module DE1_SoC_Computer (
////////////////////////////////////
// FPGA Pins
////////////////////////////////////
// Clock pins
CLOCK_50,
CLOCK2_50,
CLOCK3_50,
CLOCK4_50,
// ADC
ADC_CS_N,
ADC_DIN,
ADC_DOUT,
ADC_SCLK,
// Audio
AUD_ADCDAT,
AUD_ADCLRCK,
AUD_BCLK,
AUD_DACDAT,
AUD_DACLRCK,
AUD_XCK,
// SDRAM
DRAM_ADDR,
DRAM_BA,
DRAM_CAS_N,
DRAM_CKE,
DRAM_CLK,
DRAM_CS_N,
DRAM_DQ,
DRAM_LDQM,
DRAM_RAS_N,
DRAM_UDQM,
DRAM_WE_N,
// I2C Bus for Configuration of the Audio and Video-In Chips
FPGA_I2C_SCLK,
FPGA_I2C_SDAT,
// 40-Pin Headers
GPIO_0,
GPIO_1,
// Seven Segment Displays
HEX0,
HEX1,
HEX2,
HEX3,
HEX4,
HEX5,
// IR
IRDA_RXD,
IRDA_TXD,
// Pushbuttons
KEY,
// LEDs
LEDR,
// PS2 Ports
PS2_CLK,
PS2_DAT,
PS2_CLK2,
PS2_DAT2,
// Slider Switches
SW,
// Video-In
TD_CLK27,
TD_DATA,
TD_HS,
TD_RESET_N,
TD_VS,
// VGA
VGA_B,
VGA_BLANK_N,
VGA_CLK,
VGA_G,
VGA_HS,
VGA_R,
VGA_SYNC_N,
VGA_VS,
////////////////////////////////////
// HPS Pins
////////////////////////////////////
// DDR3 SDRAM
HPS_DDR3_ADDR,
HPS_DDR3_BA,
HPS_DDR3_CAS_N,
HPS_DDR3_CKE,
HPS_DDR3_CK_N,
HPS_DDR3_CK_P,
HPS_DDR3_CS_N,
HPS_DDR3_DM,
HPS_DDR3_DQ,
HPS_DDR3_DQS_N,
HPS_DDR3_DQS_P,
HPS_DDR3_ODT,
HPS_DDR3_RAS_N,
HPS_DDR3_RESET_N,
HPS_DDR3_RZQ,
HPS_DDR3_WE_N,
// Ethernet
HPS_ENET_GTX_CLK,
HPS_ENET_INT_N,
HPS_ENET_MDC,
HPS_ENET_MDIO,
HPS_ENET_RX_CLK,
HPS_ENET_RX_DATA,
HPS_ENET_RX_DV,
HPS_ENET_TX_DATA,
HPS_ENET_TX_EN,
// Flash
HPS_FLASH_DATA,
HPS_FLASH_DCLK,
HPS_FLASH_NCSO,
// Accelerometer
HPS_GSENSOR_INT,
// General Purpose I/O
HPS_GPIO,
// I2C
HPS_I2C_CONTROL,
HPS_I2C1_SCLK,
HPS_I2C1_SDAT,
HPS_I2C2_SCLK,
HPS_I2C2_SDAT,
// Pushbutton
HPS_KEY,
// LED
HPS_LED,
// SD Card
HPS_SD_CLK,
HPS_SD_CMD,
HPS_SD_DATA,
// SPI
HPS_SPIM_CLK,
HPS_SPIM_MISO,
HPS_SPIM_MOSI,
HPS_SPIM_SS,
// UART
HPS_UART_RX,
HPS_UART_TX,
// USB
HPS_CONV_USB_N,
HPS_USB_CLKOUT,
HPS_USB_DATA,
HPS_USB_DIR,
HPS_USB_NXT,
HPS_USB_STP
);
//=======================================================
// PARAMETER declarations
//=======================================================
//=======================================================
// PORT declarations
//=======================================================
////////////////////////////////////
// FPGA Pins
////////////////////////////////////
// Clock pins
input CLOCK_50;
input CLOCK2_50;
input CLOCK3_50;
input CLOCK4_50;
// ADC
inout ADC_CS_N;
output ADC_DIN;
input ADC_DOUT;
output ADC_SCLK;
// Audio
input AUD_ADCDAT;
inout AUD_ADCLRCK;
inout AUD_BCLK;
output AUD_DACDAT;
inout AUD_DACLRCK;
output AUD_XCK;
// SDRAM
output [12: 0] DRAM_ADDR;
output [ 1: 0] DRAM_BA;
output DRAM_CAS_N;
output DRAM_CKE;
output DRAM_CLK;
output DRAM_CS_N;
inout [15: 0] DRAM_DQ;
output DRAM_LDQM;
output DRAM_RAS_N;
output DRAM_UDQM;
output DRAM_WE_N;
// I2C Bus for Configuration of the Audio and Video-In Chips
output FPGA_I2C_SCLK;
inout FPGA_I2C_SDAT;
// 40-pin headers
inout [35: 0] GPIO_0;
inout [35: 0] GPIO_1;
// Seven Segment Displays
output [ 6: 0] HEX0;
output [ 6: 0] HEX1;
output [ 6: 0] HEX2;
output [ 6: 0] HEX3;
output [ 6: 0] HEX4;
output [ 6: 0] HEX5;
// IR
input IRDA_RXD;
output IRDA_TXD;
// Pushbuttons
input [ 3: 0] KEY;
// LEDs
output [ 9: 0] LEDR;
// PS2 Ports
inout PS2_CLK;
inout PS2_DAT;
inout PS2_CLK2;
inout PS2_DAT2;
// Slider Switches
input [ 9: 0] SW;
// Video-In
input TD_CLK27;
input [ 7: 0] TD_DATA;
input TD_HS;
output TD_RESET_N;
input TD_VS;
// VGA
output [ 7: 0] VGA_B;
output VGA_BLANK_N;
output VGA_CLK;
output [ 7: 0] VGA_G;
output VGA_HS;
output [ 7: 0] VGA_R;
output VGA_SYNC_N;
output VGA_VS;
////////////////////////////////////
// HPS Pins
////////////////////////////////////
// DDR3 SDRAM
output [14: 0] HPS_DDR3_ADDR;
output [ 2: 0] HPS_DDR3_BA;
output HPS_DDR3_CAS_N;
output HPS_DDR3_CKE;
output HPS_DDR3_CK_N;
output HPS_DDR3_CK_P;
output HPS_DDR3_CS_N;
output [ 3: 0] HPS_DDR3_DM;
inout [31: 0] HPS_DDR3_DQ;
inout [ 3: 0] HPS_DDR3_DQS_N;
inout [ 3: 0] HPS_DDR3_DQS_P;
output HPS_DDR3_ODT;
output HPS_DDR3_RAS_N;
output HPS_DDR3_RESET_N;
input HPS_DDR3_RZQ;
output HPS_DDR3_WE_N;
// Ethernet
output HPS_ENET_GTX_CLK;
inout HPS_ENET_INT_N;
output HPS_ENET_MDC;
inout HPS_ENET_MDIO;
input HPS_ENET_RX_CLK;
input [ 3: 0] HPS_ENET_RX_DATA;
input HPS_ENET_RX_DV;
output [ 3: 0] HPS_ENET_TX_DATA;
output HPS_ENET_TX_EN;
// Flash
inout [ 3: 0] HPS_FLASH_DATA;
output HPS_FLASH_DCLK;
output HPS_FLASH_NCSO;
// Accelerometer
inout HPS_GSENSOR_INT;
// General Purpose I/O
inout [ 1: 0] HPS_GPIO;
// I2C
inout HPS_I2C_CONTROL;
inout HPS_I2C1_SCLK;
inout HPS_I2C1_SDAT;
inout HPS_I2C2_SCLK;
inout HPS_I2C2_SDAT;
// Pushbutton
inout HPS_KEY;
// LED
inout HPS_LED;
// SD Card
output HPS_SD_CLK;
inout HPS_SD_CMD;
inout [ 3: 0] HPS_SD_DATA;
// SPI
output HPS_SPIM_CLK;
input HPS_SPIM_MISO;
output HPS_SPIM_MOSI;
inout HPS_SPIM_SS;
// UART
input HPS_UART_RX;
output HPS_UART_TX;
// USB
inout HPS_CONV_USB_N;
input HPS_USB_CLKOUT;
inout [ 7: 0] HPS_USB_DATA;
input HPS_USB_DIR;
input HPS_USB_NXT;
output HPS_USB_STP;
//=======================================================
// REG/WIRE declarations
//=======================================================
///inital velocity
reg [9:0] dx = 0;
wire signed [9:0] dy_init;
assign dy_init = SW;
wire [3:0] h1;
wire [3:0] h2;
wire [3:0] h3;
wire [3:0] h4;
wire [3:0] h5;
wire [3:0] h6;
assign h1 = SW[7:0] >10'd_0 ? (SW[7:0] >10'd_1 ? 4'd_8 : 4'd_1) : 4'h_f;
assign h2 = SW[7:0] >10'd_2 ? (SW[7:0] >10'd_4 ? 4'd_8: 4'd_1):4'h_f ;
assign h3 = SW[7:0] >10'd_8 ? (SW[7:0] >10'd_16 ? 4'd_8: 4'd_1):4'h_f ;
assign h4 = SW[7:0] >10'd_32 ? (SW[7:0] >10'd_64 ? 4'd_8: 4'd_1):4'h_f ;
assign h5 = SW[7:0] >10'd_128 ? (SW[7:0] >10'd_256 ? 4'd_8: 4'd_1):4'h_f ;
assign h6 = 4'h_f ;
HexDigit Digit0(HEX0, h1);
HexDigit Digit1(HEX1, h2);
HexDigit Digit2(HEX2, h3);
HexDigit Digit3(HEX3, h4);
HexDigit Digit4(HEX4, h5);
HexDigit Digit5(HEX5, h6);
// VGA clock and reset lines
wire vga_pll_lock;
wire vga_pll;
reg vga_reset;
localparam TRI_W = 10'd_40;
localparam R_WALL = 10'd_531, L_WALL = 10'd_107, T_WALL = 10'd_25;
localparam WALL_W = 10'd_5;
localparam SEC_PER_CYCLE = 29'sd_1;
localparam radius = 10'sd_5;
localparam radius_square = 10'sd_30;
// M10k memory control and data
wire [7:0] M10k_out;
reg [7:0] color_reg;
wire [18:0] write_address;
reg [18:0] read_address;
reg write_enable;
// M10k memory clock
wire M10k_pll;
wire M10k_pll_locked;
// Wires for connecting VGA driver to memory
wire [9:0] next_x;
wire [9:0] next_y;
// wires for connecting iterator to memory
reg [9:0] write_x;
reg [9:0] write_y;
reg [7:0] cur_pixel_color;
wire [7:0] read_color;
wire cabinet_wall;
// details of pinball location and movement
reg [9:0] hold_x, hold_y, ball_x, ball_y;
wire signed [28:0] step_x, step_y;
reg signed [28:0] accum_x, accum_y;
// calculate next pinball velocity
reg signed [19:0] vel_x, vel_y;
wire signed [19:0] next_vel_x, next_vel_y;
wire signed [19:0] norm_x, norm_y;
reg [19:0] cycle_count;
//circle variables
reg signed [9:0] xc;//circle iterators
reg signed [9:0] yc;
wire signed [9:0] xc2;
wire signed [9:0] yc2;
reg signed [9:0] xc_clear;
reg signed [9:0] yc_clear;
wire signed [9:0] xc2_clear;
wire signed [9:0] yc2_clear;
reg [9:0] center_x_clear, center_y_clear;//starting point for clearing
wire [9:0] circle_x;
wire [9:0] circle_y;
wire [9:0] circle_x_clear;
wire [9:0] circle_y_clear;
reg detect_coll;//used to ensure not detecting collision when drawing
reg init;
reg no_update;//b/c unable to detect coll in drawing, need to make sure that if drawing
//is when colliding, don't reenter collision but enter ~update_vell
wire ball_colide;//used to know what to set no_update
reg draw_x;//used to indicate whether to draw new ball
reg draw_y;
assign circle_x = xc + ball_x ;
assign circle_y = (hold_y + yc > 10'd_479)? 10'd_479 : ball_y + yc ;
assign circle_x_clear = xc_clear + center_x_clear ;
assign circle_y_clear = (center_y_clear + yc_clear > 10'd_479)? 10'd_479 : center_y_clear + yc_clear ;
update_velocities up_vel (
.vel_x(vel_x),
.vel_y(vel_y),
.norm_x(norm_x),
.norm_y(norm_y),
.next_vel_x(next_vel_x),
.next_vel_y(next_vel_y)
);
norm_vector find_norm (
.reset(~KEY[0]),
.clk(M10k_pll),
.x(write_x),
.y(write_y),
.l_move_up(l_old_pos),
.r_move_up(r_old_pos),
.R_WALL(R_WALL),
.L_WALL(L_WALL),
.T_WALL(T_WALL),
.TRI_W(TRI_W),
.WALL_W(WALL_W),
.radius(radius),
.detect_coll(detect_coll),
.no_update(no_update),
.norm_x(norm_x),
.norm_y(norm_y)
);
// state of
reg [7:0] state, debug_state;
reg game_over;
// drawing the paddles of the game
wire [9:0] l_paddle_x, l_paddle_y, r_paddle_x, r_paddle_y;
wire l_paddle_done, r_paddle_done;
reg l_reset_paddle, r_reset_paddle;
reg l_old_pos, r_old_pos, l_cur_pos, r_cur_pos;
reg l_update, r_update;
wire [7:0] left_color, right_color;
redraw_paddle redraw_left (
.clk(M10k_pll),
.reset(l_reset_paddle),
.update(l_update),
.left_paddle(1'd_1),
.old_pos(l_old_pos),
.new_pos(l_cur_pos),
.start_x(L_WALL + TRI_W),
.start_y(10'd_480 - TRI_W),
.slope(10'd_4),
.width(10'd_99),
.cur_x(l_paddle_x),
.cur_y(l_paddle_y),
.color_reg(left_color),
.done(l_paddle_done)
);
redraw_paddle redraw_right (
.clk(M10k_pll),
.reset(r_reset_paddle),
.update(r_update),
.left_paddle(1'd_0),
.old_pos(r_old_pos),
.new_pos(r_cur_pos),
.start_x(R_WALL - TRI_W - TRI_W),
.start_y(10'd_480 - TRI_W),
.slope(10'd_4),
.width(10'd_99),
.cur_x(r_paddle_x),
.cur_y(r_paddle_y),
.color_reg(right_color),
.done(r_paddle_done)
);
always@(posedge M10k_pll) begin
if (~KEY[0]) begin // Zero everything in reset
state <= 8'd_1;
vga_reset <= 1'b_1;
write_enable <= 1'd_0;
write_x <= 10'd_0;
write_y <= 10'd_0;
vel_x <= 20'sd_0;
vel_y <= {~{2'd_0, SW[7:0]} + 10'sd_1, 10'd_0};
game_over <= 1'd_0;
cycle_count <= 20'd_0;
r_reset_paddle <= 1'd_1;
l_reset_paddle <= 1'd_1;
l_old_pos <= 1'd_0;
r_old_pos <= 1'd_0;
l_cur_pos <= 1'd_0;
r_cur_pos <= 1'd_0;
r_update <= 1'd_0;
l_update <= 1'd_0;
cur_pixel_color <= 8'b_111_111_11;
debug_state <= 8'd_0;
no_update <= 1'd0;
detect_coll <= 1'd1;
ball_y <= 10'd_479;
ball_x <= (TRI_W - WALL_W)/2 + (R_WALL - TRI_W + WALL_W);
draw_x <= 1'b0;
draw_y <= 1'b0;
center_x_clear <= (TRI_W - WALL_W)/2 + (R_WALL - TRI_W + WALL_W);
center_y_clear <= 10'd_479;
xc <= -radius;
yc <= -radius;
xc_clear <= -radius;
yc_clear <= -radius;
end else begin
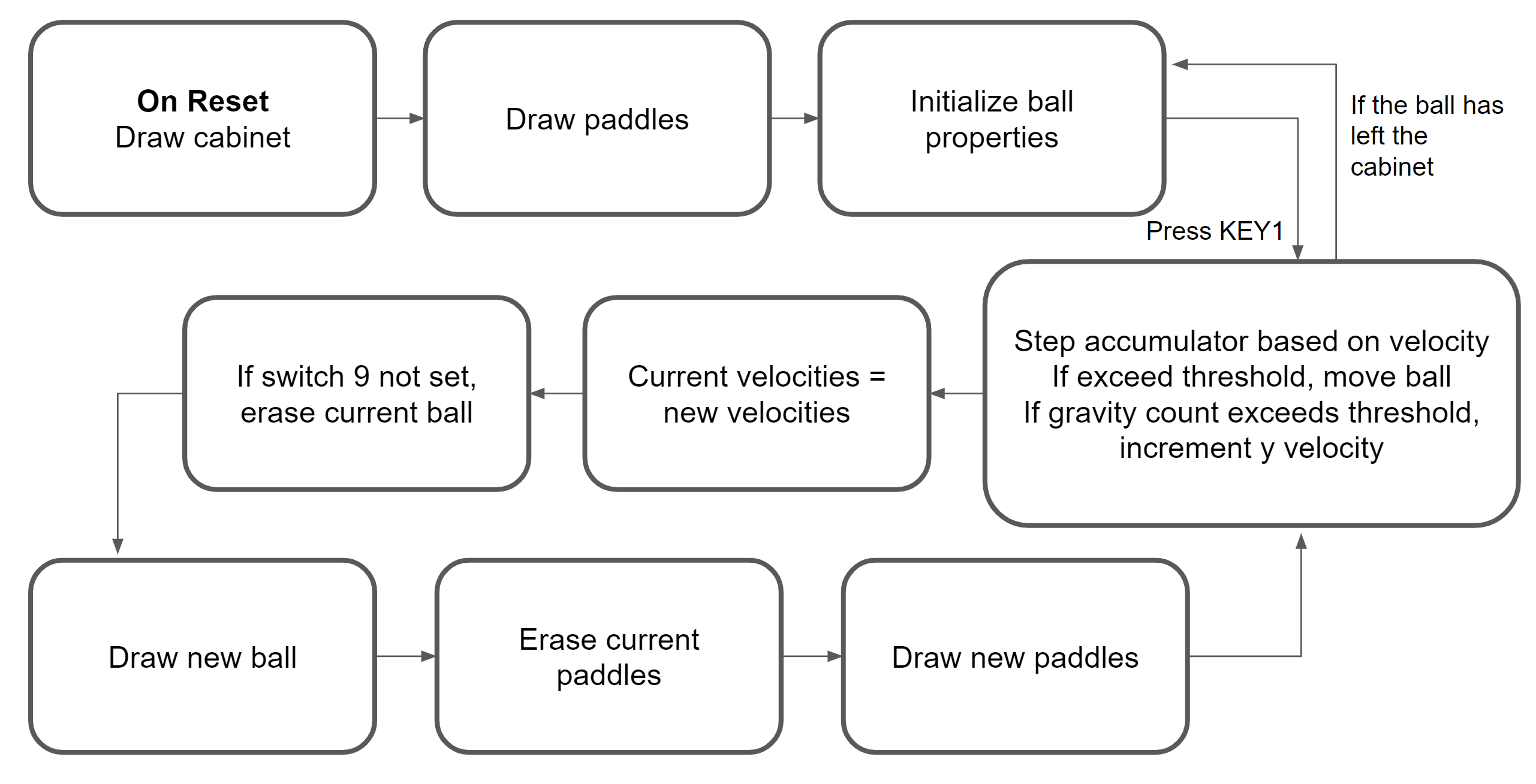
// initial drawing of cabinet
if (state == 8'd_1) begin
vga_reset <= 1'b_0;
write_enable <= 1'd_1;
if (cabinet_wall) color_reg <= 8'b_000_000_00; // walls of cabinet are black
else color_reg <= 8'b_111_111_11; // background of cabinet is white
state <= 8'd_2;
end
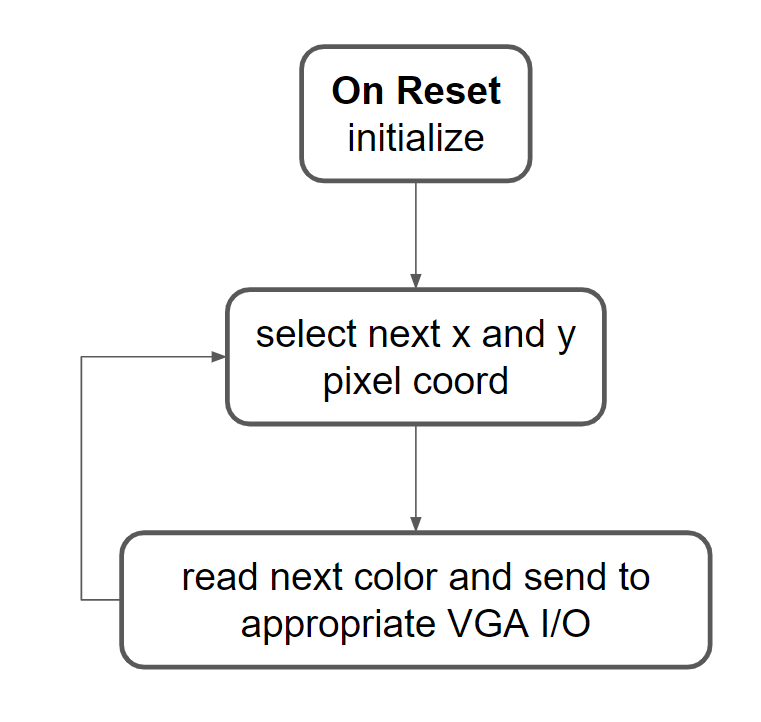
// in initial drawing, move to next pixel coordinate and repeat process
if (state == 8'd_2) begin
write_enable <= 1'd_0;
if (write_y == 10'd_479) begin
write_y <= 10'd_0;
if (write_x == 10'd_639) begin
write_x <= 10'd_0;
end else begin
write_x <= write_x + 10'd_1;
end
end else begin
write_y <= write_y + 10'd_1;
end
r_reset_paddle <= 1'd_1;
l_reset_paddle <= 1'd_1;
if (write_y == 10'd_479 && write_x == 10'd_639) state <= 8'd_3; // done with initial drawing
else state <= 8'd_1; // repeat
end
if (state == 8'd_3) begin
write_enable <= 1'd_1;
write_x <= l_paddle_x;
write_y <= l_paddle_y;
color_reg <= left_color;
l_reset_paddle <= 1'd_0;
state <= 8'd_4;
end
if (state == 8'd_4) begin // initial drawing of left paddle
color_reg <= left_color;
write_x <= l_paddle_x;
write_y <= l_paddle_y;
r_reset_paddle <= 1'd_1;
if (l_paddle_done) state <= 8'd_5;
else state <= 8'd_4;
end
if (state == 8'd_5) begin
r_reset_paddle <= 1'd_0;
color_reg <= right_color;
write_x <= r_paddle_x;
write_y <= r_paddle_y;
state <= 8'd_6;
end
if (state == 8'd_6) begin // initial drawing of right paddle
write_x <= r_paddle_x;
write_y <= r_paddle_y;
color_reg <= right_color;
if (r_paddle_done) state <= 8'd_7;
else state <= 8'd_6;
end
// intialize ball properties
if (state == 8'd_7) begin
write_enable <= 1'd_0;
color_reg <= 8'b_010_100_10;
write_y <= 10'd_479;
write_x <= (TRI_W - WALL_W)/2 + (R_WALL - TRI_W + WALL_W);
ball_y <= 10'd_479;
ball_x <= (TRI_W - WALL_W)/2 + (R_WALL - TRI_W + WALL_W);
accum_x <= 29'd_0;
accum_y <= 29'd_0;
vel_x <= 20'sd_0;
vel_y <= {~{2'd_0, SW[7:0]} + 10'sd_1, 10'd_0};
cur_pixel_color <= 8'b_111_111_11;
if (~KEY[1]) state <= 8'd_8;
else state <= 8'd_7;
end
if (state == 8'd_8) begin
game_over <= 1'd_0;
write_enable <= 1'd_0;
vel_x <= next_vel_x;
if (cycle_count == 20'd_24) begin
cycle_count <= 20'd_0;
vel_y <= next_vel_y + 20'sd_5;
end else begin
vel_y <= next_vel_y;
cycle_count <= cycle_count + 20'd_1;
end
if (accum_y >= 29'sd_167772) begin
accum_y <= accum_y - 29'd_167772 + step_y;
write_y <= write_y + 10'd_1;
ball_y <= ball_y + 10'd_1;
draw_y <= 1'b1;
end else if (accum_y <= -29'sd_167772) begin
accum_y <= accum_y + 29'd_167772 + step_y;
write_y <= write_y - 10'd_1;
ball_y <= ball_y - 10'd_1;
draw_y <= 1'b1;
end else begin
accum_y <= accum_y + step_y;
draw_y <= 1'b0;
end
if (accum_x >= 29'sd_167772) begin
accum_x <= accum_x - 29'd_167772 + step_x;
write_x <= write_x + 10'd_1;
ball_x <= ball_x + 10'd_1;
draw_x <= 1'b1;
end else if (accum_x <= -29'sd_167772) begin
accum_x <= accum_x + 29'd_167772 + step_x;
write_x <= write_x - 10'd_1;
ball_x <= ball_x - 10'd_1;
draw_x <= 1'b1;
end else begin
accum_x <= accum_x + step_x;
draw_x <= 1'b0;
end
l_reset_paddle <= 1'd_1;
xc <= -radius;//reset iterators for drawing circles
yc <= -radius;
xc_clear <= -radius;
yc_clear <= -radius;
if (accum_y >= 29'sd_167772 && write_y == 10'd_479)begin
state <= 8'd_21;
end
else begin
state <= 8'd_9;
end
detect_coll <= 1'b0;
end
if (state == 8'd_9) begin
write_enable <= 1'd_1;
vel_x <= next_vel_x;
vel_y <= next_vel_y;
write_x <= ball_x;
write_y <= ball_y;
if(draw_x || draw_y) begin//draw new ball position
state <= 8'd_17;
end
else begin
state <= 8'd_10;
end
end
if (state == 8'd_10) begin
hold_x <= write_x;
hold_y <= write_y;
l_reset_paddle <= 1'd_1;
l_cur_pos <= ~KEY[3];
l_update <= ~(~KEY[3] == l_old_pos);
state <= 8'd_13;
end
if (state == 8'd_13) begin
write_x <= l_paddle_x;
write_y <= l_paddle_y;
color_reg <= left_color;
l_reset_paddle <= 1'd_0;
state <= 8'd_14;
end
if (state == 8'd_14) begin
color_reg <= left_color;
write_x <= l_paddle_x;
write_y <= l_paddle_y;
r_reset_paddle <= 1'd_1;
r_cur_pos <= ~KEY[2];
r_update <= ~(~KEY[2] == r_old_pos);
if (l_paddle_done) begin
l_old_pos <= l_cur_pos;
state <= 8'd_15;
end else state <= 8'd_14;
end
if (state == 8'd_15) begin
r_reset_paddle <= 1'd_0;
color_reg <= right_color;
write_x <= r_paddle_x;
write_y <= r_paddle_y;
state <= 8'd_16;
end
if (state == 8'd_16) begin
if (r_paddle_done) begin
r_old_pos <= r_cur_pos;
write_x <= hold_x;
write_y <= hold_y;
color_reg <= 8'b_010_100_10;
write_enable <= 1'd_0;
detect_coll <= 1'd1; //set to 1 so that in stage 8 detects collisions
state <= 8'd_8;
end else begin
write_x <= r_paddle_x;
write_y <= r_paddle_y;
color_reg <= right_color;
state <= 8'd_16;
end
end
//transition state
if(state == 8'd17) begin
if (SW[9]) begin
state <= 8'd18;//change to 18 to skip clearing
write_x <= ball_x;
write_y <= ball_y;
color_reg <= 8'b_010_100_10;
end else begin
state <= 8'd19;//change to 19 if you want to clear before writing
color_reg <= 8'b_111_111_11;
end
end
//draw ball
if(state == 8'd_18)begin
color_reg <= 8'b_010_100_10;
draw_y <= 1'b0;
draw_x <= 1'b0;
center_y_clear <= ball_y;
center_x_clear <= ball_x;
if(xc2 + yc2 <= radius_square)begin
write_x <= circle_x;
write_y <= circle_y;
end
if(xc == radius) begin
xc <= -radius;
yc <= yc + 10'sd_1;
end
else begin
xc <= xc + 10'sd_1;
yc <= yc;
end
if((xc == radius) & (yc == radius)) begin
state <= 8'd_9;
end
else begin
state <= 8'd_18;
end
end
//clear ball
if(state == 8'd_19)begin
color_reg <= 8'b_111_111_11;
if(xc2_clear + yc2_clear <= radius_square)begin
write_x <= circle_x_clear;
write_y <= circle_y_clear;
end
if(xc_clear == radius) begin
xc_clear <= -radius;
yc_clear <= yc_clear + 10'sd_1;
end
else begin
xc_clear <= xc_clear + 10'sd_1;
yc_clear <= yc_clear;
end
if((xc_clear == radius) & (yc_clear == radius)) begin
state <= 8'd18;
write_x <= ball_x;
write_y <= ball_y;
end
else begin
state <= 8'd_19;
end
end
if (state == 8'd_21) begin
game_over <= 1'd_1;
cycle_count <= 20'd_0;
r_reset_paddle <= 1'd_1;
l_reset_paddle <= 1'd_1;
l_old_pos <= 1'd_0;
r_old_pos <= 1'd_0;
l_cur_pos <= 1'd_0;
r_cur_pos <= 1'd_0;
r_update <= 1'd_0;
l_update <= 1'd_0;
cur_pixel_color <= 8'b_111_111_11;
debug_state <= 8'd_0;
detect_coll <= 1'd1;
draw_x <= 1'b0;
draw_y <= 1'b0;
center_x_clear <= (TRI_W - WALL_W)/2 + (R_WALL - TRI_W + WALL_W);
center_y_clear <= 10'd_479;
xc <= -radius;
yc <= -radius;
xc_clear <= -radius;
yc_clear <= -radius;
write_enable <= 1'd_0;
color_reg <= 8'b_010_100_10;
write_y <= 10'd_479;
write_x <= (TRI_W - WALL_W)/2 + (R_WALL - TRI_W + WALL_W);
ball_y <= 10'd_479;
ball_x <= (TRI_W - WALL_W)/2 + (R_WALL - TRI_W + WALL_W);
accum_x <= 29'd_0;
accum_y <= 29'd_0;
vel_x <= 20'sd_0;
vel_y <= {~{2'd_0, SW[7:0]} + 10'sd_1, 10'd_0};
cur_pixel_color <= 8'b_111_111_11;
if (~KEY[1]) state <= 8'd_8;
else state <= 8'd_21;
end
end
end
detect_collision init_cabinet (
.x(write_x),
.y(write_y),
.TRI_W(TRI_W),
.R_WALL(R_WALL),
.L_WALL(L_WALL),
.T_WALL(T_WALL),
.WALL_W(WALL_W),
.collision(cabinet_wall)
);
signed_mult calc_step_y (
.out(step_y),
.a(SEC_PER_CYCLE),
.b(vel_y)
);
signed_mult calc_step_x (
.out(step_x),
.a(SEC_PER_CYCLE),
.b(vel_x)
);
circle_signed_mult cx (
.out(xc2),
.a(xc),
.b(xc)
);
circle_signed_mult cy (
.out(yc2),
.a(yc),
.b(yc)
);
circle_signed_mult cx_clear (
.out(xc2_clear),
.a(xc_clear),
.b(xc_clear)
);
circle_signed_mult cy_clear (
.out(yc2_clear),
.a(yc_clear),
.b(yc_clear)
);
M10K_1000_8 pixel_data(
.data_a(color_reg), // a is for pixel writing
.q_a(read_color),
.addr_a((19'd_640*write_y) + write_x),
.we_a(write_enable),
.data_b(8'd_0), // b is for the VGA controls
.q_b(M10k_out),
.addr_b((19'd_640*next_y) + next_x),
.we_b(1'd_0),
.clk(M10k_pll)
);
// Instantiate VGA driver
vga_driver driver(
.clock(vga_pll),
.reset(vga_reset),
.color_in(M10k_out), // Pixel color (8-bit) from memory
.next_x(next_x), // This (and next_y) used to specify memory read address
.next_y(next_y), // This (and next_x) used to specify memory read address
.hsync(VGA_HS),
.vsync(VGA_VS),
.red(VGA_R),
.green(VGA_G),
.blue(VGA_B),
.sync(VGA_SYNC_N),
.clk(VGA_CLK),
.blank(VGA_BLANK_N)
);
//=======================================================
// Structural coding
//=======================================================
// From Qsys
Computer_System The_System (
////////////////////////////////////
// FPGA Side
////////////////////////////////////
.vga_pio_locked_export (vga_pll_lock), // vga_pio_locked.export
.vga_pio_outclk0_clk (vga_pll), // vga_pio_outclk0.clk
.m10k_pll_locked_export (M10k_pll_locked), // m10k_pll_locked.export
.m10k_pll_outclk0_clk (M10k_pll), // m10k_pll_outclk0.clk
// Global signals
.system_pll_ref_clk_clk (CLOCK_50),
.system_pll_ref_reset_reset (1'b0),
////////////////////////////////////
// HPS Side
////////////////////////////////////
// DDR3 SDRAM
.memory_mem_a (HPS_DDR3_ADDR),
.memory_mem_ba (HPS_DDR3_BA),
.memory_mem_ck (HPS_DDR3_CK_P),
.memory_mem_ck_n (HPS_DDR3_CK_N),
.memory_mem_cke (HPS_DDR3_CKE),
.memory_mem_cs_n (HPS_DDR3_CS_N),
.memory_mem_ras_n (HPS_DDR3_RAS_N),
.memory_mem_cas_n (HPS_DDR3_CAS_N),
.memory_mem_we_n (HPS_DDR3_WE_N),
.memory_mem_reset_n (HPS_DDR3_RESET_N),
.memory_mem_dq (HPS_DDR3_DQ),
.memory_mem_dqs (HPS_DDR3_DQS_P),
.memory_mem_dqs_n (HPS_DDR3_DQS_N),
.memory_mem_odt (HPS_DDR3_ODT),
.memory_mem_dm (HPS_DDR3_DM),
.memory_oct_rzqin (HPS_DDR3_RZQ),
// Ethernet
.hps_io_hps_io_gpio_inst_GPIO35 (HPS_ENET_INT_N),
.hps_io_hps_io_emac1_inst_TX_CLK (HPS_ENET_GTX_CLK),
.hps_io_hps_io_emac1_inst_TXD0 (HPS_ENET_TX_DATA[0]),
.hps_io_hps_io_emac1_inst_TXD1 (HPS_ENET_TX_DATA[1]),
.hps_io_hps_io_emac1_inst_TXD2 (HPS_ENET_TX_DATA[2]),
.hps_io_hps_io_emac1_inst_TXD3 (HPS_ENET_TX_DATA[3]),
.hps_io_hps_io_emac1_inst_RXD0 (HPS_ENET_RX_DATA[0]),
.hps_io_hps_io_emac1_inst_MDIO (HPS_ENET_MDIO),
.hps_io_hps_io_emac1_inst_MDC (HPS_ENET_MDC),
.hps_io_hps_io_emac1_inst_RX_CTL (HPS_ENET_RX_DV),
.hps_io_hps_io_emac1_inst_TX_CTL (HPS_ENET_TX_EN),
.hps_io_hps_io_emac1_inst_RX_CLK (HPS_ENET_RX_CLK),
.hps_io_hps_io_emac1_inst_RXD1 (HPS_ENET_RX_DATA[1]),
.hps_io_hps_io_emac1_inst_RXD2 (HPS_ENET_RX_DATA[2]),
.hps_io_hps_io_emac1_inst_RXD3 (HPS_ENET_RX_DATA[3]),
// Flash
.hps_io_hps_io_qspi_inst_IO0 (HPS_FLASH_DATA[0]),
.hps_io_hps_io_qspi_inst_IO1 (HPS_FLASH_DATA[1]),
.hps_io_hps_io_qspi_inst_IO2 (HPS_FLASH_DATA[2]),
.hps_io_hps_io_qspi_inst_IO3 (HPS_FLASH_DATA[3]),
.hps_io_hps_io_qspi_inst_SS0 (HPS_FLASH_NCSO),
.hps_io_hps_io_qspi_inst_CLK (HPS_FLASH_DCLK),
// Accelerometer
.hps_io_hps_io_gpio_inst_GPIO61 (HPS_GSENSOR_INT),
//.adc_sclk (ADC_SCLK),
//.adc_cs_n (ADC_CS_N),
//.adc_dout (ADC_DOUT),
//.adc_din (ADC_DIN),
// General Purpose I/O
.hps_io_hps_io_gpio_inst_GPIO40 (HPS_GPIO[0]),
.hps_io_hps_io_gpio_inst_GPIO41 (HPS_GPIO[1]),
// I2C
.hps_io_hps_io_gpio_inst_GPIO48 (HPS_I2C_CONTROL),
.hps_io_hps_io_i2c0_inst_SDA (HPS_I2C1_SDAT),
.hps_io_hps_io_i2c0_inst_SCL (HPS_I2C1_SCLK),
.hps_io_hps_io_i2c1_inst_SDA (HPS_I2C2_SDAT),
.hps_io_hps_io_i2c1_inst_SCL (HPS_I2C2_SCLK),
// Pushbutton
.hps_io_hps_io_gpio_inst_GPIO54 (HPS_KEY),
// LED
.hps_io_hps_io_gpio_inst_GPIO53 (HPS_LED),
// SD Card
.hps_io_hps_io_sdio_inst_CMD (HPS_SD_CMD),
.hps_io_hps_io_sdio_inst_D0 (HPS_SD_DATA[0]),
.hps_io_hps_io_sdio_inst_D1 (HPS_SD_DATA[1]),
.hps_io_hps_io_sdio_inst_CLK (HPS_SD_CLK),
.hps_io_hps_io_sdio_inst_D2 (HPS_SD_DATA[2]),
.hps_io_hps_io_sdio_inst_D3 (HPS_SD_DATA[3]),
// SPI
.hps_io_hps_io_spim1_inst_CLK (HPS_SPIM_CLK),
.hps_io_hps_io_spim1_inst_MOSI (HPS_SPIM_MOSI),
.hps_io_hps_io_spim1_inst_MISO (HPS_SPIM_MISO),
.hps_io_hps_io_spim1_inst_SS0 (HPS_SPIM_SS),
// UART
.hps_io_hps_io_uart0_inst_RX (HPS_UART_RX),
.hps_io_hps_io_uart0_inst_TX (HPS_UART_TX),
// USB
.hps_io_hps_io_gpio_inst_GPIO09 (HPS_CONV_USB_N),
.hps_io_hps_io_usb1_inst_D0 (HPS_USB_DATA[0]),
.hps_io_hps_io_usb1_inst_D1 (HPS_USB_DATA[1]),
.hps_io_hps_io_usb1_inst_D2 (HPS_USB_DATA[2]),
.hps_io_hps_io_usb1_inst_D3 (HPS_USB_DATA[3]),
.hps_io_hps_io_usb1_inst_D4 (HPS_USB_DATA[4]),
.hps_io_hps_io_usb1_inst_D5 (HPS_USB_DATA[5]),
.hps_io_hps_io_usb1_inst_D6 (HPS_USB_DATA[6]),
.hps_io_hps_io_usb1_inst_D7 (HPS_USB_DATA[7]),
.hps_io_hps_io_usb1_inst_CLK (HPS_USB_CLKOUT),
.hps_io_hps_io_usb1_inst_STP (HPS_USB_STP),
.hps_io_hps_io_usb1_inst_DIR (HPS_USB_DIR),
.hps_io_hps_io_usb1_inst_NXT (HPS_USB_NXT),
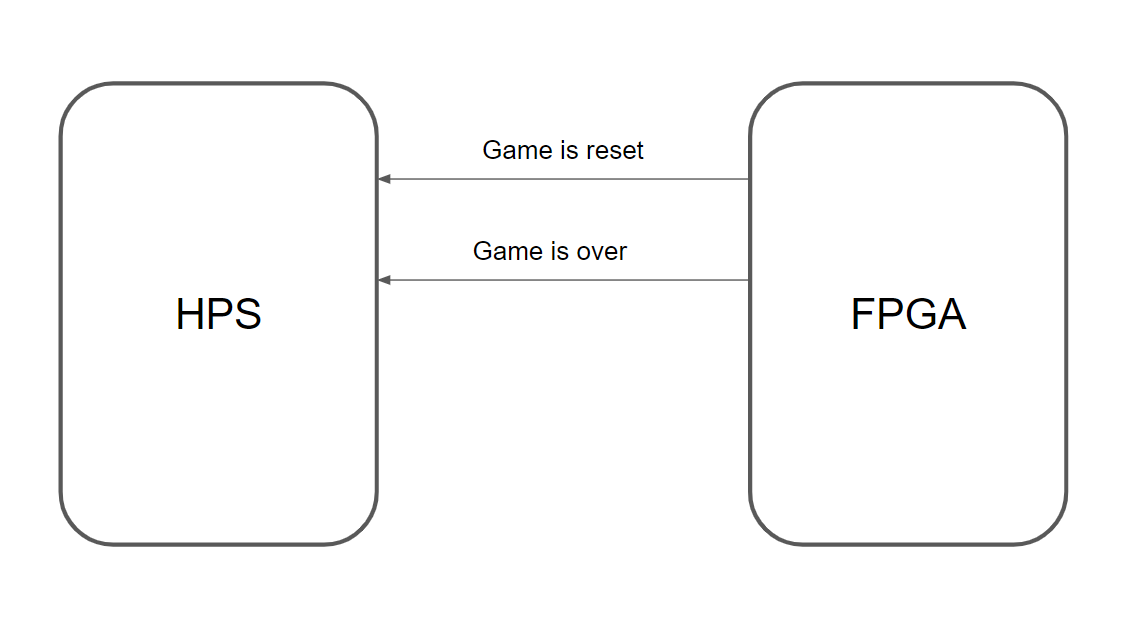
// inputs to ARM from FPGA
.reset_game_export({31'd_0, (~KEY[0] | ~KEY[1])}),
.game_done_export({31'd_0, game_over}),
.score_export(32'd_0)
);
endmodule // end top level
// Declaration of module, include width and signedness of each input/output
module vga_driver (
input wire clock,
input wire reset,
input [7:0] color_in,
output [9:0] next_x,
output [9:0] next_y,
output wire hsync,
output wire vsync,
output [7:0] red,
output [7:0] green,
output [7:0] blue,
output sync,
output clk,
output blank
);
// Horizontal parameters (measured in clock cycles)
parameter [9:0] H_ACTIVE = 10'd_639 ;
parameter [9:0] H_FRONT = 10'd_15 ;
parameter [9:0] H_PULSE = 10'd_95 ;
parameter [9:0] H_BACK = 10'd_47 ;
// Vertical parameters (measured in lines)
parameter [9:0] V_ACTIVE = 10'd_479 ;
parameter [9:0] V_FRONT = 10'd_9 ;
parameter [9:0] V_PULSE = 10'd_1 ;
parameter [9:0] V_BACK = 10'd_32 ;
// // Horizontal parameters (measured in clock cycles)
// parameter [9:0] H_ACTIVE = 10'd_9 ;
// parameter [9:0] H_FRONT = 10'd_4 ;
// parameter [9:0] H_PULSE = 10'd_4 ;
// parameter [9:0] H_BACK = 10'd_4 ;
// parameter [9:0] H_TOTAL = 10'd_799 ;
//
// // Vertical parameters (measured in lines)
// parameter [9:0] V_ACTIVE = 10'd_1 ;
// parameter [9:0] V_FRONT = 10'd_1 ;
// parameter [9:0] V_PULSE = 10'd_1 ;
// parameter [9:0] V_BACK = 10'd_1 ;
// Parameters for readability
parameter LOW = 1'b_0 ;
parameter HIGH = 1'b_1 ;
// States (more readable)
parameter [7:0] H_ACTIVE_STATE = 8'd_0 ;
parameter [7:0] H_FRONT_STATE = 8'd_1 ;
parameter [7:0] H_PULSE_STATE = 8'd_2 ;
parameter [7:0] H_BACK_STATE = 8'd_3 ;
parameter [7:0] V_ACTIVE_STATE = 8'd_0 ;
parameter [7:0] V_FRONT_STATE = 8'd_1 ;
parameter [7:0] V_PULSE_STATE = 8'd_2 ;
parameter [7:0] V_BACK_STATE = 8'd_3 ;
// Clocked registers
reg hysnc_reg ;
reg vsync_reg ;
reg [7:0] red_reg ;
reg [7:0] green_reg ;
reg [7:0] blue_reg ;
reg line_done ;
// Control registers
reg [9:0] h_counter ;
reg [9:0] v_counter ;
reg [7:0] h_state ;
reg [7:0] v_state ;
// State machine
always@(posedge clock) begin
// At reset . . .
if (reset) begin
// Zero the counters
h_counter <= 10'd_0 ;
v_counter <= 10'd_0 ;
// States to ACTIVE
h_state <= H_ACTIVE_STATE ;
v_state <= V_ACTIVE_STATE ;
// Deassert line done
line_done <= LOW ;
end
else begin
//////////////////////////////////////////////////////////////////////////
///////////////////////// HORIZONTAL /////////////////////////////////////
//////////////////////////////////////////////////////////////////////////
if (h_state == H_ACTIVE_STATE) begin
// Iterate horizontal counter, zero at end of ACTIVE mode
h_counter <= (h_counter==H_ACTIVE)?10'd_0:(h_counter + 10'd_1) ;
// Set hsync
hysnc_reg <= HIGH ;
// Deassert line done
line_done <= LOW ;
// State transition
h_state <= (h_counter == H_ACTIVE)?H_FRONT_STATE:H_ACTIVE_STATE ;
end
// Assert done flag, wait here for reset
if (h_state == H_FRONT_STATE) begin
// Iterate horizontal counter, zero at end of H_FRONT mode
h_counter <= (h_counter==H_FRONT)?10'd_0:(h_counter + 10'd_1) ;
// Set hsync
hysnc_reg <= HIGH ;
// State transition
h_state <= (h_counter == H_FRONT)?H_PULSE_STATE:H_FRONT_STATE ;
end
if (h_state == H_PULSE_STATE) begin
// Iterate horizontal counter, zero at end of H_FRONT mode
h_counter <= (h_counter==H_PULSE)?10'd_0:(h_counter + 10'd_1) ;
// Set hsync
hysnc_reg <= LOW ;
// State transition
h_state <= (h_counter == H_PULSE)?H_BACK_STATE:H_PULSE_STATE ;
end
if (h_state == H_BACK_STATE) begin
// Iterate horizontal counter, zero at end of H_FRONT mode
h_counter <= (h_counter==H_BACK)?10'd_0:(h_counter + 10'd_1) ;
// Set hsync
hysnc_reg <= HIGH ;
// State transition
h_state <= (h_counter == H_BACK)?H_ACTIVE_STATE:H_BACK_STATE ;
// Signal line complete at state transition (offset by 1 for synchronous state transition)
line_done <= (h_counter == (H_BACK-1))?HIGH:LOW ;
end
//////////////////////////////////////////////////////////////////////////
///////////////////////// VERTICAL ///////////////////////////////////////
//////////////////////////////////////////////////////////////////////////
if (v_state == V_ACTIVE_STATE) begin
// increment vertical counter at end of line, zero on state transition
v_counter <= (line_done==HIGH)?((v_counter==V_ACTIVE)?10'd_0:(v_counter + 10'd_1)):v_counter ;
// set vsync in active mode
vsync_reg <= HIGH ;
// state transition - only on end of lines
v_state <= (line_done==HIGH)?((v_counter==V_ACTIVE)?V_FRONT_STATE:V_ACTIVE_STATE):V_ACTIVE_STATE ;
end
if (v_state == V_FRONT_STATE) begin
// increment vertical counter at end of line, zero on state transition
v_counter <= (line_done==HIGH)?((v_counter==V_FRONT)?10'd_0:(v_counter + 10'd_1)):v_counter ;
// set vsync in front porch
vsync_reg <= HIGH ;
// state transition
v_state <= (line_done==HIGH)?((v_counter==V_FRONT)?V_PULSE_STATE:V_FRONT_STATE):V_FRONT_STATE ;
end
if (v_state == V_PULSE_STATE) begin
// increment vertical counter at end of line, zero on state transition
v_counter <= (line_done==HIGH)?((v_counter==V_PULSE)?10'd_0:(v_counter + 10'd_1)):v_counter ;
// clear vsync in pulse
vsync_reg <= LOW ;
// state transition
v_state <= (line_done==HIGH)?((v_counter==V_PULSE)?V_BACK_STATE:V_PULSE_STATE):V_PULSE_STATE ;
end
if (v_state == V_BACK_STATE) begin
// increment vertical counter at end of line, zero on state transition
v_counter <= (line_done==HIGH)?((v_counter==V_BACK)?10'd_0:(v_counter + 10'd_1)):v_counter ;
// set vsync in back porch
vsync_reg <= HIGH ;
// state transition
v_state <= (line_done==HIGH)?((v_counter==V_BACK)?V_ACTIVE_STATE:V_BACK_STATE):V_BACK_STATE ;
end
//////////////////////////////////////////////////////////////////////////
//////////////////////////////// COLOR OUT ///////////////////////////////
//////////////////////////////////////////////////////////////////////////
red_reg <= (h_state==H_ACTIVE_STATE)?((v_state==V_ACTIVE_STATE)?{color_in[7:5],5'd_0}:8'd_0):8'd_0 ;
green_reg <= (h_state==H_ACTIVE_STATE)?((v_state==V_ACTIVE_STATE)?{color_in[4:2],5'd_0}:8'd_0):8'd_0 ;
blue_reg <= (h_state==H_ACTIVE_STATE)?((v_state==V_ACTIVE_STATE)?{color_in[1:0],6'd_0}:8'd_0):8'd_0 ;
end
end
// Assign output values
assign hsync = hysnc_reg ;
assign vsync = vsync_reg ;
assign red = red_reg ;
assign green = green_reg ;
assign blue = blue_reg ;
assign clk = clock ;
assign sync = 1'b_0 ;
assign blank = hysnc_reg & vsync_reg ;
// The x/y coordinates that should be available on the NEXT cycle
assign next_x = (h_state==H_ACTIVE_STATE)?h_counter:10'd_0 ;
assign next_y = (v_state==V_ACTIVE_STATE)?v_counter:10'd_0 ;
endmodule
//============================================================
// M10K module for testing
//============================================================
// See example 12-16 in
// http://people.ece.cornell.edu/land/courses/ece5760/DE1_SOC/HDL_style_qts_qii51007.pdf
//============================================================
module M10K_1000_8 (
input [7:0] data_a, data_b,
input [18:0] addr_a, addr_b,
input we_a, we_b, clk,
output reg [7:0] q_a, q_b
);
// Declare the RAM variable
reg [7:0] ram[307200:0]; /* synthesis ramstyle = "no_rw_check, M10K" */
// Port A
always @ (posedge clk)
begin
if (we_a)
begin
ram[addr_a] = data_a;
end
q_a <= ram[addr_a];
end
// Port B
always @ (posedge clk)
begin
if (we_b)
begin
ram[addr_b] = data_b;
end
q_b <= ram[addr_b];
end
endmodule
module signed_mult (out, a, b);
output signed [28:0] out;
input signed [28:0] a;
input signed [19:0] b;
// intermediate full bit length
wire signed [48:0] mult_out;
assign mult_out = a * b;
// select bits for 2.27 fixed point
assign out = {mult_out[48], mult_out[37:10]};
endmodule
module calc_vel (out, a, b);
output signed [19:0] out;
input signed [19:0] a;
input signed [10:0] b;
// intermediate full bit length
wire signed [29:0] mult_out;
assign mult_out = a * b;
// select bits for 2.27 fixed point
assign out = {mult_out[29], mult_out[18:0]};
endmodule
//used when drawing circle
module circle_signed_mult (out, a, b);
output signed [9:0] out;
input signed [9:0] a;
input signed [9:0] b;
// intermediate full bit length
wire signed [19:0] mult_out;
assign mult_out = a * b;
// select bits for 2.27 fixed point
assign out = {mult_out[19], mult_out[8:0]};
endmodule