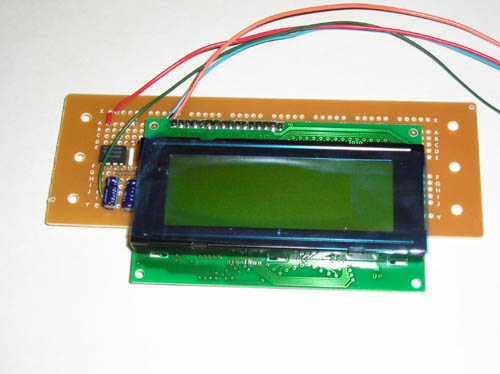 LCD circuit 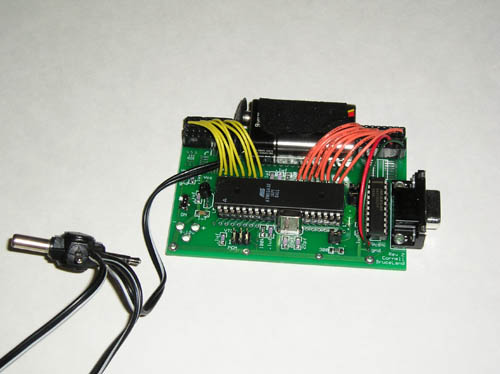 MCU circuit 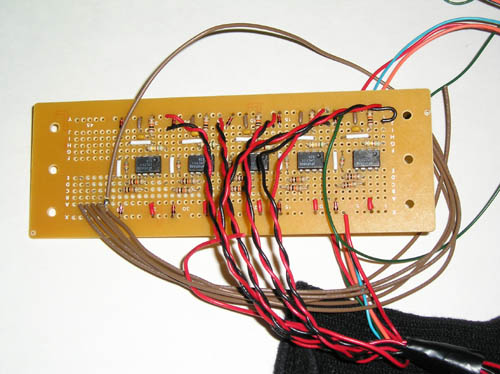 Op-amp circuit for the piezos 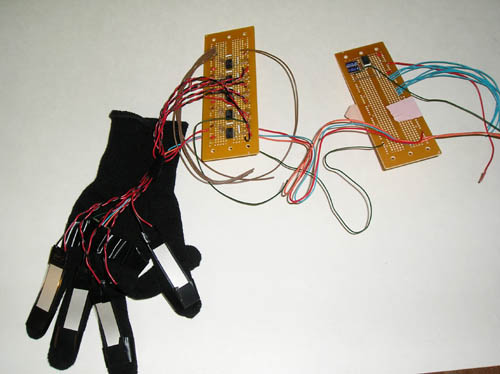 Everything laid out  Mock up with the covering glove 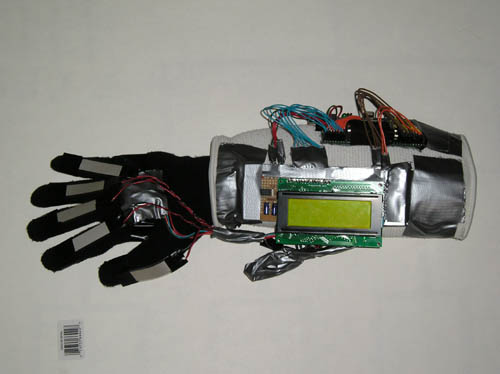 Everything done! Piezos exposed 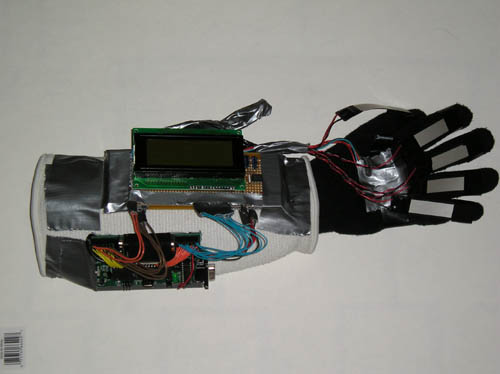 Different angle of the completed project without the covering glove  Glove with LCD on 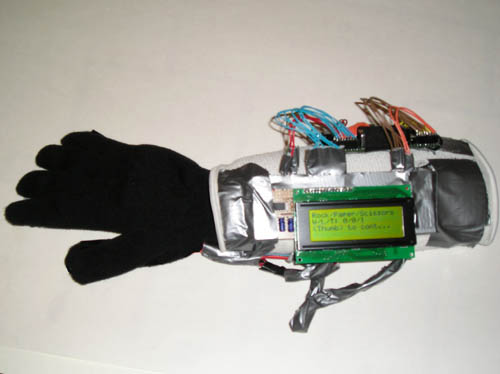 The finished project with the second glove covering and more duct tape Notes:
Analog Devices (accelerometers) Optrex (LCD character module) Kionix (almost an accelerometer) Campmor (Lycra gloves) Maxim (RS232 level controller) Renton Company LLC (LCD) CodevisionAVR Spec sheets for parts TC7660 Optrex DMC20481 LCD Analog Devices ADXL203CE accelerometer Atmel Mega32 MAX233CPP RS232 LM7111 op-amp Atmel Mega32 Protoboard Thanks to:
|
|