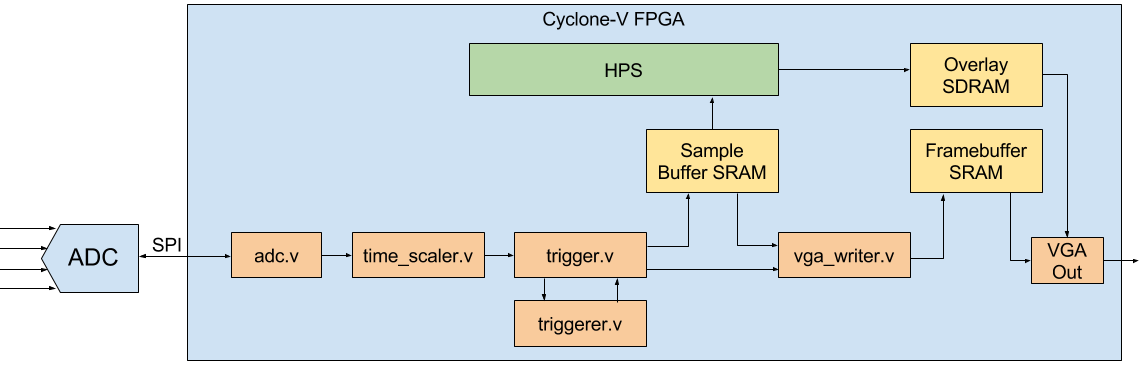
For our design, we chose to push as much of the oscilloscope functionality to the FPGA as possible, with the HPS responsible for configuring the FPGA with the various oscilloscope parameters. All communication from the HPS to the FPGA was done using a simple interface we called the cfg bus. The cfg bus provides a simple write-only method for sending configuration from the HPS to the FPGA. The output of a single HPS-connected 32-bit Peripheral I/O (PIO) module is connected to every configurable module in our design. A number of configuration registers are connected to this bus, each with a register ID. When the upper 8 bits of the cfg bus signals match the register’s ID, the register then stores the lower 24 bits itself. Using this interface, the HPS pushes new settings to the FPGA when the user makes a change to the oscilloscope configuration. Table 1 provides a list of all configuration registers used in the design.
| ID |
Purpose |
Default Value |
| 1 |
Timescale Counter Limit |
0 |
| 3 |
Math Waveform Enable |
0 |
| 4 |
Number of Active Channels (0-Indexed) |
0 |
| 5 |
Triggering Mode |
0 (Rising) |
| 6 |
Triggering Enable |
0 |
| 7 |
Triggering Level |
0x800 (50%) |
| 8 |
Triggering Pulse Width |
0 |
| 9 |
Triggering Source Channel |
0 (CH0) |
| 10 |
CHO Vertical Scale Factor |
4 |
| 11 |
CH0 Vertical Offset |
0 |
| 12 |
CH1 Vertical Scale Factor |
4 |
| 13 |
CH1 Vertical Offset |
0 |
| 14 |
CH2 Vertical Scale Factor |
4 |
| 15 |
CH2 Vertical Offset |
0 |
| 16 |
CH3 Vertical Scale Factor |
4 |
| 17 |
CH3 Vertical Offset |
0 |
| 18 |
Math Vertical Scale Factor |
4 |
| 19 |
Math Vertical Offset |
0 |
| 20 |
Math Mode |
0 (ADD) |
| 21 |
Math Source A |
0 (CH0) |
| 22 |
Math Source B |
1 (CH1) |
| 30 |
CH0 Waveform Color |
0x3b |
| 31 |
CH1 Waveform Color |
0xec |
| 32 |
CH2 Waveform Color |
0x5c |
| 33 |
CH3 Waveform Color |
0xc7 |
| 34 |
Math Waveform Color |
0xe0 |
Table 1: List of configuration registers used in design
ADC Controller
Initially we used the ADC controller provided by the Altera University Program IP. This was connected to the rest of our design over the Avalon-MM bus through the University Program provided External Bus to Avalon Bridge (EBAB). However, this controller had several shortcomings, the most important being that it’s sample rate was not near the ADC max sample rate of 500 KSPS and it was not configurable during runtime which channels were sampled. Because we needed both of these features, we decided to implement our own controller for the ADC.
The onboard ADC is the LTC2308, which communicates over the SPI interface. The sequence of operations for a conversion is to pulse the conversion start line high to start the conversion, then the controller must wait for the conversion to occur. After the conversion time, the controller pulses the SCK line for twelve cycles and shifts in the 12 bits of data on the MISO line. The data on the MOSI line for the first 6 cycles of SCK setup the next ADC conversion. Since the maximum clock frequency of this interface is 40 MHz, but the controller is running on a 50 MHz clock, each SCK cycle consists of two cycles of the controller clock. This results in the controller only achieving a sample rate of 471 KSPS. It would be possible to run the control module on a different clock and refactor the module in order to raise this sample rate to the ADC max of 500 KSPS.
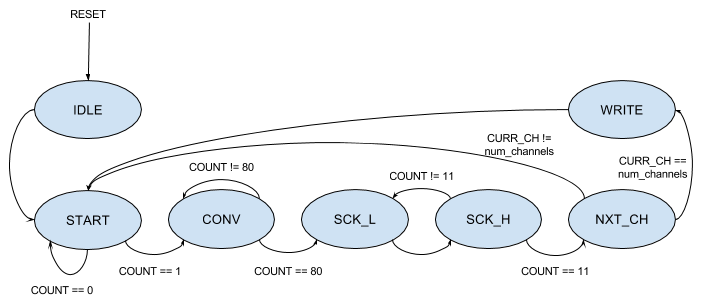
The state machine for the ADC controller begins in the IDLE state at reset where all the outputs and states are reset back to their initial conditions. On the next cycle the FSM moves into the START state which is the only state where the CONVST pin on the ADC is high. The FSM uses a counter to remain in this state for two cycles to keep the CONVST pin high for long enough for the ADC to detect it and begin the conversion sequence. The counter then continues to increment while in the CONV state. The FSM stalls here until the counter reaches 80 to give the ADC enough time to complete the conversion.
Once the counter reaches 80, it is reset back to zero and the controller starts the SPI transaction to read in the data. The FSM alternates between the SCK_L and SCK_H states which set the SCK line to either low or high, respectively. The counter is incremented whenever the FSM reaches the SCK_H state and the FSM exits this back and forth loop once the counter reaches 11, indicating 12 cycles of SCK have occurred.
The input data is latched on the rising edge of the SCK line, so on each transition between SCK_L and SCK_H, the value on the MISO line is left shifted into the MISO value register. In order to setup the ADC, the correct bits must be set on the MOSI line. The value of the MOSI signal is updated on the transition from SCK_H to SCK_L to give an entire cycle of setup time before the ADC reads the value.
Once the SPI transaction is complete, the FSM moves to the NXT_CH state, which handles sampling multiple channels. If the current channel being sampled is not equal to the number of channels active, the current channel is incremented and the FSM moves back to the START state to immediately start the next transaction. If the current channel is equal to the number of channels active, indicating all the channels have been sampled, the current channel is reset back to the first channel and the FSM moves into the WRITE state. In the process of updating the current channel, the MISO data for the next SPI transaction is set. Regardless of whether the FSM proceeds to the START or WRITE state, the 12 bits of data that was just read in from MOSI is set to the current channels data buffer.
The WRITE state is responsible for passing the adc data to the rest of the design. If multiple channels are active, all of the channels are updated at the same time. Since there is a max of four channels, this corresponds to a 48 bit value. Because the sampling rate for the ADC should be constant, we do not want to let the FSM stall due to backpressure from later in the design. To accomplish this, the module simply copies the data from the active channel buffers to an output buffer and sets a valid flag in the one cycle it is in the WRITE state. This valid flag remains high until the rdy input is set, indicating that the value was consumed. This design keeps the ADC at a constant sample rate, but if the value is not consumed before the ADC has completed another conversion it is lost.