t h e G U I |
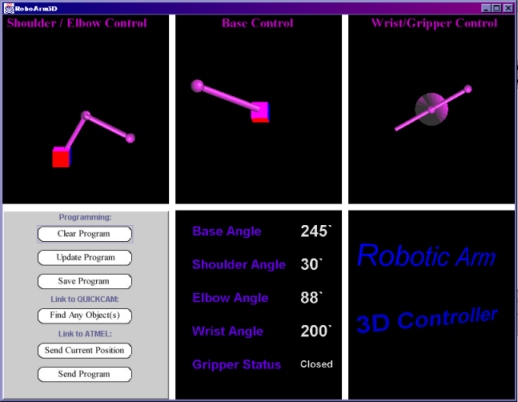
The GUI for the robotic arm control was written in Java3D because as a Java applet it can be incorporated into a web page for use with web browsers, and the structure of Java3D makes it easy to work with objects in 3 dimensions. The program consists of three different views of the arm, representing the three basic sectors that can be manipulated. The upper left screen controls the shoulder and elbow joints of the arm, where either joint can be grabbed and rotated between its extreme angles, and you can see the angles update live before you. The upper middle screen deals with the base joint, where you can spin the base as desired. The upper right screen deals with the wrist and the gripper. Left button spins the wrist, and right button click toggles the gripper. The lower right control panel deals with creating new programs (sets of positions), updating them (add a new position to the set), saving them as .ARM files, quickcam link to object recognition code (not fully implemented), and the sending of positions or .ARM files to the Atmel microcontroller.
Note: to run this software Java3D and JavaComm packages must be on the system by which you run it.