"Glasses...with Lasers!"
project soundbyte
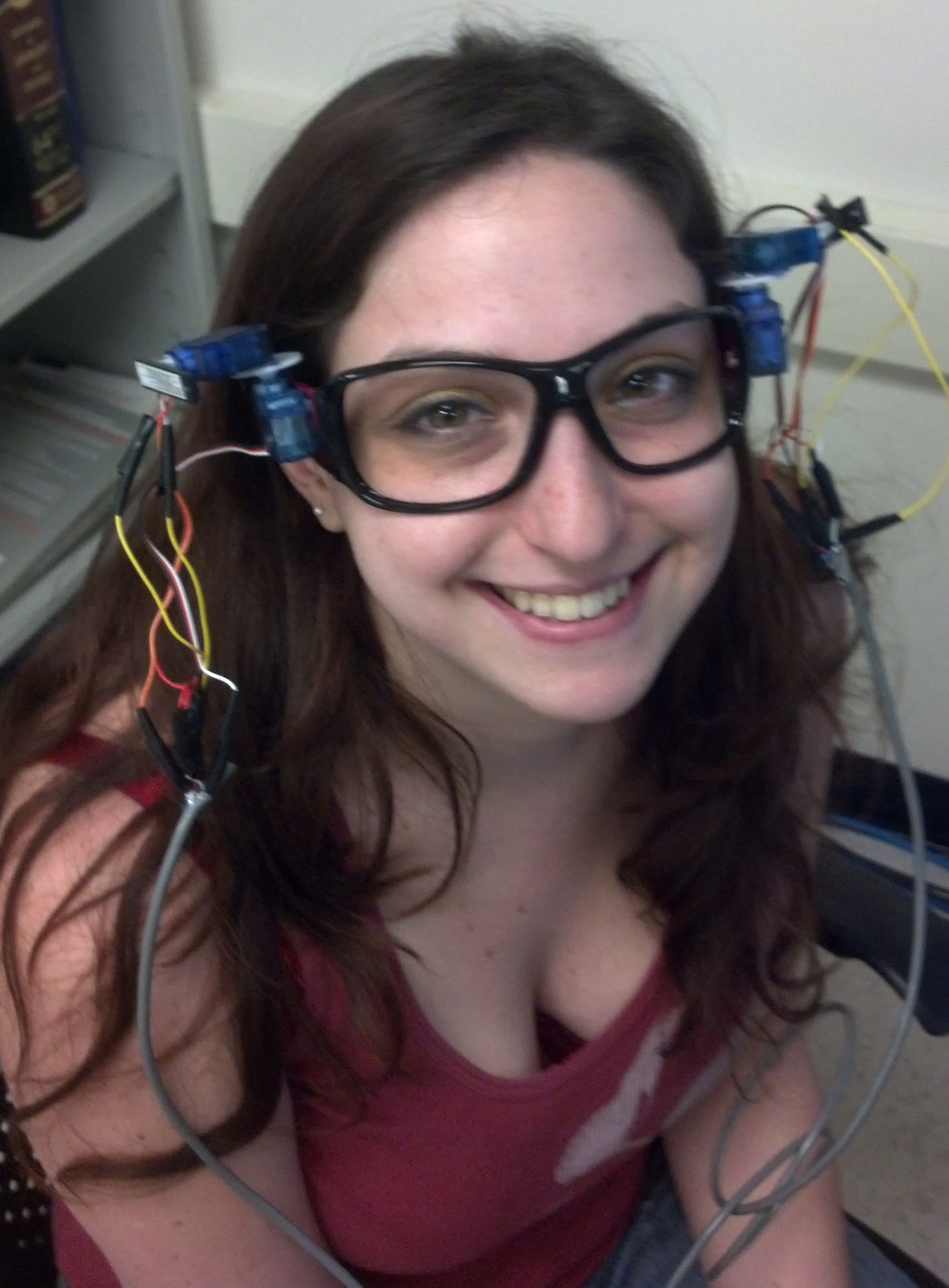
We have developed an instrument for performing a visual field test built into a pair of glasses. A visual field test maps out a patient’s visual field including peripheral vision and blind spots, and is useful for the diagnosis of several ocular and neural degenerative diseases including glaucoma, stroke, and brain tumors. Existing devices are bulky and expensive. We were able to create a low cost, portable version of this tool which makes it more accessible to doctors both here in the USA and in less developed nations.
The final product.
High Level Design top
Rationale and Source of Project Idea
This design was inspired by looking through suggestions of project ideas on the ECE 5030 course website. We discovered a link to a lab used in a bioinstrumentation class at the University of Utah regarding visual perception experiments. Their project involved designing an astable miltivibrator circuit to blink an LED at a variable rate. This device was then used to measure the visual fusion rate, the fastest frequency of blinking that could be observed before the light appeared to be continuously on, and to observe differences between the perceived blink rate at the center and periphery of the visual field. Upon further research into visual perception experiments, we discovered another lab from a course at Stanford University which described techniques for measuring peripheral vision and locating blind spots by having a partner move their finger or the tip of a pencil along a plane parallel and approximately 1-2 feet from the observer’s face until the observer can no longer see the object. With these ideas in mind, we set out to make an automated device which could measure the difference in peripheral vision for different blink rates and map the location of blind spots within the field of view.
Our device is an example of an automated perimeter, an automated device which can measure field of view. Measuring the visual field is an important tool for detecting glaucoma and other ocularly degenerative disorders because they are often caused by damage to nerve fibers in a particular location and distribution in the eye. There are several different techniques currently used to measure peripheral vision. The simplest is the confrontation technique, during which the optometrist simply sits across from the patient, asks them to cover one eye, and then holds up a variable number of fingers in the patients periphery. While this technique is extremely inexpensive (free!) to implement, it is not very precise and may only indicate that further tests are required to diagnose any possible issues. The tangent screen is a more sophisticated perimeter which can measure the angles to the edge of the visual field more accurately, however these devices are usually large, expensive, and uncomfortable for the patient. The patient rests their face against a chin rest while the technician moves an object around a hemispherical dome to measure the field of view. The most common iteration of this design is the Goldmann-type projection perimeter (shown below), an automated device which projects a spot to various locations on a hemispherical screen.

Goldmann-type Projection Perimeter (photo courtesy of Carleton Optical)
We propose that by incorporating the device into a pair of glasses we can achieve the same accuracy of visual field measurements while making the experience easier for the patient and the equipment less expensive for the doctors.
Logical Structure
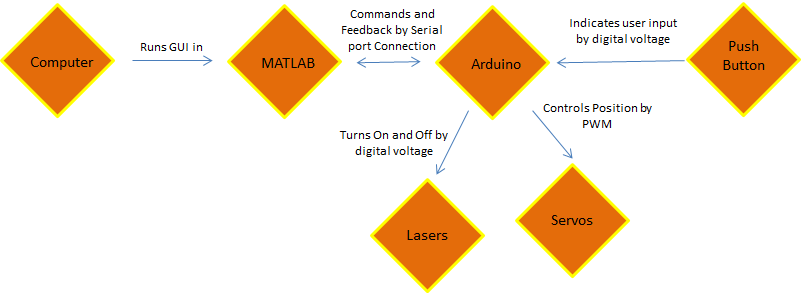
High-level block diagram.
Hardware and Software Tradeoffs
Other than the required hardware like the servos and lasers, everything was implemented using software. Although we originally considered implementing some features, the variable blink rate for example, using analog circuitry, we ultimately determined that it would be much more straightforward to implement our design using a microcontroller. Since our design required precise servo control anyway, using the microcontroller was definitely the simpler choice (which was important to consider due to our limited time limit). The Arduino model we used can be purchased for less than $10, so this did not significantly impact the cost of developing our design.
Existing Patents
Perimeter designs were first registered by the patent office in the late 1800’s when the tangent screen method was developed and used by Bjerrum and Ronne to demonstrate characteristics of visual field loss in glaucoma. Early designs measured along an arc which passed horizontally in front of the patients eyes. The arc later became a bowl shape, which allowed doctors to observe the off-axis field of view. The Goldmann Bowl, still the most common design used today, was patented in 1945. Since then, many patents have been issued for slight modifications to this design. While we were able to find some patents for portable perimeters (including one which folded into a suitcase) any that were automated were still large and meant to be used on a tabletop. We did not find any patents for an automated perimeter as portable as our glasses-mounted design.
Hardware Design top

Circuitry
Our hardware design is relatively simple because we chose to use an Arduino Pro Mini single-board microcontroller instead of a complicated analog circuit. The arduino is powered and connected to the computer through a USB FT232R breakout board from sparkfun.com. Four Dagu Micro servos are connected to digital PWM pins on the Arduino and are powered using a lab bench 5V DC power supply. Two 100 μF capacitors are connected between 5V and ground to reduce noise from the servos. Two of the servos rotate clockwise from 0 to 180 degrees, and the other two rotate counterclockwise from 0 to 180 degrees. One servo is attached with hot glue to each arm of a pair of sunglasses without lenses with the flywheel parallel to the floor. A second servo is mounted with hot glue on each of the horizontal flywheels with the new servos rotating in a plane perpendicular to the floor. The servos are arranged so that increasing the angle rotates the flywheel from the center to the edge of the field of view along the x axis and upwards for the y axis. Two .5 mW COM-00594 red laser card modules, also from sparkfun.com, are connected via TIP31 transistors to digital voltage pins on the Arduino through 1 Kohm resistors to limit the current and are powered using to DC power supply with a 3 V regulator. The lasers are hot glued to each of the servos which rotate in the vertical plane. The result is a pair of lasers mounted on glasses frames with two degrees of freedom along which they can scan. The wires from the Arduino to the galsses are bundled together through pieces of telephone wire with connector pins soldered to the ends to facilitate setup and operation of the device.
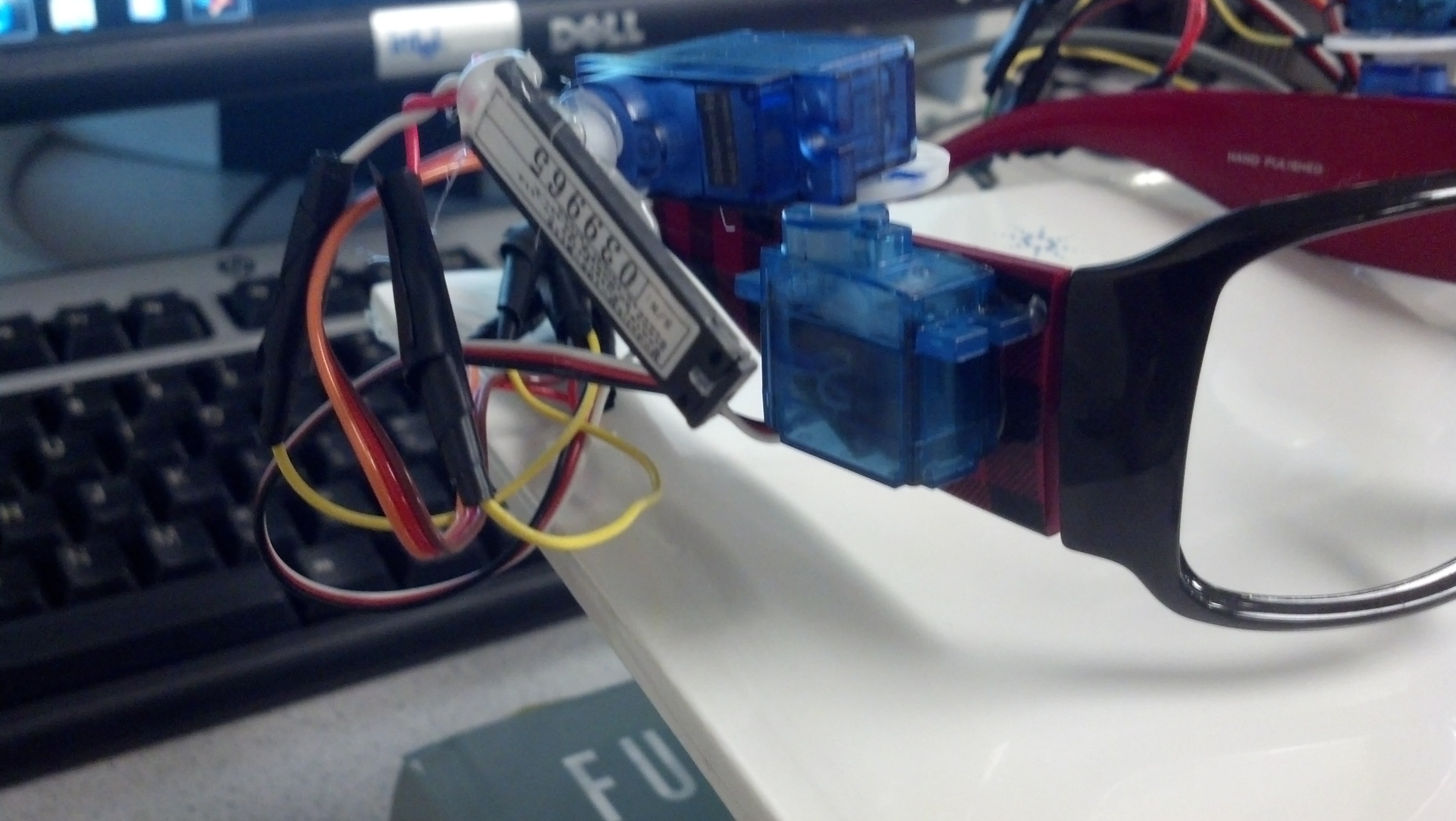
Close up of one arm.
Issues
We would like to note that we had a lot of issues obtaining a functional set of motors. In our original order we received 3 servos which rotated counterclockwise and one which rotated clockwise. Upon inquiry of why the four were not identical, we were sent a replacement which turned out to be defective (it drew a destructively high current of approximately .5 A). Ultimately we ordered 4 additional servos and asked for another replacement. In the end we were able to obtain 4 motors which functioned reasonably well and rotated the proper direction, however they seem to be worsening with use. The motors tend to click when positioned at the extremes, the motion is sometimes choppy, and one motor will walk the flywheel in a circle if ever set to zero. We definitely struggled with these motors and would consider a different model for future prototypes if one could be found with similar specifications.
Software Design top
Our program consists of two parts, one run in Matlab (perimeterGui.m) and one run on the Arduino (aglasses.ino), which communicate via serial connection. The Matlab portion contains the master controls, while the Arduino controls the servos based upon commands it receives from Matlab.
The Files
perimeterGui.m
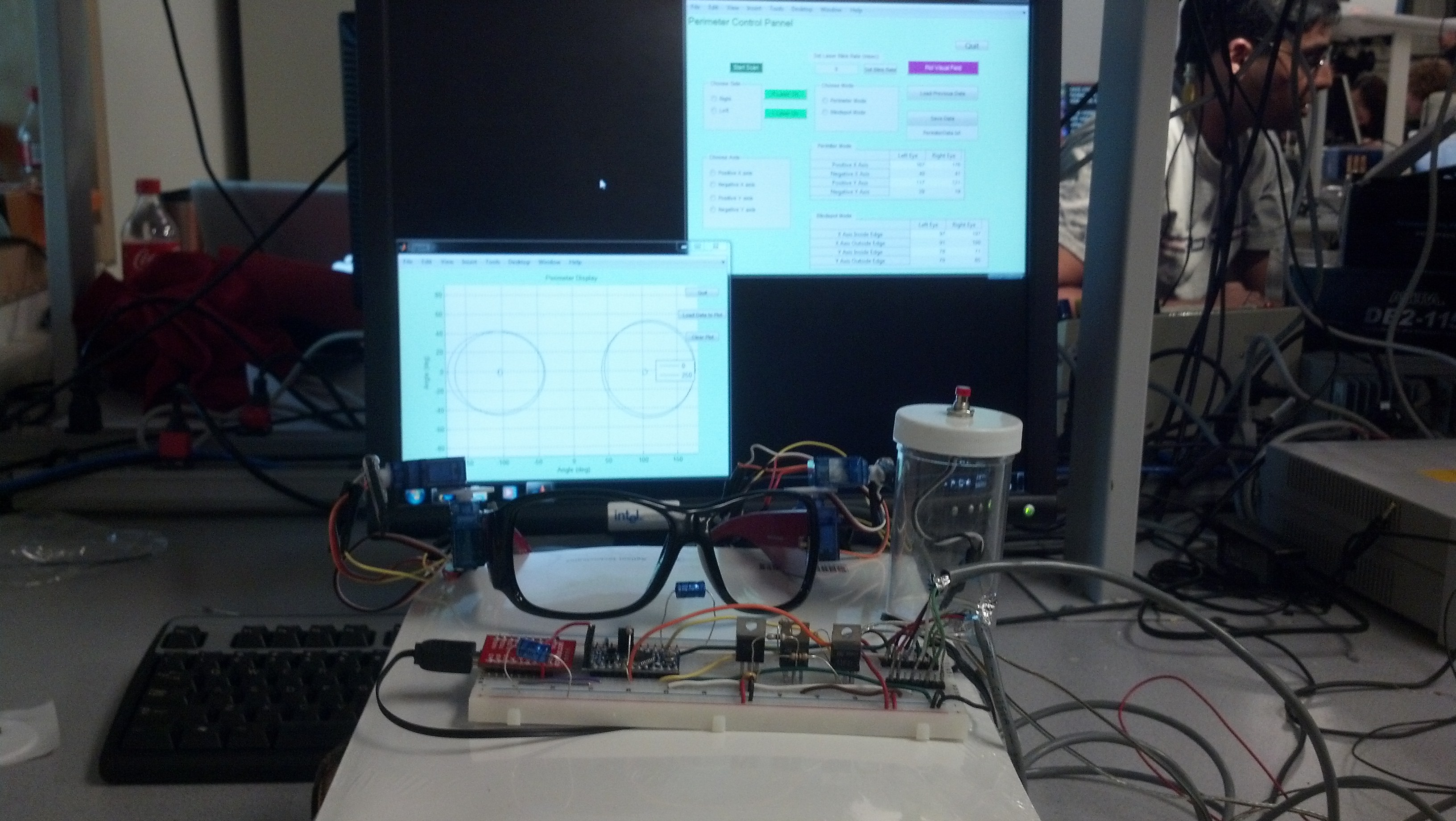
When the “perimeterGui.m” script is started, Matlab first establishes a serial connection with the Arduino, then opens the GUI window on the screen. Several controls are initialized on the GUI including buttons to turn the lasers on an off, “Quit” and “Start Scan” buttons, and three groups of radio buttons to choose the eye and axis to be scanned and to choose between perimeter mode (for peripheral vision) or blind spot mode. The operator can then control the Glasses Mounted Automated Perimeter entirely from this GUI window, which was designed so that the command line would be active while the program was running in case any commands need to be send manually. Two tables in the GUI window display the data as it is being collected, and the results can be plotted using the “Plot Visual Field” button.

Control Panel GUI
When the operator is performing the visual field test, they would collect data for each of the possible scans by choosing each possible combination of the radio buttons. We chose this design because it allows the operator to perform the scans in any order and repeat them as many times as necessary without having to restart the test from the beginning. Since the arduino reads one ASCII character from the serial buffer at a time, radio button selections specify the character values of certain Matlab variables to be sent to the Arduino. The first radio button group “Choose Side” sets a variable “side” to “R” for right eye and “L” for left to specify the eye being scanned. The second set of radio buttons is “Choose Axis” which allows the operator to choose between X or Y axis scans and the direction to scan from the center of the field of view (“P” for positive and “N” for negative”). The third group of radio buttons allows the user to choose between perimetry mode (“P”) and blind spot mode (“B”). When the operator presses the “Start Scan” button, the program first checks to make sure a selection is made in each radio group. If not, the program generates and error dialog box instructing the operator on how to correct their settings. MATLAB then sends a series of commands to the Arduino to move the specified motor in 1 degree steps every quarter second along the axis and direction indicated by the radio buttons. These commands will always have the form “.SA###” where the “.” indicates to the Arduino that this is a command it should execute, “S” is the side and will be either “R” or “L”, “A” is the axis and will be either “X” or “Y” and “###” is the angle the selected servo should move to. Upon sending each command, Matlab then waits to receive a character “r” from the Arduino indicating that it is ready to receive the next angle. This handshaking ensures that angles are not skipped because of buildup of the buffer or timing issues of communication through the serial port. This was the trickiest part to write because we had to adjust the timing of the communication until there were no glitches. In the end, there still seems to be a backup of commands in the serial buffer, however it does not affect the functionality of the device. When the patient presses the button indicating that they can no longer see the spot, the arduino sends a “b” instead of an “r,” indicating that the button was pressed, followed by the angle the servo was at. When Matlab receives the “b,” it stops sending angles to the arduino and records the angle received from the Arduino in the appropriate cell in the tables in the GUI window.
In addition to controlling the type of scan to be performed, each laser can be turned on and off independently with the green “R Laser On” and “L Laser On” buttons in the GUI window. For safety reasons, the color and label on these buttons toggles each time they are pressed. If the lasers are on, the buttons are red and are labeled “R Laser Off” and “L Laser Off.” When pressed, these buttons trigger Matlab to send a command of the form “.ZSON” or “.ZSOFF” respectively, where the “.” indicates to the Arduino that this is a command it should execute, "Z" indicates a laser command, “S” is a character representing the side (either “L” or “R”), the “L” indicates that this is a command for the lasers, and “ON” and “OFF” tell the Arduino which action to take. The lasers can also be set to have a variable blink rate so that the field of view can be measured with different blink rates of the laser. The blink rate is changed by ensuring that the correct side is chosen in the “Select Side” group of radio buttons, typing the desired period of the blink rate into the box labeled “Set Laser Blink Rate” and then clicking the adjacent button. This sends a command to the Arudino of the form ".ZS###" where ### is the blink period in ms.The selected period will only be valid for one laser at a time. Because of the way blinking was implemented, the Arduino cannot accurately control the blink rate of both lasers simultaneously.
The GUI window is initialized for the operator to collect completely new data, however they have the option to update previously recorded data. Previously collected data can be loaded using the “Load Previous Data” button, which brings up a dialog box allowing the operator to choose the .txt file containing the data they wish to update. There is also a “Save Data” button, which saves the data currently displayed in the tables to the .txt file named in the box below the button.
In order to display the data visually, we have included the “Plot Visual Field” button, which plots the data currently listed in the tables. When this button is pressed, a new window containing a plot is opened. In order to display the data, we approximate the visual field and blind spot of each eye as an ellipse defined by four points at the ends of the major and minor axes. An ellipse is drawn representing the borders of the visual field and the blindspot of each eye using the downloaded Matlab function “ellipse.m,” which is created and copyrighted by David Long, but is available for use as long as the license is retained with the code (see code appendix). Also in this window is a “Load Data” button which allows the operator to load multiple data sets simultaneously and observe them, and a “Clear Plot” button which erases all data currently on the plot. This script can also be run independently of the control GUI to observe perviously collected data while the perimeter is not connected to the serial port.
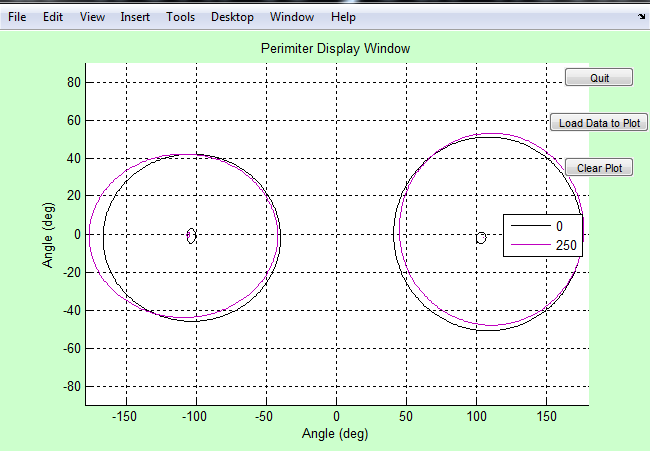
Data Plot GUI
Both the GUI window and plot window also contain a “Quit” button. When the button is pressed from the plot window only the plot window is closed. When the one in the GUI window is pressed, Matlab closes the serial connection to the Arduino and closes both windows.
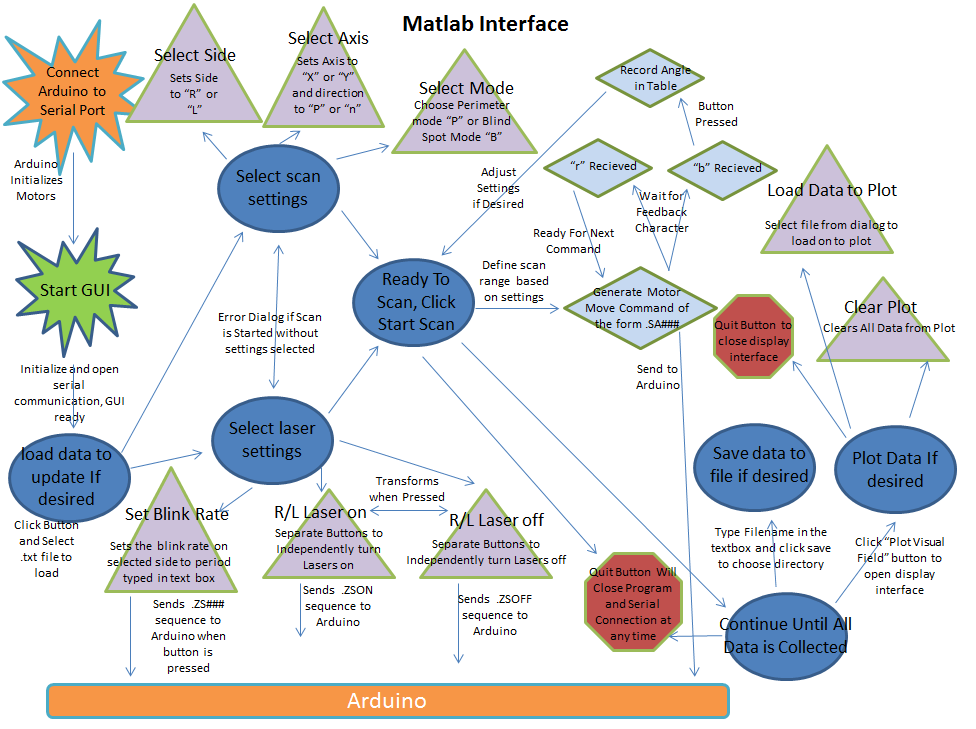
Matlab code structure
aglasses.ino
The Arduino code aglasses.ino serves as a hardware driver. The code loops endlessly while it waits for a command to be sent from Matlab over the serial connection of the format “.-----”. The ‘.’ is used so that any noise or junk data will not be followed as serious command. Available commands to the aglasses.ino include servo commands, laser activation commands, and laser blink commands.
“.RX###” is a servo command that will cause the right x-axis servo to move to angle ###. All servo angle commands follow this format where L can replace R and Y can replace X to control the left side and y-axis respectively. A delay is hard coded so that the servo has enough time to reach its destination angle before further commands will be heard.
“.ZRON-” and “.ZROFF” will turn the right laser on and off respectively; here R can be replaced with L to control the left laser. Actual laser states are altered in the main loop while waiting for a Matlab command.
“.ZR###” will cause the right laser to blink with a period of ### milliseconds; here R can be replaced with L to control the left laser. The current implementation of laser blinking is imprecise and works by waiting half of the period, then toggling the laser in the main loop while waiting for the next command from Matlab.
Upon receiving a command and executing the appropriate action, the aglasses.ino code will send Matlab a “rz” string followed by a “###z” string where ### is the latest servo angle set. The “rz” string will notify Matlab that the Arduino is ready for further commands and the “###z” string lets Matlab know the status of the servos in the real world. The ‘z’ at the end of the strings is the agreed Matlab terminator.
If the push button is ever pressed, aglasses.ino immediate halts whatever it is doing and falls into an interrupt service routine. In the interrupt, a flag is set to send Matlab a different string and the latest angle any servo was set to is stored in a secure buffer. The interrupt then ends and aglasses.ino resumes doing whatever it was doing before the interrupt occurred. The next string sent to Matlab is then “bz” followed by “###z” where the “bz” notifies Matlab of the button press and the “###z” string contains the saved angle.
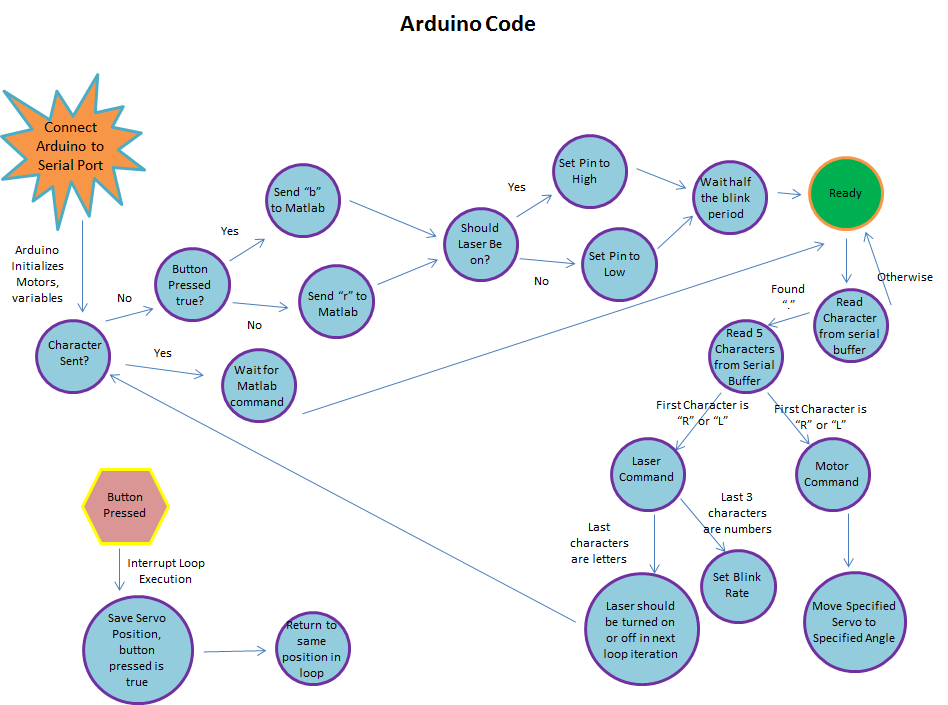
Arduino code structure
Programming Issues
The most difficult part of this project was controlling the timing of communication between Matlab and the Arduino. In our final program, there seems the be a delay of approximately 4 degrees between the angle MATLAB sends, and the angle the Arduino sends to the motors. The Matlab code seems to send 4 angles before the servos begin to move. After much exasperation, we are unable to determine the cause of this delay; in fact, it seems to disappear when we step through the code slowly. Fortunately, this does not affect the functionality of the perimeter. The angle recorded by the program is actually the position of the servo when the button was pressed and not the most recent angle sent by Matlab, so the delay has no effect on the results. Previously we also experienced an issue from sending Matlab commands to quickly. We overflowed the input buffer to the Arduino, which caused the servo to move to weird angles in the middle of a scan. We have since fixed this issue by clearing the serial buffers more frequently.
Testing top
Because the project was completed in stages, it was also tested in stages. When we were wiring the Arduino on the breadboard to accept programming through the usb interface, we attempted a simple blinking of the built in LED. Once the LED was blinking as the programming should have dictated, we knew the device was wired to the usb interface correctly.
The hardware is all directly controlled by the Arduino and so extensive testing was done after the rest of the hardware was wired. We found that not all of the servos behaved the same; some spun the opposite 180 degrees, but through the use of print statements and observing physical motion of servos we found all the proper control schemes.
After the hardware was settled, we needed to test Matlab’s ability to indirectly control things. The serial connection between the Arduino and Matlab was tested by sending a serial message to the Arduino and then sending that same message back to Matlab. We were unable to view the message until it returned to Matlab, because using the serial interface eliminated the Arduino’s ability to print to the control pane. Once the messages received by Matlab were the same ones it sent, individual commands were sent and were found to work as intended.
Once initial commands were functional, we began to send more complex commands in running a scan. By observing the physical servos on the glasses, we noticed that the angles displayed in the code were not the same as the angles the servo were physically at. This was confirmed and corrected for by sending additional information from the Arduino back to Matlab. Since the Arduino was actually setting the angle of the servo, its knowledge of the angle was taken to be true. Future work that depended on precise angles thereafter used the additional angle information sent by the Arduino.
Blind spot measurements were tested by the patient manually finding their blind spot and comparing that spot to the laser’s position.
Results top
Speed of Execution
Our design allows for one degree of servo motion every quarter second without any significant hesitation or periods of non-intentional inactivity. Based on our literature search, 4 degrees per second is considered the optimal rate for automated perimetry. Approximately 5-10 minutes are required to collect data for one patient, which is comparable to the approimately 7 minutes per eye for the Goldmann perimeter. Additionally our patient interface, the push button, is extremely responsive and stops the servos immediately, exactly as it should.
Accuracy
Our results are reliably precise; patients receive the same personal data after repeated testing. While the accuracy of the full range of view results could be tested via protractors, it was not verified. The blind spots however, were easily tested by simple means and verified. For one patient, the field of view was consistently significantly smaller for the left eye than the right eye. We suspect this is caused by a known difference in nearsightedness or possibly a known astigmatism in the left eye, however this has not been verified.

Collected data
In the above trials, the first data set is Patient 1, the next are Patient 2, and the final two are Patient 3. Among the same patient, the data between trials is well correlated. This shows that our device is precise in its operation. Note the blink periods next to the line colors in the legend; data sets of the same patient seem correlated even with varying blink periods.
Safety
As always, safety was a primary concern throughout this project. From the beginning we identified the lasers as the most likely source of danger. To counter this we chose very low power lasers to minimize damage even in cases of direct eye contact. To further ensure the safety of ourselves and our labmates, we tested in a corner so that no lasers would be shot around the lab. The gui display of the laser controls shows the lasers as green when off and red when on, so as to remind the technician of possible dangers. As a final precaution, the default state of the system is set to have the lasers off and a very precise command must be given to turn them on. This setup ensures that even in a situation in which the Arduino is randomly reset or plagued with random noise as signal, the lasers will remain off and safe.
Telephone wire was used to bundle wires in order to reduce patient entanglement in the wires connecting the Arduino to the Glasses Mounted Automated Perimeter. Any and all exposed wires or connections were wrapped in electrical tape to ensure patient and operator safety.
Interference with other's Designs
Because of the nature of our project, there should not be any interference with other people’s designs. The servos make minimal noise and the only light generated is an extremely directed laser beam. Unless the other projects were using very sensitive audio equipment or were directly in the path of the lasers (between us and the corner), no interference seems possible.
Useability
The Glasses Mounted Automated Perimeter can be used by any patient with limited instruction. The glasses themselves are one-size-fits-all and the person’s height has no bearing on the device’s function. The patient interface is a simple pushbutton and requires little dexterity or strength to use properly.
The technician side of the device is slightly more complex than the patient side, but still requires no extensive training. The technician does not need any medical training nor do they require an in-depth knowledge of the theory or how the system works. Because of the minimal requirements placed on the patient and operator, the Glasses Mounted Automated Perimeter can be used by nearly anyone.
Conclusions top
Meeting of Expectations
In general, we were very pleased with the functionality of our design. We were able to accomplish everything we set out to do in the project proposal. Our device maps out field of view and blind spots with high precision in repeated trials, and we are able to control the perimeter reliably from the GUI. We are also able to collect field of view data at varying blink rates, although we did not notice a significant change for different rates.
Things we would do Differently
While our design functions very well, there are definitely improvements to be made. Currently the glasses are connected to the Arduino through very long wires and a bread board. These wires are unruly and become easily tangled, making the glasses more difficult to take on and off and increasing the risk of damage to the device. We would like to develop a wireless version to avoid these issues and further increase the portability. The perimeter draws approximately .08 mA while operating, so the motors can be powered by battery. The positions of the lasers are calibrated for a patient standing one foot away from the wall, however this distance is difficult to maintain. In order to improve the placement of the stationary spot during scans, we would like to implement distance sensors which alert the patient when they are the appropriate distance from the wall or adjust the angles for the new distance. One of the benefits of the glasses mounted design is that the results are independent of sideways head head tilts, however the results will be affected if the distance from the patient to the wall changes. In order to compensate for these head movements, we would like to add a gyroscope to the glasses so that the position of the beams can be corrected for head movements. We would also like to include eye tracking sensors to evaluate how well the patient is able to focus on the stationary spot during the scan to improve evaluation of the quality of collected data or to reposition the beams. One shortcoming of our design is that it currently only looks for blind spots which occur along the X axis we scan. While this is effective for detecting normal blind spots, vision degeneration can also occur off-axis. In order to improve glaucoma detection, we would like to implement a “Glaucoma Mode,” which quickly performs a 2D raster scan to locate possible problem areas in the visual field. Once regions of interest are determined, the technician would be able to scan along any horizontal or vertical line to map out the shape of the affected area. We chose not to implement glaucoma mode at this time because we were having some difficulty controlling the motors at the extremes of the range. We would like to find new motors before adding this functionality. Lastly, our display method makes the assumption that the field of view and blind spots can be approximated as an ellipse by defining the limits of the major and minor axes. While this is often true for healthy individuals, glaucoma spots can be oddly shaped. Once the 2D scan method is implemented, we will be able to define these regions using more points which are not confined to one vertical and one horizontal axis. This would greatly improve the accuracy of our results.
Use of Other's Design
We used the website of Joe Ballerini's and Matthew Newberg's pachinko machine as a template for this website. Also, as previously mentioned we used David Long's ellipse generating code and credited it accordingly.
Patent or Publishing Opportunities
Although this is only a first prototype, we believe that there are definitely patent opportunities for this project. While many patents already exist for automated perimeters, our design is unique because the field of view is measured by moving lasers mounted in a pair of glasses. By mounting the source of both the stationary and moving spots on the glasses, we have eliminated the need for a cumbersome screen and uncomfortable chin rest. Our design has shown to yield repeatable results, is portable, and can be manufactured for less than $50. While we were unable to compare our results directly to an automated perimeter for clinical use, we are confident that if we cannot already match the accuracy of existing devices we will be able to with a few of the changes mentioned above.
Appendices top
A. Source Code
B. Schematics

Full schematic of our circuitry
C. Division of Labor
| Joseph Ballerini | Both | Gavrielle Untracht |
|---|---|---|
| aglasses.ino | Testing | perimeterGui.m |
| Circuitry | Report | Phsycial Construction |
D. Instructions for Use
Patient:
- Put on glasses
- Technician will indicate where to stand 1 ft away from the wall in a corner
- Try to keep head as stationary as possible
- Focus on stationary spot while observing moving spot with peripheral vision
- Press button when you can no longer see the spot. The technician will inform you whether to look for the edge of visual field or the edge of your blindspot.
Technician:
- Start PerimeterGui.m
- Select scan settings
- Perform a scan for each permutation of settings by clicking “Start Scan”
- Save and load data using buttons in GUI
- Use “Plot Visual Field” button to observe results graphically and compare to previously collected data
References top
This section provides links to external reference documents, code, and websites used throughout the project.
Datasheets
References
Acknowledgements top
We would like to thank Professor Land and all course staff for spending their time dealing with our crossed wires, missing lines of code, and other general problems throughout the course of the class.
We would also like to thank Paul Swirhun and Shao-Yu Liang, the original designers of this website template.
 _
_