Abstract:
The goal of this MEng Design Project for the School of Electrical and Computer Engineering was to integrate
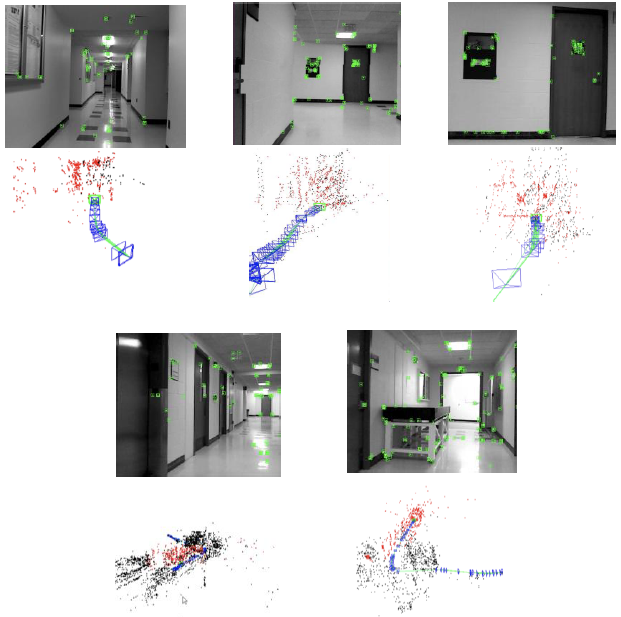
autonomous navigation and simultaneous localization and mapping (SLAM) on a custom-built quadcopter.
The use of SLAM allows the quadcopter to not only build maps in real time, but also localize itself in these maps.
By doing so, the quadcopter can eventually gain the ability to navigate indoor, and eventually outdoor,
spaces – mapping down the environment it has seen thus far. By applying a variety of different aggregation
methods to those mappings, the quadcopter system could eventually be repurposed for a wide variety of uses.
By going one step further and integrating autonomous flight control methods such as optical flow
and basic obstacle avoidance, this project demonstrates the viability of a low-cost mapping solution for
various uses such as search and rescue and security.
Report (pdf)
Poster (pdf)