Abstract:
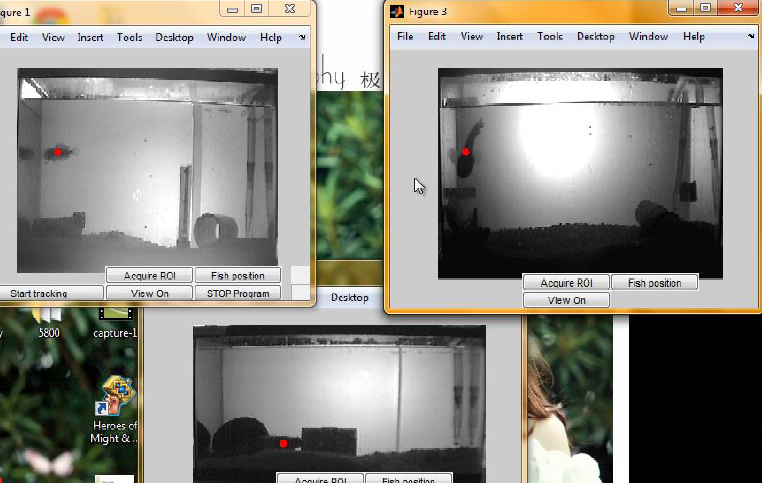
In this project, we constructed a vision-based real time motion capture system to monitor daily
locomotor rhythm of Plainfin Midshipman, a vocal fish. We used infrared cameras to collect
input data and a GUI based Matlab program to display and analyze useful information. We want
to monitor midshipman’s locomotion over 24-hour period of time, but it is almost impossible for
human to manually record for such a long time, a reasonable approach is to design a vision-based
self-recording system which is reliable and user-friendly. Also, infrared camera does not impose
any physical restrictions on fish, which provides a natural way of measuring fish’s daily activity.
In this system, every frame of the picture captured by camera is treated as input of Matlab
Program. With this program, we can find the fish’s location on every frame. Those locations will
be saved in a file, so we can analyze the data to master fish’s activity rhythm.
Full report (pdf)
Code:
zip
FishTrackPlot.m
Fishtrack3.m
d2a.m