Conclusion
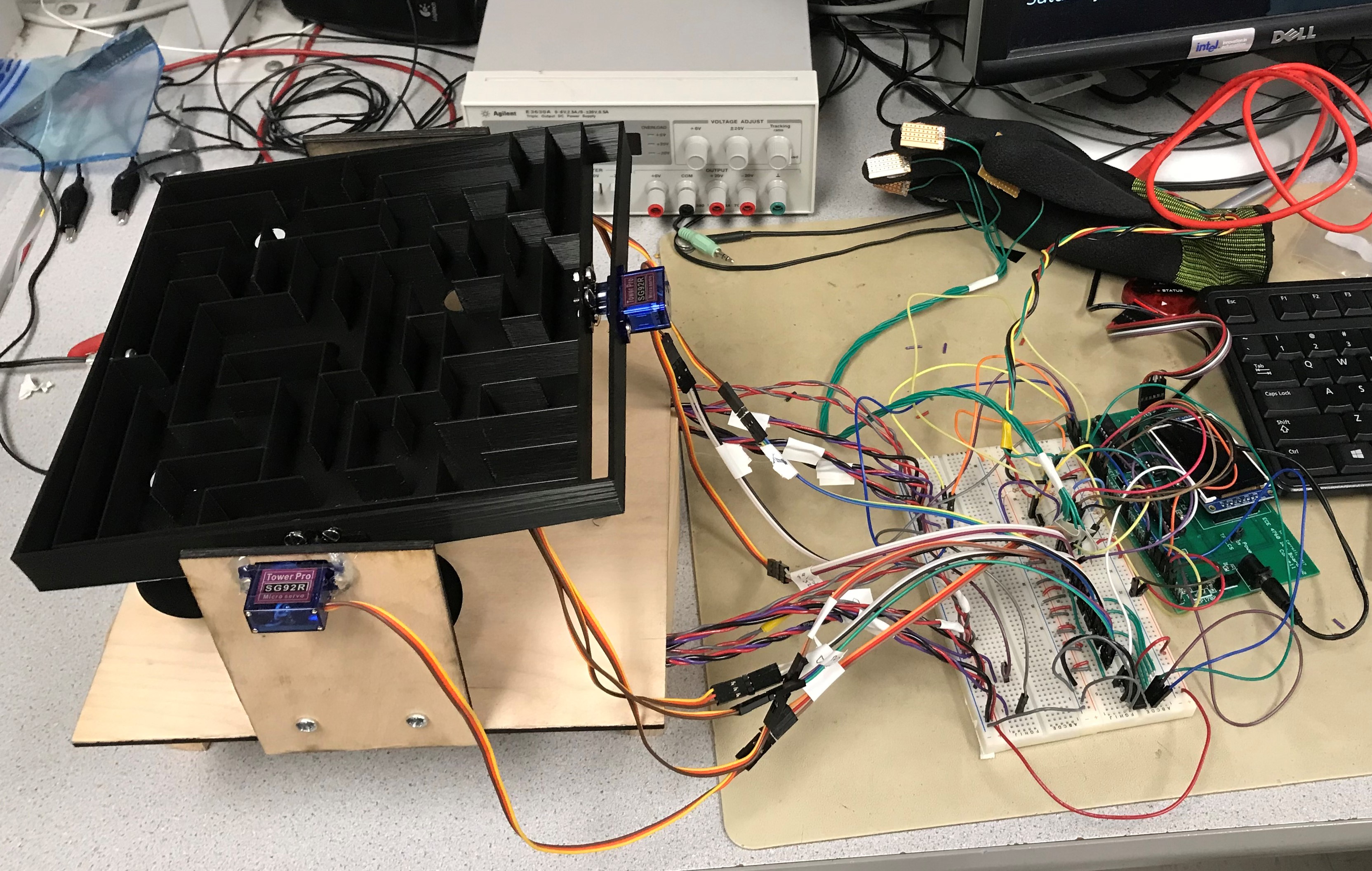
The design of our final product deviated slightly from what we had originally envisioned, but contained all of the elements that we had hoped to include. One major obstacle we encountered was incorporating the IR sensors into our design. We had originally planned to attach them directly to the bottom of the maze, but soon realized that we would not be able to manage the large quantity of wires in a way that would not inhibit the playability of the game. Therefore, we instead decided to elevate the maze platform and drill 5 holes in it, then place funnels over each of these holes to catch the ball when it fell through the maze. This allowed us to place the IR detection circuits underneath the platform, which gave us much more room to work with and also did not interfere with the gameplay. However, this detection strategy is not as accurate because there is a chance that the ball will not fall into the correct funnel or miss altogether, especially for the holes near the edges of the maze because the tilting causes it to cover a greater horizontal area. Therefore, if we were to improve our design, we would make the diameter of the funnels for the outer holes larger to decrease the probability of the ball missing.
Next time, we would try to think through our design more carefully at the start in order to avoid running into such design issues at the end. However, aside from this we were quite happy with the outcome, as we accomplished everything we had planned to.
It is worth noting that although the vast majority of the work was developed by us, not everything in the project is our work. Specifically, regarding intellectual property, the layout of the maze was based off of this image which we have permission to use as long as we add in this attribution: Lines Vectors by Vecteezy. Additionally, we used parts of the I2C MPU-6050 accelerometer code from this previous ECE 4760 project: 3DOF Stewart Platform. We did not reverse-engineer any patented/trademarked designs or sign a non-disclosure to get a sample part. We could patent or publish the project, but we prefer to keep it Open-Source in case anyone else would like to use it.
Regarding safety, we strived to make the device as safe as possible to use, and for the most part there isn't anything that could cause injury. The closest thing that we found that could possibly be considered a hazard is the 3.3V plate on the thumb of the glove, which may be a minor shock hazard. To address this, we made sure to choose a glove that had a thick rubberized coating to completely insulate the user from the possibility of shocks. This complete electrical isolation means that FDA requirements for attaching wires to oneself do not apply.
Throughout this project, we made sure that the actions and decisions that we made were consistent with the IEEE Code of Ethics. Regarding I., for example, we made sure that our project was as safe as possible, and we took steps to remedy issues that may potentially cause harm. We also made sure to follow high standards of integrity and responsible behavior by being honest with each other, and offering and accepting constructive criticism and feedback on our work. Regarding II. we absolutely treated everyone on our team with respect and did not discriminate or harm each other. Regarding III. we all made sure we supported each other in making ethical and responsible actions.