
 The Skittles Mini-Factory
The Skittles Mini-Factory
Alice Kassar -
ak2282@cornell.edu
Jesse Checkla - jc2862@cornell.edu
Mikhail
Rudinskiy - mr945@cornell.edu
The Skittles Mini-Factory is
your one-stop-shop for Skittle sorting!
![]() Introduction
Introduction
The Skittles
Mini-Factory is self-contained repackaging unit that separates Skittles by
color. Once separated, the Skittles are resealed in individual plastic bags.
The Skittles are dispensed one at a time (either automatically or manually) onto
a light sensing module. Red, green, blue, and white light are reflected off the
skittle and read by the sensor. The resulting intensities are used to
distinguish between the five colors (red, orange, yellow, green and purple).
Once a color is detected, a solenoid shoots the skittle onto a ramp which leads
the skittle to its designated bag. The ramps position is controlled by a servo
and is changed depending on the skittle color. Once the bags are full, the
packaging wheel rotates through a heat sealer to seal and cut the bags.
We chose this project
because we liked the multidisciplinary approach it required. There were
challenging elements from both an electrical and manufacturing engineering
perspective. We needed accurate color sensing, precise servo control, and
repeatable timing to ensure the Skittles would sort correctly. In addition, we
had to build a mechanical structure capable of passing a single Skittle within
fairly strict tolerances. As an added benefit, we acknowledge that many people
(Alice, included) have Skittle flavor preferences which our mini-factory caters
to.

![]() High level design:
High level design:
Sorting Skittles by
color was chosen as a project topic to demonstrate the use of both sensors and
actuation devices on an ATmega1284 microcontroller. This project has a visible
and edible outcome perfect for class demonstrations.
In order to sort and
move Skittles appropriately, our design calls for several different levels of
actuation. These levels roughly correspond to the shelving tiers of our system.
Each step moves the Skittle based on a logic related to the color of the
current Skittle. The actuation components of our Skittles Mini-Factory include
a pull-type solenoid, a position servo motor, and a velocity adjustable servo
motor. Color sensing is performed with an OPT101 sensor and an RGB led. We are
also using a cooling fan, ATmega1284 microcontroller and a multi-voltage power
supply.
A Skittle enters the
system through a funnel connected to the color sensing module. This module
contains an OPT101 (Monolithic Photodiode and Transimpedance Amplifier) which
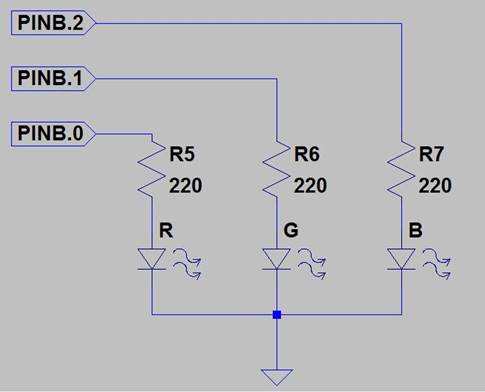
is used along with an RGD led to determine the Skittle’s color. Each lead of
the RGB LED is connected through a 220Ω resistor to a port pin on the
ATmega 1284 microcontroller. In order to turn on any specific color, the system
outputs a high voltage on one of the color the pin. Turning on all three pins
at once produces a bluish/white light.
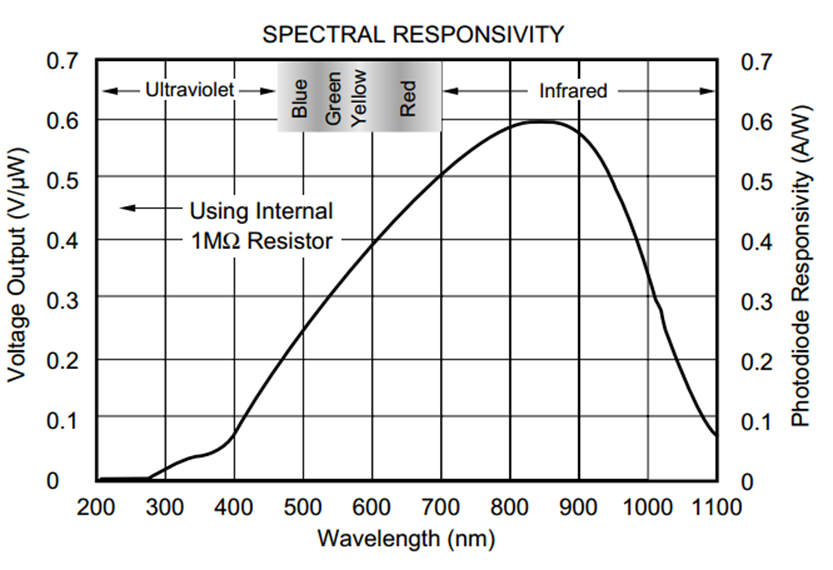
The LED is directed onto
the Skittle with a small light block between it and the photodiode. As light hits
the Skittle, certain wavelengths are reflected. The wavelength of the Skittle’s
color is reflected most strongly. For example, shining a green light onto the
green Skittle will reflect more light than shining a green light onto a red
Skittle.
http://www.ti.com/lit/ds/symlink/opt101.pdf
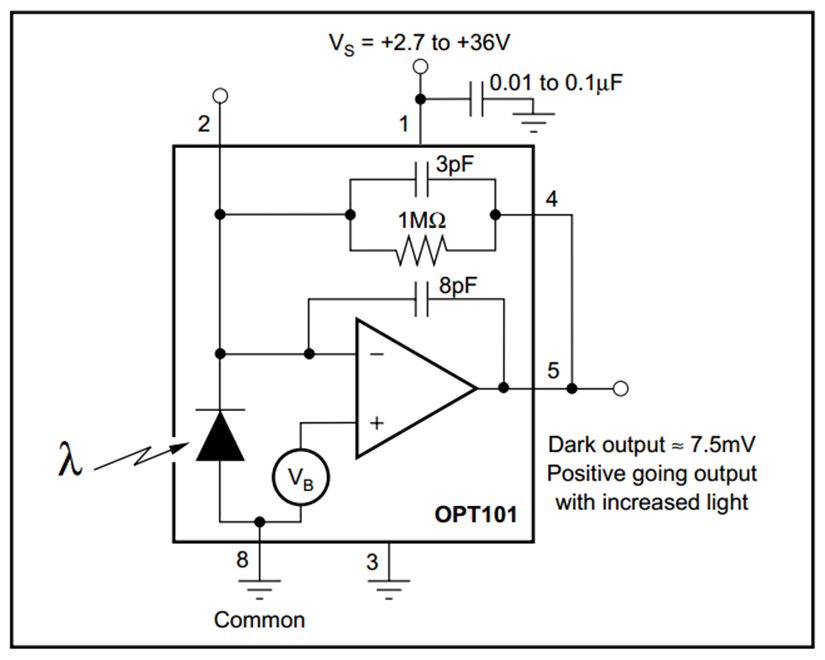
At this point, our
sensor is used to gather the intensity of reflected light. Depending on the
wavelength being transmitted and the reflected intensity measured, we can
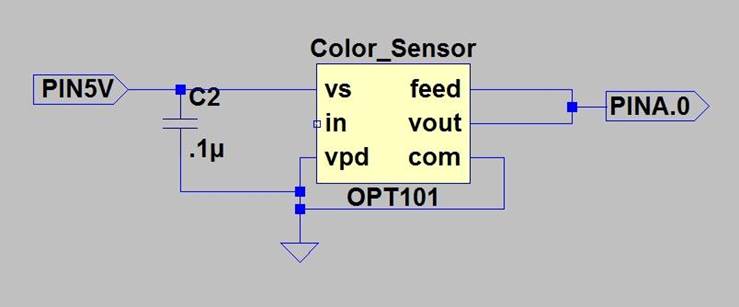
determine the specific color of each Skittle. The following circuit is used to
power the OPT101 sensor and read an output from pin5.
http://www.ti.com/lit/ds/symlink/opt101.pdf
The OPT101 has several
modes of operation, but we found the basic configuration sufficient for our
purposes. The sensor is powered by a 5V power source directly from the
microcontroller.
In order to increase
reliability, the light intensity sensor and RGB LED were soldered onto a small
breadboard and enclosed in a cardboard housing. The purpose of the cardboard
housing is to isolate the sensor from ambient light, isolate the LED from
directly shining onto the sensor and position each Skittle reliably over the
sensor. The structure effectively accomplishes the first two tasks but fails to
position the Skittle in a reliable manner.
|
Color Sensor
Transmitter (RGB LED) |
Color Sensor Receiver (OPT101) |
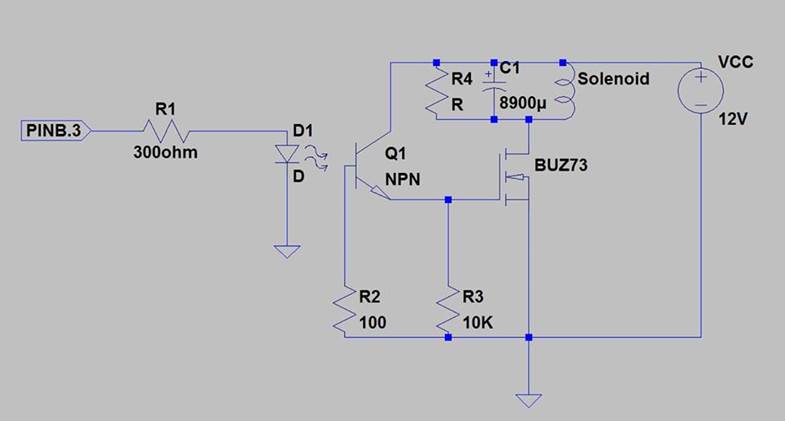
Once a Skittle is sorted,
the system pulls it off the sorting module using a pull-type solenoid. This
solenoid requires. 12V and 1.2Amps of current to operate. For this reason, we
were forced to purchase a larger power supply and build a capacitive discharge
circuit. The circuit is composed of transistor which is connected to the
microcontroller at the gate. A flyback diode is used to prevent inductive
spikes. We initially powered the circuit directly from a voltage source,
however, this has the potential to draw too much current from the supply. In
order to limit supply current draw, we changed our circuit to discharge from a
capacitor and added a current limiting resistor on the supply. An 8900 µF
capacitor powers our servo when the solenoid is grounded. The capacitor is connected
to the 12V supply line and a T=14mS. We are not operating the solenoid faster
than .5Hz, which makes this time constant sufficient to fully charge the
capacitor.
The solenoid itself was
taken from a surplus supply in the lab, making it impossible to get the
manufacturer's specifications. However, we do know that the solenoid is an
intermittent type pull solenoid. Operating the solenoid continuously will cause
it to overheat and cause damage.
|
Solenoid Circuit |
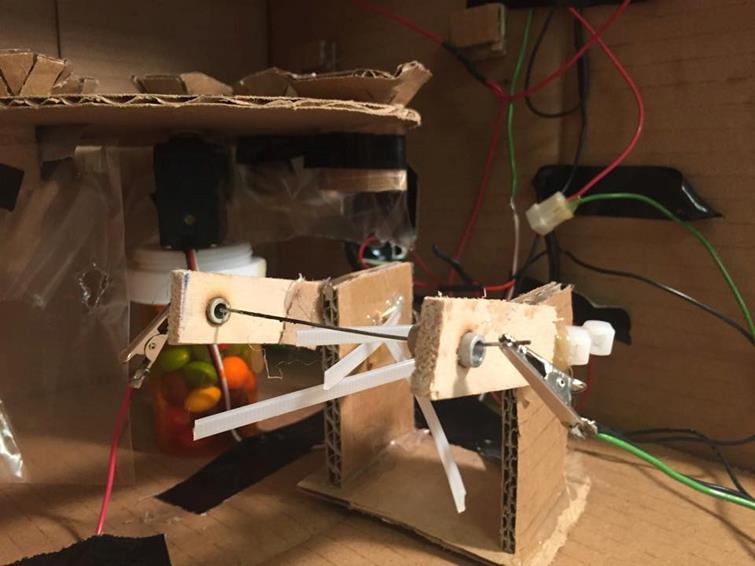
The next state of the
Mini-Factory is the ramp servo component. This servo rotates a ramp to align it
with five clear bags underneath. As the servo is sorted, the ramp is lined up
the correct bag and the the solenoid is triggered. The servo is a position type
servo which attains a position based on the duty cycle of its signal wire. The
servo is operated on a 5V power supply but can accept voltages between 5 and
7.2VDC. This servo is a high torque servo and is able to deliver up to 10Kg/cm
at 360Deg/Sec. The following figure details its PWM command modes:
|
Servo PWM
Positions (not to scale) |
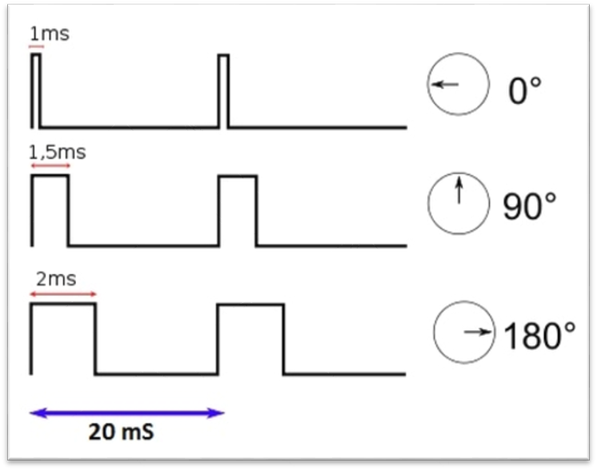
Note that the frequency
of our servo must be at least 20mS to operate properly. We operated this servo
at 32mS. Once the servo is positioned over a bag shoot, the Skittle drops into
a bag of other similarly colored Skittles.
The final component of our
Mini-Factory is a heat sealing device. Once 12 Skittles have been sorted, the
lower wheel turns and pushes each of the five bags through a heat sealing wire.
The wheel is rotated by a velocity-type servo motor. The servo must receive a
PWM with a frequency of at 20mS and a duty cycle around 20%. The speed and
direction of rotation of this servo can be adjusted by changing the duty cycle
of the PWM.
As each bag is turning,
a special pinching device closes each bag before it reaches the heating wire.
This wire is a 20 gauge nichrome wire about 2 inches in length. The measured
resistance of this wire is about .7Ω/in and it is connected to the 3.3V
rail on our power supply. This means that our wire draws about 5 amps of
current. In order to prevent unintended exposure to surrounding materials, the
wire is isolated from flammable components by a metal sleeve sleeves.
In order to ventilate
this system, a 12V fan is attached to the side of our cardboard enclosure. This
fan is not regulated by the microcontroller but rather connected directly to
the power supply.
Powering all the above
devices required a dedicated power supply. We chose a tri-output supply that
delivers 3.3V, 5V and 12V. The current available at 3.3V is 16 amps which is
sufficient to power the heating wire and solenoid (the two components with the
highest power consumption).
In order to increase
reliability, the microcontroller and power amplifier circuits are soldered onto
a protoboard. Likewise, the color sensor and RGD led circuit are contained on a
separate protoboard.
Aesthetics were also
considered in our project and colorful decorations adorn the walls of our
Ming-Factory.
![]() Background Math
Background Math
It is necessary to
calculate the frequency and duty cycle in order to set the PWM of both servos.
The position servo requires a maximal frequency of (16 ms) or 62500 Hz. The
chosen operated frequency on the servo is (32ms) or 31250 Hz. A prescaler of
256 would reduce the clock cycle to 62500 Hz. Then, setting the compare
register to 10 would trigger an interrupt every 160 us. This interrupt routine
will decrement a variable from 200 to 0. This corresponds to a period of 32 ms.
At the beginning of each period the signal is set to high. Then according to
the skittle color, the signal will be set to low after a determined pulse time.
This will generate pulses every 32 ms.
![]() Logical Structure
Logical Structure
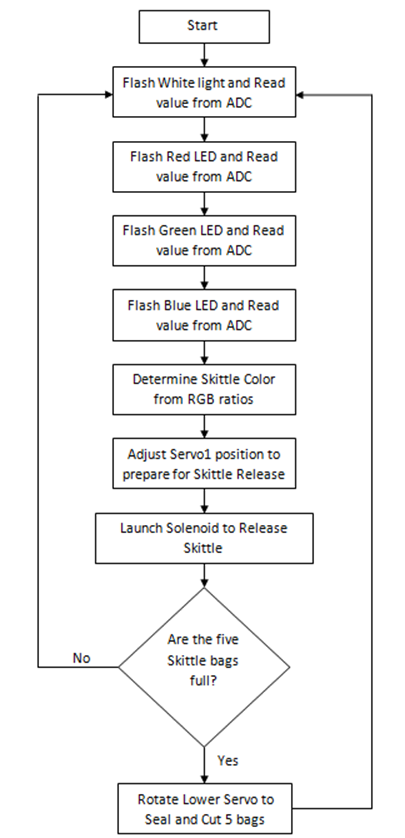
Pictured below is a
block diagram for the code we implemented.
![]() Program/hardware design:
Program/hardware design:
The software consists of four major parts:
1. Color sensing
2. Aligning the servo
3. Launching the solenoid
4.
Continuous servo and heat sealing:
1.
Color sensing:
The color sensor hardware consists of a RGB LED
and an OPT101. The LED is connected to pins B0, B1, B2 and ground. In order to
determine the skittle’s color 4 different light colors are generated: white,
red green and blue. The light will get reflected on the skittle back to the
photodiode. The sensor output is connected to an analog to digital converter on
pin A0. The ADC has an internal reference voltage of 1.1 volts and will output
a number between 0 and 255 depending on the skittle color and the light
generated.
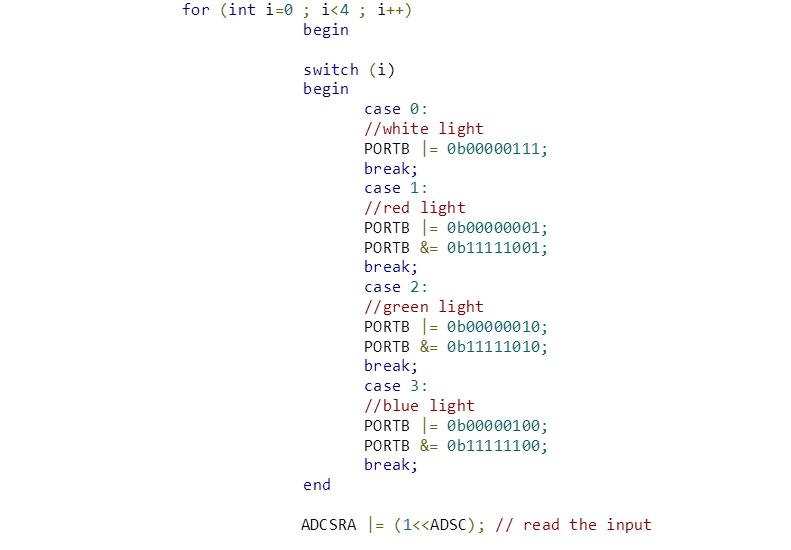
Therefore, in order to determine a skittle
color, the first step would require turning on the 3 led pins (to generate
white light), triggering an ADC conversion and then reading the output on pin
A0. Then, the same procedure will be repeated for the red green and blue light
as shown in the code below:
|
|
|

After reading the ADC outputs, three ratios will
be computed:
·
RG or red to green ratio
·
RB or red to blue ratio
·
GB or green to blue ratio
These ratios will determine the skittle’s color.
They vary within a well determined range; therefore they are bounded from below
and above. The calculated ratios RG, RB and GB should fall respectively within
three set of ranges to determine a color.
However, the orange and red Skittles have
similar color ranges. Therefore, the white light output will differentiate both
colors.
if( (RG>=2 && RG<3.2) && (RB>=4 && RB <=7.8) && (GB>=2 && GB
<=2.71) &&
whitelight<120)
{
fprintf(stdout, "\n\r RED\n\r\n\r") ;
redcolorflag +=1;
colorflag=1;
}
else if( (RG>=2.5 && RG<=3.5) && (RB>=6.1 && RB
<=12) && (GB>=2.4 && GB <=3.7) && whitelight>120)
{
fprintf(stdout, "\n\r ORANGE\n\r\n\r") ;
orangecolorflag+=1;
colorflag=1;
}
else if( (RG>=1.5 && RG<=1.8) && (RB>=3.5 && RB
<=6) && (GB>=2.4 && GB <=3.5))
{
fprintf(stdout, "\n\r YELLOW\n\r\n\r") ;
yellowcolorflag+=1;
colorflag=1;
}
else if( (RG>=0.1 && RG<=1.3) && (RB>=2 && RB
<=2.8) && (GB>=1.75 && GB <=2.5))
{
fprintf(stdout, "\n\r GREEN\n\r\n\r") ;
greencolorflag+=1;
colorflag=1;
}
else if( (RG>=1.5 && RG<=2.4) && (RB>2.8 && RB
<=3.7) && (GB>=1.4 && GB <=2.1))
{
fprintf(stdout, "\n\r PURPLE\n\r\n\r") ;
purplecolorflag+=1;
colorflag=1;
}
Due to variation in the skittle orientation on
the light sensing module, the solenoid will not trigger until three out of five
color reading belong to the same color.

for (int i=0 ;i<5 ; ){
readcolors();
guesscolors();
if(colorflag==1) //if the color is
determined increment the forloop
{
i++;
colorflag=0; // reset the color
flag
fprintf(stdout, "\n\r recognize color \n\r\n\r") ;
}}
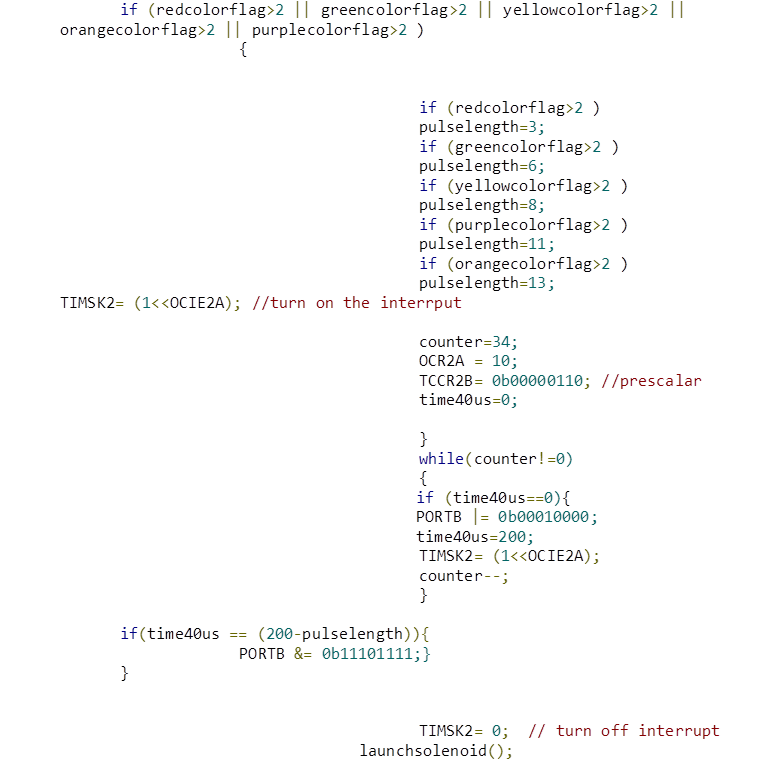
2. Aligning the servo
The next step would be to position the servo
correctly. As soon as a color is determined, timer 2 is turned on and a PWM
signal is generated on PIN B4, long enough to position the servo at its correct
position. The PWM period is around 32 ms and the pulse length vary from 480 us
to 2.24 ms depending on the recognized color. Then timer two will be turned off
to maintain the stability of the servo and the solenoid will be triggered.
|
|
|
3.
Launching the solenoid
Triggering the solenoid requires setting port B3
to 5V for 25 ms as shown below.
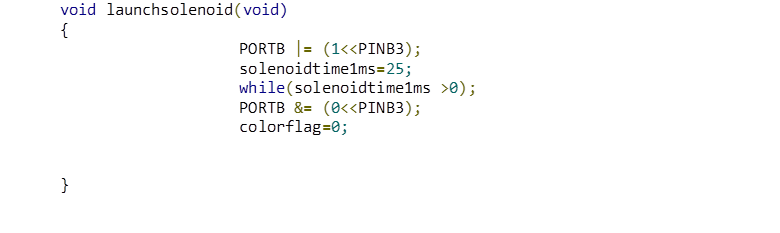
void launchsolenoid(void)
{
PORTB |= (1<<PINB3);
solenoidtime1ms=25;
while(solenoidtime1ms >0);
PORTB &= (0<<PINB3);
colorflag=0;
}
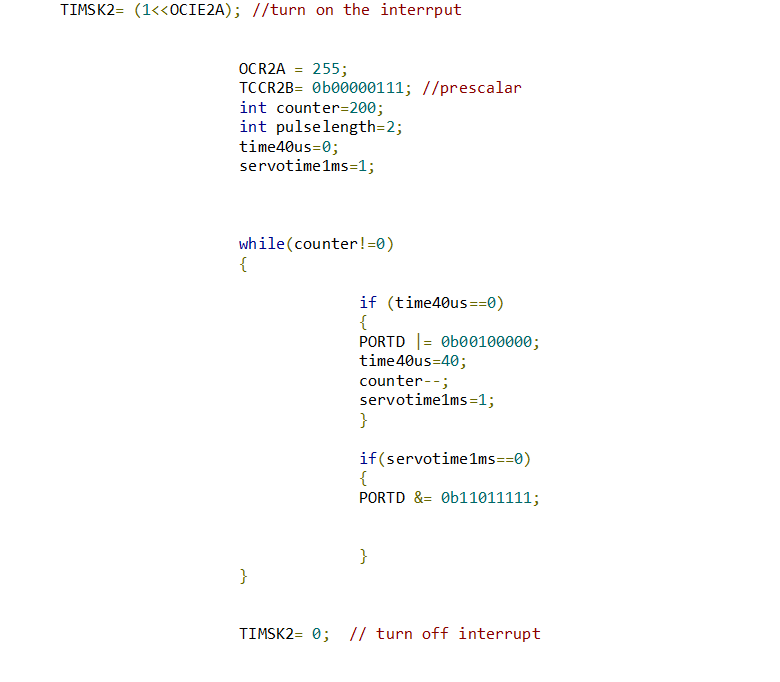
4. Continuous servo and heat sealing:
The project will be completed by sealing the skittle
bags. This requires heating the Nichrome wire by turning on an external switch,
then rotating the continuous servo in the clockwise direction. This PWM signal
will be generated using timer2 on pin D5 as follow:
|
|
|
![]() hardware details:
hardware details:
- The hardware consists of an
optical transceiver, a solenoid, two servo motors and a heat sealer.
- The optical transceiver is divided
into the transmitter, an RGB LED capable of generating 3 different light
colors (red, green, blue), and the receiver, the OPT101.
- The solenoid is driven by a
transistor. It is connected to a 8900 uF capacitor which provides the
necessary current to drive the solenoid. This reduces the amount of
current being pulled directly from the power supply. The capacitor is
charged from a 1.55 ohm power resistor. It is important to opto isolate
the microcontroller output from the solenoid signal to prevent inductive
spikes from reaching the microcontroller.
·
The servo signal line is directly
connected to the output pin of the microcontroller.
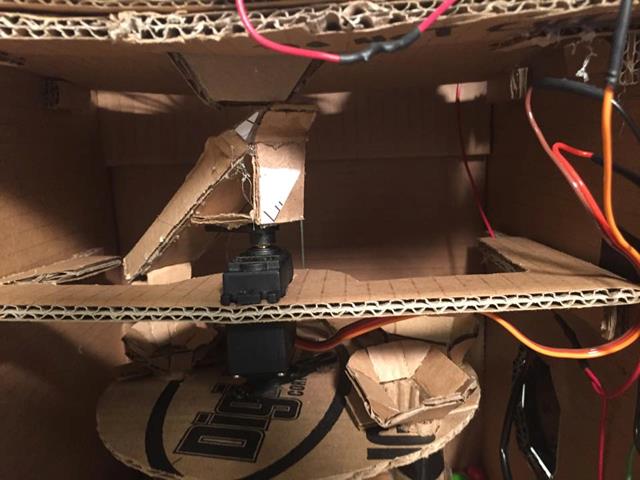
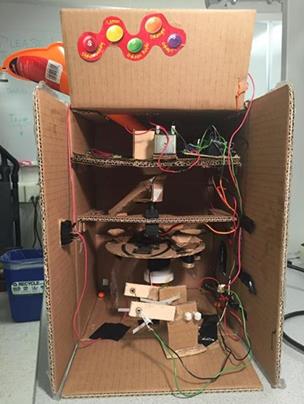
· Building our mini-factory out of cardboard created a number of interesting challenges. We were fortunate to find a box with great structural integrity. We divided the inside into three major sections. The first shelf housed the color-sensing module and the dispensing solenoid. The second shelf held the servo with a mounted ramp. The third section consisted of the packaging wheel mounted on a servo. The wheel has five holes for each individual skittle color bag. Making each shelf removable was particularly helpful when it came time to debug.
· Moving an individual skittle around required fairly precise construction. We preplanned each part before modelling it with cardboard. One of the main advantages of working with cardboard is its strength-to-weight ratio. The servos had no trouble moving their cardboard attachments and yet each shelf was rigid enough to sustain the weight of its components (servos, solenoid, etc.). We also benefited from the ease of repair/modification. If a part failed or needed slight modification it was simple to make the necessary changes. Though similar repairs would likely be less frequent with other materials (wood, 3D-printed ABS, etc.), they would certainly be more costly to implement.
![]() Unsuccessful attempts
Unsuccessful attempts
- We were unable to control the heating
wire from the microcontroller. We used a transistor switch to drive a 5V
relay, but found that switching it on loaded our power supply. The
resulting transient interfered with the servo signal and caused our
packaging wheel to rotate slightly. We ultimately decided to isolate the
heating wire and drive it with a physical switch. We discovered after
implementation that this offered the added benefit of allowing us to
shut-off the heating wire in the event of a dangerous situation.
- We originally intended
to preload the hopper with a large number of Skittles and have dispense
them automatically one-by-one. After multiple redesigns of our dispensing
mechanism, we decided this was not feasible; we could not achieve the
precise machining required with hot-glue and cardboard. We also confirmed
our hypothesis that the Skittles would frequently jam in the
hopper/funnel. Placing the Skittles into the funnel one at a time proved
to be the most effective method. [insert video]
![]() Results of the design:
Results of the design:
![]() Speed of Execution:
Speed of Execution:
· The color sensing module was capable of detecting the color at higher rates than we could reasonably load new Skittles. The limiting factor, then, was the mechanical movement of the servo. During normal operation (no skittle jams, no solenoid misfires) the servo response time to a PWM pulse limits the execution speed. The servo needs approximately 800 to 900 ms to adjust its position. Therefore, on average, one can sort around 0.24 Skittles per second. Assuming an average of 60 Skittles per 2.17oz bag (standard size), the factory would require ~4.2 minutes to complete sorting. In our testing we typically loaded one skittle at a time and waiting until it had reached its bag before loading another. To improve our performance, we could have started reading the next skittle color before the previous skittle had reached its bag. This was difficult to implement because of the hopper complexity.
![]() Accuracy:
Accuracy:
·
The color sensing, after being properly
calibrated, was able to identify the Skittles color with a very high accuracy.
In a test of 25 Skittles, we detected the color with 100% accuracy. However, in
the absence of Skittles, the system would sometimes recognize a purple color
given the color similarity between purple and the black cover of the sensor.
Unfortunately, Skittles would occasionally become stuck on their way down, and
fall into the wrong bag, reducing our accuracy substantially.
·
As for the servo, the main problem
was being able to stop it at exact angles. The servo’s positions were not
exactly where we wanted them to be, but they were within a tolerable range. To
compensate for that, we created little catch bins with wide-mouthed openings.
![]() Safety
Safety
·
Our mini-factory power supply was
run from line-voltage and was therefore a source of potential danger. We were
careful to fully insulate high-voltage lines and the power supply itself had
protection on its high voltage transformers to protect against accidental
electrical shocks. We also used heatshrink or electrical tape to insulate
exposed wireless through the factory.
·
Our second largest source of danger
was the heating NiChrome wire. The wire reached temperatures in excess of 400 ℉. To enforce a standard of safety we always discussed what
we were testing before turning the wire on and we always had one group member
prepared to shut off the power. As discussed in the ethics section, we also
made sure to warn anyone involved in our demonstrations. As a result of these
precautions, we had no injuries in the making, testing, and demonstration of
our project.
![]() Usability
Usability
·
Our design is easy to
operate but could also be hazardous if you are unaware of the dangers. However,
the Skittles mini-factory is not a consumer product. It is a small scale
factory model and wouldn’t normally be operated by a single person.
![]() Conclusion:
Conclusion:
A Skittle color sorter was created
which is able to sort and package Skittle candy by color. The system was
programmed on an ATmega1284 microcontroller with an interface to numerous
peripherals. These peripherals were a color sensor, solenoid, two types of
servos a heat sealer and a fan. The purpose of these devices was to move a
single Skittle along and package it into heat sealable bags.
The device was able to sort .24 Skittles per second.
It was able to perform with near 100% accuracy if it was calibrated
shortly before testing. Environmental conditions greatly affected the operation
of the OPT101 sensor. This sensor is sensitive to very small changes in light
and temperature. Every time we changed the configuration, the amount of ambient
light reaching the sensor fluctuated and therefore skewed our results.
Several mechanical issues arose with
the transport of Skittles throughout the device. It should be noted that
Skittles are not perfectly round and vary slightly in size. Therefore, they
cannot be considered perfect spheres and caused transport issues. The first
such problem was Skittles jamming in the funnel. This problem could have likely
been solved with an auger in the infeed hopper. However, time and material
constraints prevented us from implementing this solution.
Another such issue was the distance that
Skittles had to fall between the ramp and the bags. Small discrepancies in
roundness of the servo catcher wheel prevented the design from being perfectly
symmetrical. This meant that some colors of Skittles had to fall farther than
others to reach their destination. Although these factors only marginally
affected the performance of the Skittle factory, they much be considered in
future iterations. Ideally, the whole factory would be constructed of a rigid
and accurate material such as plastic.
The sorting holder and solenoid
attachment also proved troublesome in this design. This component held the
Skittle in position while the color sensor read its color and later pulled it
off the sensor with the solenoid. However, alignment of every Skittle over the
sensor identically was difficult to accomplish with this cardboard design.
Making a 3d printed holder would benefit this design.
A more robust PCB board would also
help the robustness of this design. We encountered several problems because of
short circuits in our design. These were caused by jumped traces or broken
ground connections on our solder board.
Overall, this Skittle factory
performed its sorting and packaging task to a reasonable standard. Most issues
arose from mechanical rather than software issues. The project was interesting
and educational for all involved.
![]() Regulatory Standards
Regulatory Standards
This
design came in contact with food items and cleanliness was a consideration.
Although our material choices were not rated specifically for contact with food,
we did consider food safe materials as outlined by the Food and Drug
Administration. Also, the machinery itself posed few hazards as we insulated
and isolated as many dangerous components as possible.
![]() Intellectual property considerations.
Intellectual property considerations.
Initial research
revealed no intellectual property concerns. Similar candy sorters have been
made but were not patented. We found a few relevant patents (listed below) but
they are all over 20 years old and, therefore, expired. Moreover, most of these
patents detail specific methods and not the theory behind them. For example,
there is no patent on the use of RGB light sources to detect color or on the
use of hot wires to melt heat-sealable bags.
·
Color Sensor (Patent US 4678338 A, 1987)
·
Color sensor system for the recognition of
objects with colored surfaces (Patent US 4917500 A, 1990)
·
Heat sealing apparatus using a wire sealing
element (Patent US 3912575 A,
1975)
![]() Ethical considerations:
Ethical considerations:
Adherence to the IEEE Code
of Ethics was stressed throughout each phase of the project. We mitigated potential risk as much as possible by
covering exposed wires with heatshrink or electrical tape and we positioned our
heating element to avoid unintended interaction with the surroundings. A
ventilation fan was included to limit human exposure to fumes from the heat
sealing process. We also disclose safety hazards to anyone involved in the
construction, testing, or demonstration of our project.
While
our attempt at receiving sponsorship from the Wrigley Corporation was not well
received, this partnership would not have posed a conflict of interest. We had
chosen to sort Skittles prior to contacting Wrigley and were not under any
obligation to sort competing products.
Both
internal and external criticisms were sought and utilized to improve our
project. We received helpful advice from Dr. Bruce Land, Ahmed Kamel, and
Eileen Liu and were careful to credit specific contributions to their owners.
In general, our team worked to assist each other in developing new technical
skills while maintaining awareness of our limitations. For example, we
recognized the danger in testing our heating wire (high current and high
temperature) and we were quick to consult Dr. Land to ensure our proposed test
methods were both safe and effective.
Finally,
we based all claims and estimates about our mini-factory performance off
available data. Overstating the performance of your project could have serious
legal implications and may even endanger the public.
![]() Final Thoughts
Final Thoughts
A Skittle sorting
mini-factory was created to sort Skittles by color, move them to separate bags
and seal each individual bag. A color sensing module used ratios of Red, Green,
and Blue reflectance to determine the Skittle color. Each color was assigned to
a specific servo position, allowing the Skittles to fall down a ramp and into
their separate bags. Once a certain number of Skittles was sorted, the system
moved each bag through a heat sealing wire which simultaneously cut and sealed
each bag. The result was small sealed bags containing only one color of
Skittles.
We accomplished all
primary objectives from our original proposal and are very pleased with the
results. The mini-factory works to specification but several aspects could have
been improved. Perhaps our biggest problem was dispensing individual Skittles
from the hopper. This turned out to be a non-trivial task and we ultimately
were forced to drop in one Skittle at a time. As a result, our rate of Skittle
sorting was below our desired outcome. Future improvements could include a
hopper with some mechanical action (auger, etc.) to mitigate this problem.
We were very pleased with the accuracy of the color
sensor. Once calibrated we had a near 100% success rate. Our heat sealer also
worked as expected, but improving the physical mechanism for aligning the bags
prior to sealing may have prevented the occasional burned Skittle. The Skittles
mini-factory was a successful design project and also offers a lot of room for
future advancements.
![]() Code Listing
Code Listing
#define F_CPU 16000000UL
#include <avr/io.h>
#include <avr/pgmspace.h>
#include <avr/interrupt.h>
#include <stdlib.h>
#include <math.h>
#include <util/delay.h>
#include <avr/sleep.h>
#define SEM_RX_ISR_SIGNAL 1
#define SEM_STRING_DONE 2 // user hit
<enter>
#include "trtSettings.h"
#include "trtkernel_1284.c"
#include <util/delay.h>
#include <stdio.h>
#include <inttypes.h>
#include <stdio.h>
#include <avr/pgmspace.h>
#include <stdio.h>
#include <string.h>
#include <util/delay.h> // needed for
lcd_lib
#include <inttypes.h>
#include "trtUart.h"
#include "trtUart.c"
// putchar and getchar are in uart.c
FILE uart_str = FDEV_SETUP_STREAM(uart_putchar,
uart_getchar, _FDEV_SETUP_RW);
#define begin {
#define end }
#define SEM_SHARED 7
#define SEM_COLOR 8
volatile int time1ms;
volatile int solenoidtime1ms;
volatile int servotime1ms;
int8_t uart_buffer[17];
volatile int time40us=300;
volatile double pulselength=6;
int Ain;
int args[4] ;
double whitelight;
double redlight;
double greenlight;
double bluelight;
double color[4];
double RG,RB,GB;
double whitecalibrated=0 ;
double redcalibrated=0 ;
double greencalibrated=0 ;
double bluecalibrated=0;
int redcolorflag=0;
int greencolorflag=0;
int purplecolorflag=0;
int yellowcolorflag=0;
int orangecolorflag=0;
volatile int colorflag=0;
int stop=0;
int skittlecounter=0;
volatile int signalservo=1;
ISR (TIMER0_COMPA_vect)
begin
//Decrement the time if not already zero
if (time1ms>0) --time1ms;
if (solenoidtime1ms >0) --solenoidtime1ms;
if (servotime1ms >0) --servotime1ms;
end
ISR (TIMER2_COMPA_vect)
begin
if (time40us >0) --time40us;
end
void colortask ( void* agrs)
begin
colorflag=0; // clear the color flag
uint32_t rel, dead ;
int counter=34;
// time100us=200;
while(1)
begin
for (int i=0 ;i<5 ; )
{
readcolors();
guesscolors();
if(colorflag==1) //if the color is determined increment
the forloop
{
i++;
colorflag=0; // reset the color flag
fprintf(stdout, "\n\r recognise color \n\r\n\r") ;
}
}
if (redcolorflag>2 || greencolorflag>2 ||
yellowcolorflag>2 || orangecolorflag>2 || purplecolorflag>2 )
{
if (redcolorflag>2 )
pulselength=3;
if (greencolorflag>2 )
pulselength=6;
if (yellowcolorflag>2 )
pulselength=8;
if (purplecolorflag>2 )
pulselength=11;
if (orangecolorflag>2 )
pulselength=13;
fprintf(stdout, "\n\r turn on timer2 \n\r\n\r") ;
TIMSK2= (1<<OCIE2A); //turn on the
interrput
counter=34;
OCR2A = 10;
TCCR2B= 0b00000110; //prescalar
time40us=0;
}
while(counter!=0)
{
if (time40us==0)
{
//fprintf(stdout,
"\n\r turn on timer2
\n\r\n\r") ;
PORTB |= 0b00010000;
time40us=200;
TIMSK2= (1<<OCIE2A);
counter--;
}
if(time40us == (200-pulselength))
{
PORTB &= 0b11101111;
}
}
TIMSK2= 0; // turn off interrupt
launchsolenoid();
skittlecounter+=1;
if(!(skittlecounter%3))
{
PORTD |= 0b00001000;
servotime1ms=5000;
while(servotime1ms);
fprintf(stdout, "\n\r turn on relay \n\r\n\r")
;
DDRD=(1<<PIND5);
rotateservo();
}
/* if(!(skittlecounter%4))
{
DDRD=(1<<PIND5);
servotime1ms=2000;
while(servotime1ms);
rotateservo();
skittlecounter=0;
} */
// reset colorlfags
redcolorflag=0;
yellowcolorflag=0;
greencolorflag=0;
orangecolorflag=0;
purplecolorflag=0;
rel = trtCurrentTime() + SECONDS2TICKS(0.1);
dead = trtCurrentTime() + SECONDS2TICKS(0.01); //how
long do we need for that
trtSleepUntil(rel, dead);
end
end
void setcolors()
{
whitelight= color[0];
redlight= color[1];
greenlight= color[2];
bluelight= color[3];
}
void readcolors()
begin
fprintf(stdout, "\n\r reading colors\n\r\n\r")
;
for (int i=0 ; i<4 ; i++)
begin
switch (i)
begin
case 0:
//white light
PORTB |= 0b00000111;
break;
case 1:
//red light
PORTB |= 0b00000001;
PORTB &= 0b11111001;
break;
case 2:
//green light
PORTB |= 0b00000010;
PORTB &= 0b11111010;
break;
case 3:
//blue light
PORTB |= 0b00000100;
PORTB &= 0b11111100;
break;
end
ADCSRA |= (1<<ADSC); // read the input
time1ms=100; //set a 500 ms time
while(time1ms!=0);
Ain = ADCH;
color[i]=ADCH;
fprintf(stdout, "\n>") ;
sprintf(uart_buffer,"%i",Ain);
fprintf(stdout, uart_buffer) ;
end
setcolors();
end
void guesscolors()
begin
begin
RG=redlight/greenlight;
fprintf(stdout, "\n>") ;
sprintf(uart_buffer,"%i",(int)(RG*100));
fprintf(stdout, uart_buffer) ;
RB=redlight/bluelight;
fprintf(stdout, "\n>") ;
sprintf(uart_buffer,"%i",(int)(RB*100));
fprintf(stdout, uart_buffer) ;
GB=greenlight/bluelight;
fprintf(stdout, "\n>") ;
sprintf(uart_buffer,"%i",(int)(GB*100));
fprintf(stdout, uart_buffer) ;
if(
(RG>=2 && RG<3.2) && (RB>=4 && RB
<=7.8) && (GB>=2
&& GB <=2.71) && whitelight<120)
{
fprintf(stdout, "\n\r RED\n\r\n\r") ;
redcolorflag +=1;
colorflag=1;
}
else if(
(RG>=2.5 && RG<=3.5) && (RB>=6.1 && RB
<=12) && (GB>=2.4
&& GB <=3.7) && whitelight>120)
{
fprintf(stdout, "\n\r ORANGE\n\r\n\r") ;
orangecolorflag+=1;
colorflag=1;
}
else if(
(RG>=1.5 && RG<=1.8) && (RB>=3.5 && RB
<=6) && (GB>=2.4
&& GB <=3.5))
{
fprintf(stdout, "\n\r YELLOW\n\r\n\r") ;
yellowcolorflag+=1;
colorflag=1;
}
else if(
(RG>=0.1 && RG<=1.3) && (RB>=2 && RB
<=2.8) && (GB>=1.75
&& GB <=2.5))
{
fprintf(stdout, "\n\r GREEN\n\r\n\r") ;
greencolorflag+=1;
colorflag=1;
}
else if(
(RG>=1.5 && RG<=2.4) && (RB>2.8 && RB
<=3.7) && (GB>=1.4
&& GB <=2.1))
{
fprintf(stdout, "\n\r PURPLE\n\r\n\r") ;
purplecolorflag+=1;
colorflag=1;
}
end // end of the second for loop
end
void launchsolenoid(void)
{
PORTB |= (1<<PINB3);
solenoidtime1ms=25;
while(solenoidtime1ms >0);
PORTB &= (0<<PINB3);
colorflag=0;
}
void rotateservo(void)
{
TIMSK2= (1<<OCIE2A); //turn on the
interrput
OCR2A = 50;
TCCR2B= 0b00000110; //prescalar
int counter=45;
int pulselength=2;
time40us=0;
while(counter!=0)
{
if (time40us==0)
{
fprintf(stdout, "\n\r turn on timer2 \n\r\n\r") ;
PORTD |= 0b00100000;
time40us=10;
counter--;
}
if(time40us == (10-pulselength))
{
PORTD &= 0b11011111;
}
}
TIMSK2= 0; // turn off interrupt
}
int main(void)
{
sei();
time1ms=500;
DDRB = (1<<PINB2) | (1<<PINB1) |
(1<<PINB0) | (1<<PINB3) |(1<<PINB4)
; //set DDRB pins 0,1,2,3 as outputs
DDRD= (1<<PIND3) |(1<<PIND5);
PORTB=0;
PORTD &= 0b11110111;
//turn on timer 0
//set up timer 0 for 1 mSec timebase
TIMSK0= (1<<OCIE0A); //turn on timer 0 cmp match ISR
OCR0A = 249;
//set the
compare re to 250 time ticks
//set prescalar to divide by 64
TCCR0B= 3; //0b00001011;
// turn on clear-on-match
TCCR0A= (1<<WGM01) ;
//turn on timer
//set up timer 0 for 1 mSec timebase
// TIMSK2= (1<<OCIE2A); //turn on timer 2 cmp match ISR
OCR2A = 10;
//set the
compare re to 250 time ticks
//set prescalar to divide by 256
TCCR2B= 0b00000110; //0b00001011;
// turn on clear-on-match
TCCR2A= (1<<WGM21) ;
//ADC
ADMUX = (0<< REFS0)|(1<<REFS1)|(1<<ADLAR)
;
//RFSO=0, RFSO=1 for internal 1,1 volts
//channel 0
//enable ADC and set prescaler to
1/128*16MHz=125,000
//and clear interupt enable
//and start a conversion
ADCSRA = (1<<ADEN) | (1<<ADSC) + 7 ;
//ADN=1 to enable the ADC
//ADIF=0 disable the interrupt
//init the UART -- trt_uart_init()
is in trtUart.c
trt_uart_init();
stdout = stdin = stderr = &uart_str;
fprintf(stdout,"\n\r TRT november\n\r\n\r");
fprintf(stdout, ">") ;
// start TRT
trtInitKernel(80); // 80 bytes for the idle task stack
//trtCreateTask(colortask,
400, SECONDS2TICKS(0.05), SECONDS2TICKS(0.06), &(args[0]));
set_sleep_mode(SLEEP_MODE_IDLE);
sleep_enable();
while(1)
begin
sleep_cpu();
end
} // end of main
![]() Cost details
Cost details
|
Item |
Vendor |
Unit Cost |
Quantity |
Total Cost |
|
ATMega1284 |
Cornell Lab |
5.00 |
1 |
5.00 |
|
Microcontroller PCB |
Cornell Lab |
4.00 |
1 |
4.00 |
|
1N4001 Diode |
Cornell Lab |
0.00 |
2 |
0.00 |
|
OPT101 |
Cornell Lab |
8.00 |
1 |
8.00 |
|
Small Solder Board |
Cornell Lab |
1.00 |
1 |
1.00 |
|
Large Solder Board |
Cornell Lab |
2.50 |
1 |
2.50 |
|
Transistor |
Cornell Lab |
0.00 |
2 |
0.00 |
|
RGB LED |
Cornell Lab |
2.00 |
1 |
2.00 |
|
Position Servo |
Mpja.com |
7.95 |
1 |
7.95 |
|
Continuous Servo |
Cornell Lab |
0.00 |
1 |
0.00 |
|
12 volts power supply |
Cornell Lab |
5.00 |
1 |
5.00 |
|
Power supply |
Mpja.com |
3.95 |
1 |
3.95 |
|
Fan |
Mpja.com |
0.99 |
1 |
0.99 |
|
Linear Solenoid |
Cornell Lab |
5.00 |
1 |
5.00 |
|
Skittles |
Walmart |
12.74 |
1 |
12.74 |
|
Opto isolator |
Cornell lab |
0.00 |
1 |
0.00 |
|
Heat sealable bags |
Michael’s |
3.00 |
1 |
3.00 |
|
Nicrom Wire |
Ebay |
1.49 |
1 |
1.49 |
|
Switch |
0.00 |
1 |
0.00 |
|
|
Funnel |
Walmart |
3.00 |
1 |
3.00 |
|
Total: |
65.62 |
![]() Team Member Tasks
Team Member Tasks
![]() Jesse Checkla: Lead
Cardboard Engineer, Color Sensor Calibration, Solenoid Circuitry/ Programming, Heat
Sealer testing, Hot Glue Technician
Jesse Checkla: Lead
Cardboard Engineer, Color Sensor Calibration, Solenoid Circuitry/ Programming, Heat
Sealer testing, Hot Glue Technician
![]() Alice Kassar: Servo
Control Programming, Solenoid Control Programming, Color Sensor Calibration
Alice Kassar: Servo
Control Programming, Solenoid Control Programming, Color Sensor Calibration
![]() Mikhail Rudinskiy: Power
Supply Integration, Solenoid Circuit Design, Solenoid Programming, Heat Seal
Control, Servo Control
Mikhail Rudinskiy: Power
Supply Integration, Solenoid Circuit Design, Solenoid Programming, Heat Seal
Control, Servo Control
![]() Data sheets
Data sheets
![]() Mega 1284P datasheet: http://www.atmel.com/images/doc8059.pdf
Mega 1284P datasheet: http://www.atmel.com/images/doc8059.pdf
![]() OPT101 datasheet : http://www.ti.com/lit/ds/symlink/opt101.pdf
OPT101 datasheet : http://www.ti.com/lit/ds/symlink/opt101.pdf
![]() Power supply datasheet: http://datasheet.octopart.com/VLT130-4101-EOS-Power-datasheet-11629924.pdf
Power supply datasheet: http://datasheet.octopart.com/VLT130-4101-EOS-Power-datasheet-11629924.pdf
![]() Mosfet datasheet: http://www.alphacron.de/download/hardware/BUZ73.pdf
Mosfet datasheet: http://www.alphacron.de/download/hardware/BUZ73.pdf
![]() Vendor sites
Vendor sites
![]() References/Borrowed Code
References/Borrowed Code
![]() Portions of code were
borrowed from the Tiny Real Time examples provided by Dr. Bruce Land. http://people.ece.cornell.edu/land/courses/ece4760/TinyRealTime/index.html
Portions of code were
borrowed from the Tiny Real Time examples provided by Dr. Bruce Land. http://people.ece.cornell.edu/land/courses/ece4760/TinyRealTime/index.html