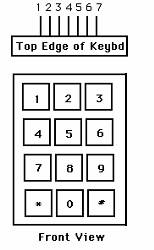
Pin 1 -- col 1 4 7 *
Pin 2 -- col 2 5 8 0
Pin 3 -- col 3 6 9 #
Pin 4 -- row 1 2 3
Pin 5 -- row 4 5 6
Pin 6 -- row 7 8 9
Pin 7 -- row * 0 #
|
|
Pin 1 -- col 1 4 7 * Pin 2 -- col 2 5 8 0 Pin 3 -- col 3 6 9 # Pin 4 -- row 1 2 3 Pin 5 -- row 4 5 6 Pin 6 -- row 7 8 9 Pin 7 -- row * 0 # |