Application Software
Overview
We used the GameX graphics
engine to run the main task scheduling loop as well as play-back recorded data
in both real time and pre-recorded data sets (.mot files). Microsoft Visual Studio was used to develop
this application in C++.
GameX
GameX is a free,
open-source game/graphics engine developed by Rama Hoetzlein, a graduate of
Cornell University’s Computer Science Department. GameX was designed to provide a single object interface for all
game functions, thus eliminating the need to develop sophisticated code using
different low-level APIs for sound and graphics. In addition to ease-of-use,
GameX is thoroughly documented and comes with extensive demos to support new
game developers. [g1]
To import the GameX engine
into a Visual Studio project, a few things must be done:
1. The GameX Library, gamex.lib, must be added
to the buildable libraries file (check me on this) for the project so it can be build with the
project.
2. The Main c++ file must first contain the
definition:
#define
GAMEX_MAIN
3. The Main c++ file must contain the gamex header
file:
#include
"gamex.hpp"
4. The Main c++ file must contain three functions: GameInit, GameRun and GameDraw.
A blank main c++ file for GameX is shown below:
// GameX Main C++ File #define GAMEX_MAIN #include "gamex.hpp" void GameInit (void) GameX.Initialize ("Motion
Capture", RUN_NOCONFIRMQUIT | VIDEO_32BIT | VIDEO_WINDOWED
| RUN_BACKGROUND, 800, 60 .
. . void GameRun (void) { . . . void GameDraw (void) GameX.ClearScreen(); GameX.Begin3Dscene(); . . . . . . }
{
}
}
GameX.End3DScene ();
When compiled and built
into an executeable, the program will call GameInit and then
consecutively call GameRun followed by GameDraw at a rate of 60
to 70 times a second.
We used the 3D drawing
tools in GameX to provide motion capture playback. Some useful GameX objects are:
Vector3DF – A 3D vector containing x,y and z components as
32-bit floating point numbers. These
vectors also contain functions to do elementary matrix arithmetic such as
normalization, dot product, cross product and scaling.
ImageX – This object represents a 2D or 3D image that can
be loaded, constructed and drawn on the screen.
CameraX – This object represents the positioning of a camera in 3D space. These can be manipulated to change the view, angle of view and zoom of the camera.
Point Modeling
To perform motion capture, it was necessary to keep track of the acceleration, velocity, position, and orientation of each of the sensors. This was accomplished in the software using three classes: Point, Elbow, and Wrist. The base class is Point, which contains the variables to keep track of the current sensor state, along with the variables and functions for filtering and averaging. The header of the Point class is shown below:
class Point { protected: Vector3DF offset; // offset value of
accelerometer (~183 = 0g) Vector3DF gravity; // Gravity directional vector ImageX image; // Image of a single "Dot" CameraX *cam; int dist; int prev_x; Point *parent; // The point which this point's position // depends
on. ie. the wrist's position // depends
on the elbow's position. void ForceMove(void); void LPFilter( Vector3DF
&a ); void HPFilter( Vector3DF
&v ); float NormalizeAngle(float
angle); float round( float a ); public: Point(); Point(Vector3DF _pos, int _dist,
Point *_parent, CameraX *_cam); void Run( Vector3DF t,
CameraX *c ); void Draw(); void Reset(); Vector3DF pos; Vector3DF vel; Vector3DF acc; float phi, theta, psi; };
The classes that are
directly used are Elbow and Wrist, which are derived from the Point class. They
contain redefinitions for the Run(), Draw(), and Reset() functions, since each
sensor should affect the position / orientation differently, and of course
should be drawn differently since they represent different points on the body.
The Elbow and Wrist class header definitions are shown below:
class Elbow
: public Point { public: Elbow(); Elbow(Vector3DF _pos, int _dist,
Point *_parent, CameraX *_cam); void Run( Vector3DF t ); void Draw(); private: }; class Wrist
: public Point { public: Wrist(); Wrist(Vector3DF _pos, int _dist,
Point *_parent, CameraX *_cam); void Run( Vector3DF t ); void Draw(); float x_avg; void Reset(); private: float
avg_vector[NUM_SAMPLES]; int oldest_ptr; int zero_cnt; void filter_X(void); };
The Elbow class determines
position and orientation solely by referencing the current measured direction
of gravity. The Wrist class determines position and orientation from the
current measured direction of gravity, and a numerical integration technique of
the rotation acceleration. For a more detailed description, refer to the high
level design and the Algorithms section below.
Algorithm
The motion capture point
modeling algorithms occur in the Run() functions within the Wrist and Elbow’s
classes. In Elbow’s Run function, first an offset is added to the raw
acceleration so that the acceleration is 0g centered. The LPFilter function
then removes small amplitude accelerations less than a magnitude of 2.0. The
phi and theta orientation angles are then calculated according to the formula
detailed in the high-level design section. Note that only phi and theta are
required to model the body; the velocity and position are relics of an older
version that drew the graphics with points and bars, and are retained here for
analysis purposes.
void
Elbow::Run( Vector3DF rawAcc ) { Vector3DF prev = pos; acc = rawAcc - OFFSET; LPFilter( acc ); float hyp = acc.Length(); phi = atan2( acc.y, acc.z ); theta = asin( acc.x/hyp ); if( theta > 45 ) phi = asin( acc.y/hyp ); vel.x = dist*sin( theta ); vel.y = dist*cos( phi ); vel.z = dist*sin( phi ); pos = parent->pos + vel; pos.x = vel.x; phi *= (180/PI); theta *= (180/PI); }
The Wrist’s Run function
behaves similarly to Elbow’s run function, except with the addition of the
filter_X function that applies averaging filters, velocity damping, and
numerical integration to determine the psi orientation angle.
void
Wrist::Run( Vector3DF rawAcc ) { // Get the acceleration values by
subtracting the DC offset acc = (rawAcc-OFFSET); // compute angles phi = atan2( acc.y, acc.z ); theta = atan2( acc.z, acc.x ); // lowpass filter the acceleration LPFilter( acc ); // filter x-axis acc further for
numerical integration filter_X(); //psi += acc.x; // update position based upon angles pos.x = dist*cos( psi-PI/2 ); pos.y = dist*cos( phi ) + dist*sin(
psi ); pos.z = dist*sin( phi ); // set your position based upon your
parent's pos = parent->pos + pos; // make sure you're always d away
from your parent Vector3DF d = pos - parent->pos; pos = parent->pos +
d*(dist/d.Length()); }
void
Wrist::filter_X(){ //---------- Do x-axis DC-blocker
----------// // implement y[n] = x[n] - x[n-1] +
R*y[n-1] float temp = acc.x; // x[n] value acc.x = temp - xn_1 + R*yn_1; // update y[n-1],x[n-1] yn_1 = acc.x; xn_1 = temp; //--------- End DC blocker
----------// //---------- Do Moving average
filter on acceleration ----------// // update the avg acceleration //
add the newest sample, subtract the oldest sample x_avg -=
avg_vector[oldest_ptr]/NUM_SAMPLES; avg_vector[oldest_ptr] = acc.x; x_avg += acc.x/NUM_SAMPLES; // put the newest sample in the
oldest sample spot avg_vector[oldest_ptr] = acc.x; // the next element is now the
oldest sample oldest_ptr++; if( oldest_ptr == NUM_SAMPLES ) oldest_ptr = 0; //---------- End Filtering
acceleration ----------// //- Magnitude shape the velocity and
Do Numerical Integration -// if( x_avg >= 0.f ) vel.x += log( x_avg+1 )/10; if( x_avg < 0.0f ) vel.x -= log( -1*x_avg + 1 )/10; if( -0.01f < vel.x &&
vel.x < 0.01f ) vel.x = 0; //--- End Magnitude shape velocity,
Num Integration ---// //---------- Damp the velocity
----------// if( x_avg > -.4 &&
x_avg < .4 ){ vel.x *= .1; zero_cnt++; } //---------- End Velocity damping
----------// //---------- Debounce velocity ----------// if( vel.x < -.5f &&
!vel_up ){ vel_down = true; }else if( vel.x
> .5f && !vel_down ){ vel_up = true; }else if(
zero_cnt >= 3 ){ vel_up = false; vel_down = false; zero_cnt = 0; } if( vel.x > 0 &&
vel_down ) vel.x = 0; if( vel.x < 0 &&
vel_up ) vel.x = 0; // - numerically integrate the
velocity to extract angular position --// //pos.x += vel.x; psi += vel.x/dist; // put bounds on the angle if( psi <= -PI/2 ) psi = -PI/2; if( psi >= PI/2 ) psi = PI/2; }
Serial Port Communication
We used the Microsoft
Windows API to interface to the serial port on the computer end. This was accomplished by using built-in
Windows functions documented in Microsoft’s MSDN. Using this method supports one of our goals – scalability – in
that, the application can then be run on a very wide range computers, using
Microsoft Windows 95 to XP and future Windows Operating Systems.
This documentation is
available via reference [m1]. Note that
this code is easily portable between VB, C, C++, C#, and is similar for other
types of hardware ports such as a parallel port (use “LPT1” instead of “COM1”).
Setup:
The interface to the
serial port requires inclusion of the windows header file and the global
definition of several variables and local (or global) definition of several
additional variables for access. The
variable definitions are:
// Include
the windows header file #include “windows.h” // Serial
Port Communication Objects HANDLE
hSerialPort; BYTE
Buffer[255]; DWORD
BytesRead; DWORD
Success; DCB MyDCB;
Where:
“windows.h” includes
the function calls to the serial port driver as well as object definitions for
BYTE (unsigned char), DWORD (unsigned int), HANDLE and DCB.
hSerialPort is a handle (or ID) to the serial port in use.
This object is used as a reference to the port when communicating with
Windows hardware drivers.
MyDCB is an object that specifies the control settings
for a serial communications device.
Buffer is used for physical I/O. The buffer may be of any data format, but
will be broken into BYTE-wise format in actual I/O.
BytesRead is a 32-bit integer containing the number of bytes
actually read or written to the serial port when an I/O is attempted.
Success is a 32-bit integer returned from any serial port API call, containing the result of the function call (failure, success or any other pertinent information.
Initializing the Port:
Three function calls are
required to initialize the serial port for communication. These calls are:
// build serial port handle hSerialPort = CreateFile("COM1", GENERIC_READ |
GENERIC_WRITE, 0, NULL, OPEN_EXISTING,
FILE_ATTRIBUTE_NORMAL, NULL); // set up port parameters Success = GetCommState(hSerialPort, &MyDCB); MyDCB.BaudRate = 9600; MyDCB.ByteSize = 8; MyDCB.Parity = NOPARITY; MyDCB.StopBits = ONESTOPBIT; Success =
SetCommState(hSerialPort, &MyDCB);
Where:
Calling CreateFile opens
“COM1” for I/O in generic read and generic write modes with normal file
attributes (only one program can have control of the port).
Calling GetCommState will
give the MyDCB object the properties of the current serial port handle. The DCB parameters are then set for normal
RS-232 communication at 9600 baud, with 8 data bites, no parity bits and one
stop bit.
Calling SetCommState will
then give the serial port handle the properties specified in MyDCB.
Communication:
Both data input and output
are simple, requiring only one function call.
Reading data is accomplished through:
Success = ReadFile(hSerialPort, Buffer, 255,
&BytesRead, NULL);
Where:
The function will attempt
to read 255 bytes of data from the computer’s serial port (specified by
hSerialPort) into data buffer Buffer and will display the total number of bytes
actually read in the variable BytesRead.
Note that this function is non-blocking and will read only the number of
bytes available in the computer’s serial port buffer.
Writing data is
accomplished through:
Success = WriteFile(hSerialPort, Buffer, Buffer.Length, &BytesRead, NULL)
Where:
The function will attempt
to write Buffer.Length bytes from Buffer into the computer’s serial port
(specified by hSerialPort) buffer and write them out to the port
independently. The function will return
the number of bytes actually written in BytesRead. Note that this function is also non-blocking as it copies the
contents of Buffer into the serial port buffer and the hardware writes the data
out independently.
Setting Port Timeouts:
Another important
consideration is properly setting the communication port timeouts. If not set properly, calling ReadFile and
WriteFile will become blocking functions and unnecessarily consume thousands of
CPU cycles. To set the I/O timeouts:
Success
= SetCommTimeouts(hSerialPort, MyCommTimeouts);
Success = GetCommTimeouts(hSerialPort, MyCommTimeouts);
// Modify the properties of MyCommTimeouts as appropriate.MyCommTimeouts.ReadIntervalTimeout = MAXDWORD;
MyCommTimeouts.ReadTotalTimeoutConstant = 1;
MyCommTimeouts.ReadTotalTimeoutMultiplier = MAXDWORD;
MyCommTimeouts.WriteTotalTimeoutConstant = 0;
MyCommTimeouts.WriteTotalTimeoutMultiplier = 0;
// Reconfigure the time-out settings, based on the properties of MyCommTimeouts.
Where:
MyCommTimeouts is a long pointer to a comm timeouts structure,
which has the properties:
ReadIntervalTimeout – Maximum allowable time between
bytes being received (in ms)
ReadTotalTimeoutConstant
– Total time out period for read operations (in ms)
ReadTotalTimeoutMultiplier
– Multiplier for total time out period
WriteTotalTimeoutConstant
– Total time out period for write operations (in ms)
WriteTotalTimeoutMultiplier
– Multiplier for total time out period
The MSDN states that by
setting ReadIntervalTimeout and ReadTotalTimeoutMultiplier to the
maximum DWORD (2^32) then when calling a ReadFile, the function will
return only what bytes are in the buffer, if there are no bytes in the buffer,
it will then block for a single byte recieve, or time out in ReadTotalTimeoutConstant
milliseconds. By setting this value
to 1, the function will read all bytes, or only block for a total of 1ms. Because a new packet is sent down the data
pipe at 100Hz (2.5 ms), then the maximum blocking time will be 1ms, which
allows 1.5 ms for running the rest of the code (which is more than enough).
Closing the Port:
The serial port specified by serial port handle can be closed and released by calling:
Success = CloseHandle(hSerialPort)
Error Handling:
In each of these function
calls so far, a DWORD result is returned, representing the status of the
function call. A simple error handler
can be implemented by using these function calls:
if( Success == 1 ) console->Printfn("Comm
Port Call Successful."); else{ // get error and display it LPVOID
lpMsgBuf; FormatMessage(
FORMAT_MESSAGE_ALLOCATE_BUFFER
| FORMAT_MESSAGE_FROM_SYSTEM
| FORMAT_MESSAGE_IGNORE_INSERTS, NULL, GetLastError(), MAKELANGID(LANG_NEUTRAL,
SUBLANG_DEFAULT), // Default language (LPTSTR)
&lpMsgBuf, 0, NULL ); console->Printfn("Communication
Error: %s", lpMsgBuf );
}
Where:
Success determines the
result of the previous call. A value of
1 means a successful call.
FormatMessage is used to get the last error message (GetLastError())
and display it as a string in the natural language of the computer.
LpMsgBuf is a pointer to a message buffer that will contain
the error description string.
Graphics
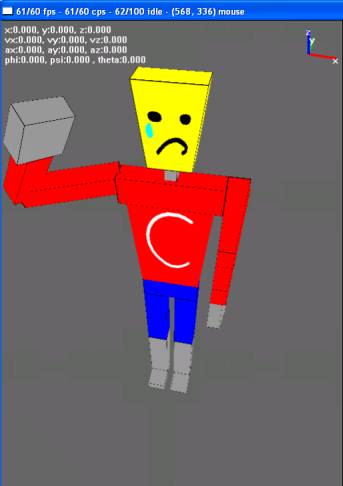
The body graphics is drawn
using a series of cubic polygons (102 to be exact) and bitmap textured. The
implementation is done in the Body class, and as far as the user is concerned,
there are only 4 public level functions: Draw, Reset, RotateElbow, and RotateWrist.
Reset resets all the angles to the default position, such that the right
arm is hanging by the side. The RotateElbow function takes in two
parameters, which are the phi and theta orientation angles. RotateWrist
takes in the phi and psi orientation angles. Refer to the high level design for
the angle definitions. The internal mechanics mostly consists of rotations and
transformations of the vertices and more details can be obtained from the code
in Appendix A. Figure (14) shows a
final screenshot.
Figure (14): Graphics Display Screenshot
Logging and Playback
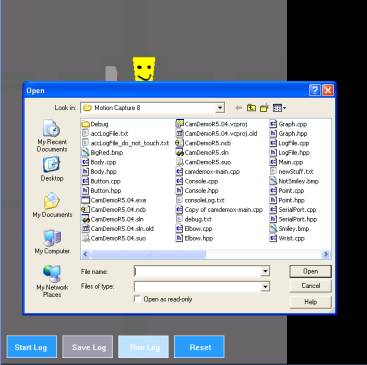
The logging and playback
feature allows the user to record acceleration data from the microcontroller
directly to file and open the file later to replay the corresponding motion in
the program. To start logging data, the Start Log button on the lower left
corner of the screen is clicked. When the user has finished collecting data,
the Save Log button can be clicked to stop logging and save the acceleration
log to a user specified file. To playback (run) a log file, the Run Log button
is clicked and the user selects a valid log file. The program has been set to
disable Run Log while a Start Log is being run and vice versa. The saved log
file is text formatted and contains the raw accelerations of the sensors.
Hence, the raw data can be exported to external programs such as matlab to
perform post analysis or other simulations.
A screenshot of loading data is shown below in figure (15).
Figure (15): Data Playback Screenshot
The motion capture logging
capability is implemented by the LogFile class whose class header
definition is shown below. The data members include a file handle to read and
write to a log file, a flag to indicate whether it is in data logging or playback
mode and a flag to indicate when it has reached the end of a log file in
playback mode.
Opening and Closing a File:
The OpenForWriting
and OpenForReading functions take in a file path text string parameter,
and open the file for writing or reading respectively. They return true on
success and false on failure if the file could not be opened. The Close
function closes a file if one is open. This
call is required when finished writing the log file.
Printing To and Reading From a Log File:
The Printf function
can write formatted text to the log file and returns true on success and
returns false otherwise. The function parameters are the same as the standard
ANSI-C printf() function, which provide dynamic text formatting
capability. To read from a file, the ReadLine() function is called. The
input parameter is the character buffer to hold the returned string. ReadLine
returns the number of characters read, or –1 if there is an error.
The class header definition is shown below:
class
LogFile { private: FILE *accLogFile; bool writeEn,
doneReadingLog; public: LogFile(); ~LogFile(); bool OpenForWriting(char*
fileName); bool OpenForReading(char*
fileName); void Close(); bool Printf(LPCSTR
lpszFormat, ...); int ReadLine(BYTE
buffer[]); bool IsLogFinished() {return
doneReadingLog;}; };
Console
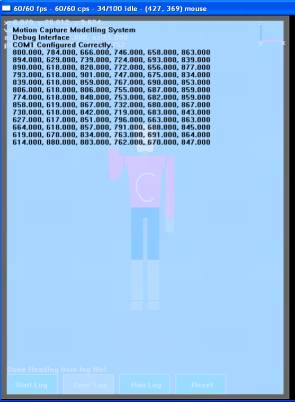
During the development of
the software code, there were many instances where we wished we could display
status / debugging text out to the screen in a manner similar to a dos command
prompt. Hence, we created the Console class, which allowed us to print
out useful information, both for us in developing the code and for the user. In
addition, the console provides file-logging capability, allowing printouts to
the console to be reviewed later in a log file stored on disk. Currently, the
console displays error messages and provides a raw print out of the
acceleration data obtained from the micro-controller. The “~” button on the
keyboard toggles the console on the screen, displaying or hiding the console as
necessary. A screenshot is shown below:
Figure (16): Console Screenshot
The Console class
structure is shown below:
class
Console { private: int x1, x2, y1, y2, maxLines,
maxChars; int locate_x, locate_y; bool showConsole; LISTSTR strBuffer; void NewLine(); void _Print(string
newString); FILE *logFile; HANDLE hBufferMutex; DWORD dwWaitResult; public: Console(); Console(char*
_logFileName, int x1, int y1, int x2, int y2); ~Console(); void SetSize(int x1, int y1, int x2, int y2); void Printf(LPCSTR
lpszFormat, ...); void _Printf(string
newString); void Printfn(LPCSTR
lpszFormat, ...); void _Printfn(string
newString); void Show() {showConsole = true;}; void Hide() {showConsole = false;}; void Toggle() {showConsole =
!showConsole;}; void Draw(); };
To use the console, first
a Console object needs to be instantiated. An example is shown below, where
printouts to the console are logged to the file “consoleLog.txt”, and the
console window will be drawn in the rectangle defined by the two screen
coordinate: (10,10) and (500,750).
Console *console; console = new Console("consoleLog.txt",
10,10,500,750);
Printouts to the screen
are now a simple matter of calling the various Print functions provided
by the console class. Input strings can be in either Standard Template Library
(STL) strings, or standard win32 format strings (ie. “toss in a number: %d”,
variableName) the same as those used in the win32 printf function.
console->Printfn("Motion
Capture Modeling System"); console->Printfn("Debug Interface");
Refer to Appendix A for code implementation details.
Graphs
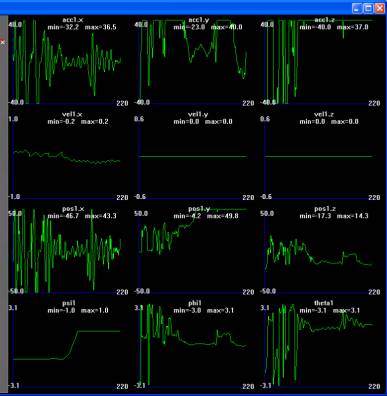
Another tool on our wish
list during coding and algorithm development was the capability to graph data
in real time. The result was the Graph class, which allows the acceleration,
velocity, position, orientation, or any other data and its history to be
presented on the screen. A screenshot
is shown below. This was an indispensable
tool in developing the numerical integration algorithm.
Figure (17): Motion Plotting Screenshot
To use the Graphs
class, a new Graph instance must first be created. The constructor consists of 7 parameters:
the title string, minimum y-axis value, maximum y-axis value, and the 2 points
(x1,y1) and (x2,y2) defining the rectangle on screen that the graph is to be
drawn on.
accGraph[0] = new
Graph("avg_acc1.x", -40, 40, 512, 0, 512+240, 190);
Adding a point to the
graph is accomplished by the AddPoint() function that takes in a float
argument as the value to be added. The point will be added to the end of the
data history list, and if the data list is full the first entry in the list
will be removed as the new entry is added.
accGraph[0]->AddPoint(wrist->x_avg);
To clear the entire graph,
the ClearAll() function is available, and there are the functions Show(),
Hide(), and Toggle to show or hide the graph.
The class header definition is shown below:
class Graph { private: float *ptBuffer; int *ptScreenBuffer; int numPoints; int startIndex; int nextIndex; int
x1,y1,x2,y2,ymag,xmid,ymid; int drawDeltaX; float yaxisMin, yaxisMax,
yaxisRange; float maxSeen, minSeen; bool showGraph, timeout; char txt_title[20],
txt_ymax[10], txt_ymin[10], txt_xmax[10], txt_minmaxSeen[40]; public: Graph(string _title, float
_yaxisMin, float _yaxisMax, int _x1, int _y1, int _x2, int _y2); ~Graph(); void SetSize(int _x1, int _y1, int _x2, int _y2); void AddPoint(float pt); void ClearAll(); void Draw(); void Show() {showGraph = true;}; void Hide() {showGraph = false;}; void Toggle() {showGraph =
!showGraph;}; void SetShowGraph(bool
_showGraph) {showGraph = _showGraph;}; };