ECE4760 Project: Tic Tac Toe with CMOS Camera

Paul Cheng (pc389)
Fei Sun (fs256)
Introduction
Using computer vision and rules for a ��perfect tic tac
toe game��, we have built a system that would never lose in a fair game (i.e.
marking 1 cell per turn) of tic tac toe.
The idea is simple, have a camera driven Mega644 system
that detects for changes on a Tic Tac Toe board, figure
out the next move, and not lose a single game ever! The motivation for this
project is to test the computer vision code we learned last semester and try to
incorporate it on a real time microcontroller. Also, most of the projects from
the previous years used the same camera module but did the calculation on a
desktop PC, this project will try to keep everything simple on the built in 4kB
memory and be as autonomous as it can.
Having a successful outcome is a great proof of concept
for running computer vision algorithms straight from the MCU and may open
opportunities up for interesting future projects.
High Level Design
Rationale
The rationale behind the idea of
this project is based on a computer vision algorithm on detecting changes in
images; the algorithm focuses on the different features between the still components
and dynamic components in consecutive images. Generally speaking, the idea of ��motion
detection�� is basically to subtract the ��static background�� from the current
frame. There are many applications developed based on this algorithm. However,
to implement it on the MCU with limited data memory provides a real challenge.
We designed our project around images that are 36 x 36 pixels. The reason why
we used this resolution is because we need at least two image frame to compute
the difference; through simple calculations, one can see that that using 2 x (36Byte
x 36Byte) =2.6kB of the 4kB data memory is approaching the MCU��s limit and any
images larger than that may affect the overall performance of the system
drastically.
Logical Structure
This project relies on two main
components �V computer vision code segmenting the user��s input, and code to
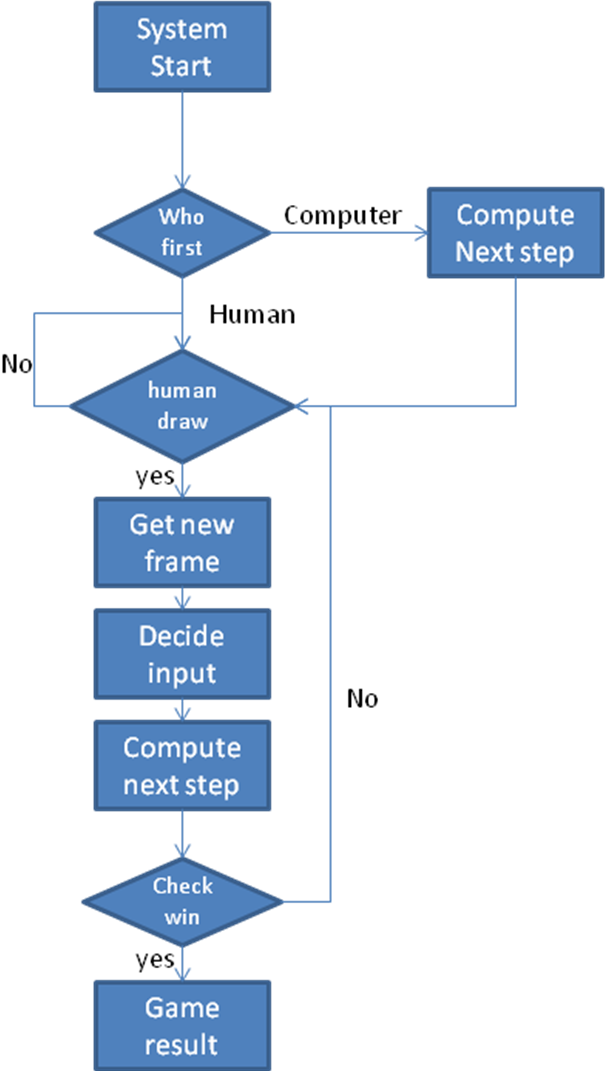
compute the next move given a particular situation. Below is a flowchart
depicting the overall process of our system:
High Level Flowchart of the Project
The high level flowchart of the
project first generates a ��background�� frame that is the average of the
previous frames, it then takes the current frame and computes the difference
between that and the background, and decides on the position of the new object
in order to return the next move made by the computer.
The background math involved in
segmenting the new object is simple: we divide the window into 9 regions, each
contains 12x12 pixels, we then take the difference between the current frame
and the background and sum the total pixel value inside each region; if the
pixel value is above a certain threshold, we say that the region is filled by
the user in the previous move and sets that cell in our program to a value
corresponding to an user input.
Once the user input is detected,
the program passes the current state of the game into the Tic-Tac-Toe (TTT)
algorithm, which will be explained in more detail later on in this report.
Hardware/Software Tradeoffs
Once again, the size restraint
on the Mega644 is the main bottleneck for this project. This constraint made us
down sample the already small 356x292 image from the imager. Lowering the
resolution into 36x36 arrays made it possible to store and run computer vision
codes on the MCU; however, losing 95% of the image was bad for the accuracy of
the system but was necessary due to the limited chip memory.
Program Details
After
the computer sets the user input, it computes its next move using the following
logic priority: look for a spot to win in one move, look for a spot such that
the user would win in one move, look for a spot such that the user would win in
two moves, look for a spot to win in two moves.
The
check for the computer to win in one move is done by using an exhaustive search
that creates a temporary TTT array with a probable next move in cell i, check for the winning condition, if
the result is not a win, move through the rest of the empty cells.
The
check for the user��s next move is very similar to the previous step, except the
algorithm now creates a temporary file with a probable user move in cell i, check for the winning condition, if
the result is not a loss, move through the rest of the empty cells.
The
next check looks for patterns that would lead to a win or a loss in two moves
(patterns that leads to a ��fork��, when there are more than one cell to win
with).
Main Functions Used:
void init_mcu(void) �V initializes all the variables
used in the program
void init_uart_tx(void) �V initializes the
registers for RS232 communication
void camera_write(unsigned int reg, unsigned char value) �V writes to the
camera��s build in registers using TWI
unsigned char camera_read(unsigned int reg) �V reads from the camera��s registers using TWI
void getnewFrame(void)/void getHistory(void) �V reads from the ADC��s
of the camera, compresses the image and saves the values in the appropriate
arrays
void calibarate(void)/void calibaratenew(void) �V computes the
average of the past 2 frames to obtain a static background image.
void cameraSetting(void) �V initializes the camera for image
acquisition.
void getImageTest(void) �V creates an 36 x 36 image with no
mean filter applied
void getCenterPoint(void) �V computes the center of moment
based on the pixel value of the image
void getDifference(void) �V computes the absolute
difference between the background and the new frame.
unsigned char computeBlock(void) �V computes the location of the
cell with the new object placed
char checkWin(unsigned char* T) �V checks for the status
of the game, possible outcomes are: ��3�� = computer wins, ��2�� = player wins, ��1��
= game continues, and ��0�� = tie.
char nextStep(unsigned char* T) �V computes the next step for the
computer. It first looks through immediate win/loss and then calls twoMove to
check for common patterns. If no result is given, it goes to the first
available cell.
char twoMove(unsigned char* T) �V looks for preset patterns and
returns the next step if found, otherwise returns a ��9�� = no solutions found.
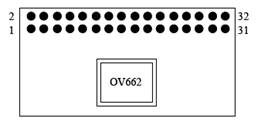
Hardware Details
The
hardware setup for this system is relatively simple; it involves a C3088 board
with an OmniVision OV6620 CMOS camera attached to it. The output of the camera
is attached to portA on the STK500, with timing signals (HREF, VSYNC, PCLK) attached to portD, and I2C lines hooked to
the TWI lines on portB.
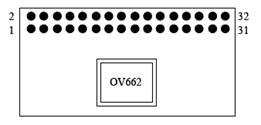
The
following is the pin layout (top view) on the C3088 module and where they
connect to on the STK500:
|
Pin Layout on the C3088 module |
|
Pin connection between C3088 and STK500
Reference
Our code uses the camera library
wrote by Ruibing Wang in codeVision. This was needed to write into the camera��s
registers to adjust the frame rate, white balance, video mode of the camera.
The name of this library is ��twi_master.h��.
The
algorithm for Tic Tac Toe is a combination of the
algorithm from ��Tic Tac Toe (to Death!)�� and the ��Strategy�� section from the
article on Tic Tac Toe from Wikipedia.
Things that Didn��t Work
The
original goal of this project was to make a automated
darts scoring system using computer vision algorithms. But due to the memory
and optical constraints of the camera, we decided that it was not feasible to
implement a system that only tracks darts in a 5cm x 5cm area.
Since
we did all our labs using the gcc compiler, we took the libraries written in
codeVision from the previous years and tried porting them to work under gcc.
However, we were not able to communicate with the camera through the TWI
interface under gcc, all the signals looked correct on the scope but failed to
write into the register. We then tested the original codeVision library and
confirmed that our camera was working properly. After a week of trying, we
ended up moving our development platform to codeVision and utilize the existing
working library in order to focus our effort on the main goal of our project.
Several
algorithms were implemented and tested before the change, namely the code that
finds the center of moment in the captured image (originally used to find the
bull��s-eye are the dart board), the code that finds the center of moment for
the regions with the greatest change (originally used to find the location of
the last thrown dart), and the code that computes the distance between 2
locations using pixel location and conversion factors.
We
originally planed to have the camera hovering over the drawing area, this
proved to be very error prone and it was very hard to reproduce the exact test
results. The finalized version has the camera pointed upwards at a patch of
clear tape, where we would draw on the other side using dry-erasable markers.
This eliminated the problem we had with setting up the camera before each game
and the uneven lighting/shadow problem and gave more accuracy to our result.
Results
According
to the Wikipedia article, the starting player wins ~66% of the possible 138
scenarios, loses ~31% of the time and ties ~2% of the time. However, if the
player follows the set of strategies used in our algorithm, the worst turn out
would be a tie and he/she should never lose.
The
speed of the execution is greatly influenced by the number of pixels used,
since the number of pixels is proportional to the speed of the computer vision
algorithm. In general the algorithm takes about 2 seconds to read in the image,
compute the changed region, and compute the next step it takes.
The
usability of this project should be intuitive to everyone who has played the
game before. Automatic sensing of the user input and outputting the next step
on to a LCD could not be included by the end of the project, but would be very
nice to have to make the project more autonomous.
Out
of all 9 possible steps, 7 of them are almost always correctly detected. Positions
0 and 6 sometimes goes into other cells, this should not affect the gaming
experience too much and should be tweaked if given more time.
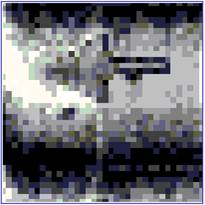
Below
are some images we acquired throughout the project:
|
Image used to determine the
orientation of the camera |
The 3 x 3 grid seen by the camera
(filled with 9 blocks) |
|
|
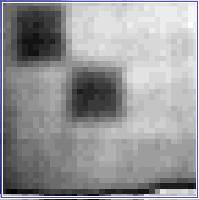
Grid with 2 blocks on (background) |
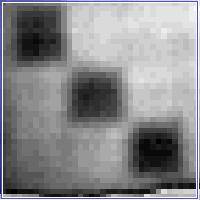
Grid with 3rd block added on (current
frame) |
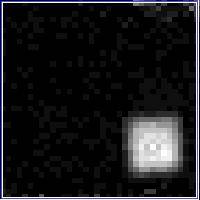
The result of the current frame
subtracted by the background |
Conclusion
Results vs. Expectations
We
spent a majority of our time trying to write a library for reading from and
writing to the registers on the OmniVision camera. This had to be done because
all the projects involving the cameras were done on codeVision and not gcc. We
spent about a week of our time trying to get it all done under gcc using the
camera library from the previous years written in codeVision but kept getting
status errors. We validated this with an oscilloscope but did not think we can
resolve this in time. At the end of the week we decided to go back to the
working codeVision library in order to have our project completed in time.
Due
to the field of view of the camera, we were only able to place the camera ~10cm
above the target (FOV = 5cmx5cm), anything further would result in noisy images
that stops the detection algorithm from working properly. This is mainly due to
the data storage constraint we have (4kB data on mega644), which made us
decrease the resolution of the stored image down to 36x36 pixels. If we were to
do this project again, we would have incorporated an external RAM module to
accommodate for the image data and perhaps improve the result of our algorithm.
The
outcome of this design proves the concept of programming computer vision
algorithms on an MCU; however, the constraints on the memory greatly limited
the scale of our project, making it a lot less applicable than we intended.
Intellectual Property
Considerations
The
only code we reused was the previously mentioned library for TWI interfacing
with the camera��s registers. This was done by Ruibing Wang and used in other
previous projects using the C3088 camera module.
No
code from the public domain was used for this project. All of our design were done using knowledge from the labs as well as
other courses.
Potential
patent opportunities for this project seem low, as the goal can probably be
solved more easily and robust using pressure sensors. However being able to
perform computer vision algorithms on a microcontroller level may provide a
good starting point for projects such as a low budget auto tracking camera.
Ethical Considerations
All
the lines on the IEEE Code of
Ethics were followed throughout this project. No one��s personal safety was
compromised during any part of this project. The only conflict of interest we
perceive with this project is that we are building a project that will at worst
tie the human player and may hurt the player��s feelings. Since the project��s
TTT algorithm is autonomous, no bribery will change the game��s result in
anyway. The goal of this project was to test out the computer vision algorithm
we learned last semester on real world applications; this follows directly with
line 5 �V improve the understanding of technology and its appropriate
applications and potential consequences. Since the goal of our project was not
fully defined at the beginning of the semester, we followed line 7 and took
note of all the constructive criticism we received with regards to the focus of
the project. This system is designed without bias towards any ethnic groups; it
will treat all players equally and play fair games. The relationship between
line 3, 6, 9 of the code and our project did not occur to us at any point, but
would have been resolved if they conflicted with project development. Lastly,
we would gladly help anyone with their project if they seek assistance.
Legal Considerations
None
of the code or parts used infringes any intellectual property laws. All code
developed by others are documented and the rest were all made and designed by
our team.
Appendix A �V Commented Program Listing
Appendix B �V Schematics
{kind=link}
{kind=link}
Appendix C �V Parts List
Appendix D �V Work Distribution
|
Paul
Cheng l TTT algorithm coding l Parts acquirement l Hardware connection l Final Report l Website constructing |
Fei Sun l
TWI library implementing l
Computer vision algorithm
coding l
Code integration l
Final Report |
References
Data sheets
OmniVision OV6620 optical sensor
Vendor sites
Code/designs borrowed from
others
"Customizable Virtual Keyboard" by Naweed Paya and Venkat Ganesh
Background sites
Tic-tac-toe - Wikipedia, the free encyclopedia
Paper Used
Maddalena, L.; Petrosino A., A Self-Organizing Approach to Background Subtraction for Visual Surveillance Applications, IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 17, NO. 7, JULY 2008.