Hardware Design
Vehicle Chasis
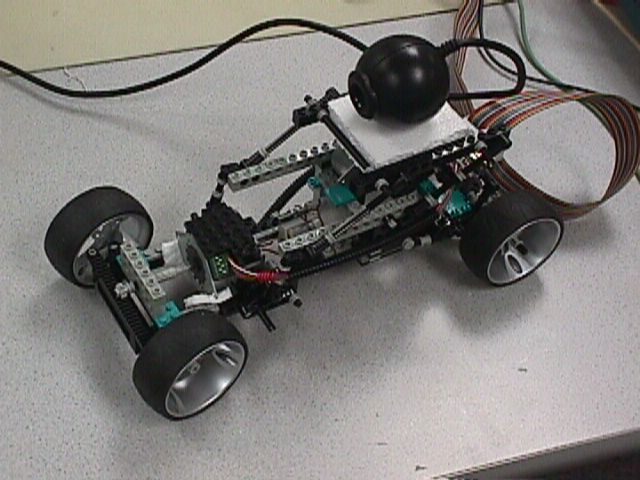
We begin the hardware design part of this project by trying to figure out the best way to efficiently mount the motors. Multiple mechanical models were created and torn apart until an acceptable model was found. At the end, we decided to create the mechanical model using components from Lego Technic™ 'Turbo Command' package. It basically consists of 472 Lego pieces which include the components to build a differential wheel system. Epoxy is used to fix the Lego gear pieces to the drive shafts of two motors. Wires and polystrene is used to provide support and strengthen the mechanical model. Click here to see final mechanical model for the vehicle.
Transistor Switches
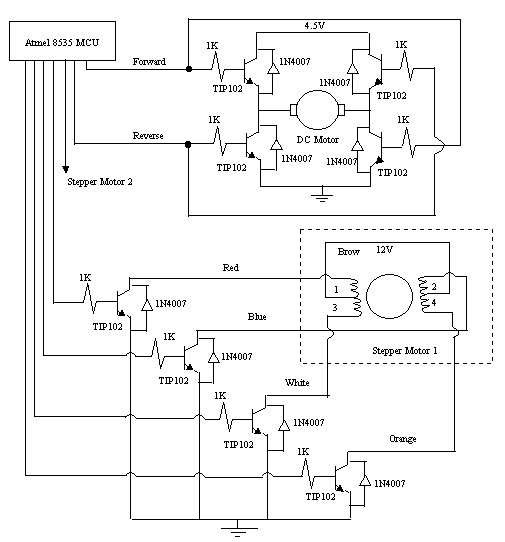
Transistor switches are used to provide the proper stepping sequence for the stepper motor. Since the output from the Atmel board is only 5V, transistor switches are used to provide 12V signal which is needed by the stepper motor to operate. Also, A H-bridge transistor switch network is used to enable forward and reverse movement of the DC motor. The circuit diagram for these switches can be found here. The transistor switches also provide electrical protection for the ATMEL microcontroller unit from the voltage spikes produced by the motors. The transistor used is TIP102 (npn).
Stepper Motor
The stepper motor we use has four coils which, when energized in the correct sequence, cause the permanent magnet attached to the shaft to rotate. Reversing the order of the steps in a sequence will reverse the direction of rotation. In our project we used the stepper motor to provide steering and also to move the camera mount rack. Since the mechanical design requires the stepper motor to have a big torque, we used the 'two-coil excitation' stepping sequence. In this stepping sequence, each successive pair of adjacent coils is energized in turn. Click here to see an animated picture of the stepping sequence. This stepping sequence however doesn't provide smooth movements and uses more power compared to the normal stepping sequence but produces greater torque.
DC Motor
We use a 3V DC motor to provide forward and reverse movement for the MLV. We found that this DC motor consumes a lot of power, thus very inefficient.
Planetary Gear System
A planetary gear train is a mechanism consisting of an assembly of meshed gears: the sun gear, the planet carrier, and the ring gear. A planetary gearset is used to reduce the 'weight' of the vehicle seen by the DC motor and increase its efficiency. Click here to see the internal mechanism of a planetary gear system.
Differential Wheel System
Differential wheel system is widely used in modern vehicle due to its safety features. We used the differential wheel system simply because it is included in the Lego package and it looks really cool! Click here to see a picture of the differential wheel system.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}