This webpage describes the development of a Stabilized Gimbal Control System for the CUAir team, Cornell University's Unmanned Air Systems Team. The Stabilized Gimbal Control System will help the CUAir team compete at the Association for Unmanned Vehicle System International (AUVSI) Student Unmanned Air Systems (SUAS) Competition. The system developed will help the team accomplish the off-axis target imaging task, accomplish the egg-drop task, and improve the task of imaging targets below the aircraft.
This project consisted of the design and construction of a Gimbal Control Board, and the development of the software that executes both on the micro-controller and on the aircraft's payload computer. This project did not consist of building the physical gimbal that the Gimbal Control Board will actuate. The Gimbal Control Board contains an onboard 6-Axis Inertial Measurement Unit (IMU), headers for a GPS module, 5 servo connections with optical isolation, voltage regulation, and an Atmega128 micro-controller. The software developed provides a high performance asynchronous serial communication library, software to read and parse data from the GPS and IMU, software to control the servo signal lines that command the servo to actuate to certain angles, software to stabilize the gimbal system's pointing angle, and software to point the gimbal at a specified GPS position.
This webpage contains the high level details for the design, development, and evaluation of the Stabilized Gimbal System. A more detailed report of the design and development can be downloaded here.
Video demonstration of the Stabilized Gimbal System.
The ECE 4760 Project Demonstration for the Stabilized Gimbal System.
High Level Design
This section describes the high level design of the Stabilized Gimbal System. This includes the motivation for the project, the background math, the hardware and software tradeoffs, existing designs, and relevant standards and regulations.
Project Motivation
This section describes the motivation for the Stabilized Gimbal System Project. The first subsection describes the Association for Unmanned Vehicle System International (AUVSI) Student Unmanned Air Systems (SUAS) Competition. The second subsection describes the CUAir Project Team, an engineering team at Cornell University that competes in the AUVSI SUAS Competition. The Stabilized Gimbal System described in this document was developed for the CUAir team. The final subsection describes the motivation for the Stabilized Gimbal System, and how it relates to the AUVSI SUAS Competition and the CUAir team.
Association for Unmanned Vehicle Systems International (AUVSI) Student Unmanned Air Systems (SUAS) Competition
The AUVSI SUAS Competition is an annual competition in June that takes place at the Webster Field Annex of the Patuxent River Naval Base. The competition focuses on building unmanned air systems that can complete reconnaissance missions with real-world constraints. College teams from around the world attend this competition. Last year over 40 teams registered to compete, about 35 teams attended the competition, and about 32 teams flew their aircraft at competition.
Competition Components. The competition is broken into three components: the technical journal paper, the flight readiness review presentation, and the simulated mission. The components are worth 25%, 25%, and 50% respectively. The journal paper is a 20 page paper that focuses on the design and testing of the air system. The flight readiness review presentation focuses on why the team is confident the air system will perform a safe and successful mission. The simulated mission is a sample mission where students are given mission parameters and expected to perform the mission within the given time-frame and mission parameters.
The Simulated Mission. The simulated mission is broken into eight sections: mission setup, takeoff, waypoint navigation, search grid, emergent target, Simulated Remote Intelligence Center (SRIC), landing, and cleanup. Mission setup involves transporting the competition gear to a designated site within 5 minutes, unpacking and settings up the gear within 15 minutes, and then beginning the mission. Teams are not allowed to turn on aircraft components or wireless gear during this setup phase. After the 15 minutes of setup the mission starts, which means students have 30 minutes to complete all simulated mission components. The first component is autonomous takeoff, which is usually attempted once ground checks have been completed. The second component is waypoint navigation, where the aircraft must follow a specified flight path within a certain tolerance. The third component is the search grid, which is an area of abnormal shape which may contain targets of interest. The air system must stay within the search grid at all times, and must enter and leave the grid at a specified location. The judges will at some point indicate the location of an emergent target, which is a target of interest with an approximate location. Teams are required to dynamically re-route to this location. The teams then attempt the SRIC task, which involves downloading information from a remote WIFI network and relaying this information back to the ground system. Finally, the air system lands and data is given to the judges. The air system is tasked with identifying and classifying targets of interests that are located within the mission area during the course of aforementioned flight operations. Teams are judged based on targeting performance and level of system autonomy. Once the mission is complete, teams have 15 minutes to cleanup the area and leave the mission site.

CUAir at the 2013 AUVSI SUAS Competition |

2013 AUVSI SUAS Competition: CUAir at the Flight Readiness Review |
|
2013 AUVSI SUAS Competition: CUAir preparing for transport to the Mission Site |

2013 AUVSI SUAS Competition: CUAir settings up for the simulated mission |

2013 AUVSI SUAS Competition: Hyperion (CUAir's Aircraft) preparing for takeoff |

2013 AUVSI SUAS Competition: Hyperion Flying the Waypoint Navigation Section |
Ground Focused Imaging. A core focus of the competition is the ability for the air system to take pictures of the ground and identify targets of interest. The air systems must achieve good imagery ground coverage as the target identities and locations are not known to the teams beforehand. Most teams bring fixed-wing aircraft to the competition due to their better performance in long range flight, stabilized flight in wind, and flight with heavy payload components. These aircraft change attitude by actuating flight surfaces to roll or pitch the aircraft. When the aircraft changes attitude, the payload also changes attitude. This means that cameras that point at the ground to take images are no longer pointed at the ground when the aircraft changes attitude from a level position. The aircraft changes attitude during turns, and in response to wind that moves the aircraft off desired flight-path. This means that during these events the air system does not take pictures of the ground, which could cause the system to miss targets entirely and hurt mission performance. A stabilized gimbal system can actuate the camera in response to these attitude changes to keep the camera focused on the ground where targets are located.
Off-Axis Target Imaging. During the waypoint navigation phase of the simulated mission the air system is required to image a target with known location that does not appear directly below the air system's flight path. That is, a camera system which only points directly down cannot image this off-axis target. There are two ways to solve this problem: use multiple cameras that are fixed so as to cover any off-axis target, roll the aircraft to align the camera with the target, or use a stabilized gimbal system that can point at the known GPS location as the aircraft is passing the target. Multiple cameras are usually prohibitive due to size, weight, and cost. Rolling the aircraft will cause it to deviate from the required flight-path and may cause the aircraft to exceed the path tolerance. Thus, a stabilized gimbal system is best for a fixed-wing aircraft to image this required off-axis target.
New Competition Components. The 2014 AUVSI SUAS Competition have a few new components than previous years. The two major components are infrared imaging and egg drop. The infrared imaging task is to identify a target of interest that requires an infrared camera to be seen. Infrared cameras are significantly more expensive at higher resolutions, which will require teams to purchase lower cost cameras that have the ability to zoom. Cameras that zoom require a gimbal system to be effective as the probability of a target appearing perfectly below the flight path is very small. The egg drop task is to drop a plastic egg with flour inside to hit a known target. There are many ways to accomplish this task, but most require the actuation and positioning components that are inherent to a stabilized gimbal system.

2013 AUVSI SUAS Competition: Targets that were placed in the mission area |

Image taken from Hyperion during a test flight |

Target Found in the Image Taken by Hyperion |

Target Found in the Image Taken by Hyperion |
CUAir: Cornell University Unmanned Air Systems Team
CUAir is Cornell University's Unmanned Air Systems Engineering Project Team. The team consists of about 40 undergraduate students, up to 1 graduate student, and a faculty advisor. The faculty advisor for the team is Professor Thomas Avedisian of Cornell University's MAE School. The team is structured into five subteams: airframe, autopilot, software, electrical, and business. There is a team lead that manages the entire team, and five subteam leads that manage their respective subteam. Phillip Tischler is a member of the CUAir team. From 2012-2013 he was the full team lead, from 2011-2012 he was the software subteam lead, and 2010-2011 was his first year on the team. Phillip Tischler is the single graduate student for the 2013-2014 year.
Team History and Goals. CUAir, Cornell University Unmanned Air Systems, is an interdisciplinary project team working to design, build, and test an autonomous unmanned aircraft system capable of autonomous takeoff and landing, waypoint navigation, and reconnaissance. Some of the team's research topics include airframe design and manufacture, propulsion systems, wireless communication, image processing, target recognition, and autopilot control systems. The team aims to provide students from all majors at Cornell with an opportunity to learn about unmanned air systems in a hands-on setting. The team was founded in 2002. In 2012 the team placed 2nd Overall, and 1st in Mission Performance. In 2013 the team placed 1st Overall, 1st in Mission Performance, and 1st in Technical Journal Paper. The team hopes to continue this success in the 2014 competition.
Overall System Design. The image below shows the design of CUAir's full system. It is quite complicated and out of scope for this document. From this figure you can see that there is a message passing layer that can carry data and command messages from various nodes in the system. The aircraft node is the software process located on the aircraft's payload computer that controls all payload components. This software node can communicate with any onboard gimbal control systems and be a middle-man for any data or command messages that come from the ground system. Any gimbal control system simply needs to be integrated into the aircraft node, and then the gimbal is fully integrated into the rest of the system.
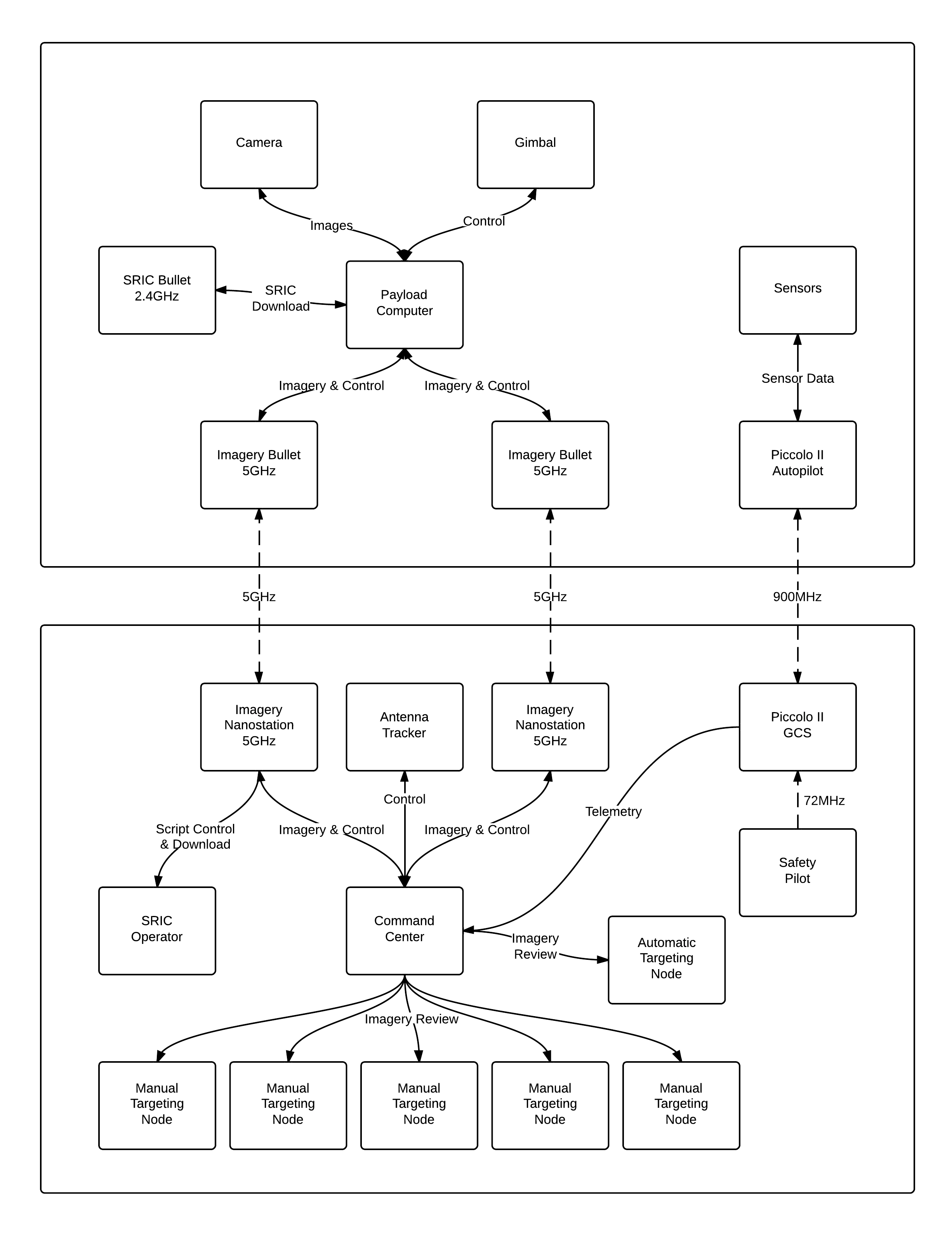
CUAir's Overall System Design. The top portion of the diagram shows system components that are located in the aircraft. The bottom portion of the diagram shows system components that are located in the ground station. As shown, the gimbal control system is controlled by the payload computer which executes the aircraft node software process.
Stabilized Gimbal System
A Stabilized Gimbal System would greatly improve the mission performance of CUAir's air system at the AUVSI SUAS Competition. Such a system would increase the amount of imagery ground coverage by focusing the camera system on the ground during attitude corrections that roll and pitch the aircraft. Such a system would also allow the air system to image off-axis targets reliably. Commercial systems are not a viable option for the CUAir team. The commercial systems the team investigated indicated that such systems were either lacked performance, were prohibitively expensive, or did not allow the required system integration the team would need. As such, the team decided it is best to build a custom Stabilized Gimbal System.
CUAir previously attempted to build a Stabilized Gimbal System, but that effort was mostly unsuccessful. However, the lessons learned during that effort guided this new system to success. Previously, the mechanical system relied on gears that allowed the gimbal to move in between commanded set points. This greatly decreased the accuracy and reliability of the camera actuation. The new gimbal system developed uses mechanical arms that remove this "slop" in the gimbal mechanism. Second, the gimbal suffered from twitching servos due to a noisy power supply as well as signal corruption. Signal corruption was caused when the servos produced back-emf on the same line as the pulse signal controlling the servo's position. The new gimbal system uses linear voltage regulators to smooth the power supply, and optical isolation chips to prevent signal corruption. Third, the accelerometer and gyroscope chips used to calculate the gimbal's state suffered from axis misalignment and mis-calibration. The new gimbal system has a single chip with internal axis alignment, factory-calibrated axis alignment, and internal calibration. Finally, the communication interface was previously selected to be Ethernet, a choice which drastically complicated the project and caused the gimbal control boards to take up much more space. The new gimbal system uses regular serial communication with a USB connection.
This project will provide CUAir with a gimbal system that can actuate a camera accurately and reliably, communicate with a host computer to convey state information and receive command settings, to calculate its state from on-board sensors, to stabilize the camera system so as to keep it pointed at the ground, and finally to point the camera system at a known GPS location. Such a system will help CUAir excel at the 2014 AUVSI SUAS Competition.
Background Math
This section explains the prerequisite math necessary to understand the rest of the design and development. The two largest components explained in this section are Q Number Format and Quaternions.
Q Number Format
Micro-controllers do not have floating point hardware. Floating point math is simulated by the micro-controller using integer math. The result is that floating point operations take 100 to 300 cycles to complete. Many floating point operations can slow down the micro-controller drastically. The Stabilized Gimbal System needs to perform many calculations, must store various forms of data, and must be able to serialize that data. Q Notation math can provide 2 to 4 times speedup compared to floating point math. It also makes serialization the task of serializing an integer, not a floating point number.
Consider the math required to convert a quaternion to euler angles. There are 15 multiplications, 4 additions, 3 subtractions, and 3 trigonometry calculations. Lets assume that each arithmetic operation takes 200 cycles and each trigonometry calculation uses about 1000 cycles. This means each calculation requires 22*200 + 3 * 1000 = 7400 cycles needed per calculation. This calculation is done at 200Hz, which means it takes up about 1.48MHz of the processor. In reality the calculation will not be perfectly efficient and more cycles will be used that this lower bound. Approximately 1/8 of the micro-controller's CPU will get used to simply convert the representation of rotation. Q number format can cause the same calculation to only take 1/32 of the CPU.
Q Number format represents a decimal number as an integer number and a fractional numerator. The Q number is usually expressed as Qm.n where m is the number of bits used for the integer number and n is the number of bits used for the fractional numerator. The integer number occupies the highest m bits of the number and the fractional numerator occupies the lower n bits of the number. Lets say the value of the m bits is a and the value of the n bits is b, then the value of the number is a + (b/(2^n)) and the number is represented in memory as ((a << n) | b). Converting a floating point number to Q number format means multiplying by the number by 2^n and rounding the value to the nearest integer. Converting from Q number format to floating point means converting the integer value to a floating point value and multiplying by 2^-n. The value of n is chosen prior to execution, so the values of 2^n and 2^-n can be computed and stored prior to execution.
The numbers are represented as fractions, so additions and subtractions are equivalent in the Q number format. For multiplications and divisions, the answer must be multiplied or divided by the denominator respectively. This can be accomplished by left shifting or right shifting respectively.
It should be noted that Q number format requires the user to select values of m and n prior to writing the code. Typically the values of m and n are chosen based on the domain of the problem being computed. If too small of values are chosen for m or n then the computation can suffer from overflow or lack of precision. If too large of values are chosen then the Q number format calculations will run slower than desired.
Quaternion Math
A quaternion is another way to represent a rotation. A unit quaternion with rotation around axis v by angle theta can be seen as:

|
Rotation around axis v by angle theta |
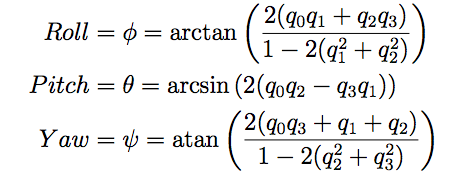
The quaternion representation is useful for operations with rotations. A quaternion can be converted to Euler angles with the following formula:
|
Conversion from Quaternion to Euler Angle |
Overall System Design
The image below shows an overview of the Stabilized Gimbal System that was developed and will be integrated into the CUAir system. The diagram is broken into four sections: the Gimbal Control System, the Physical Gimbal, the Payload Computer, and the Personal Laptop. The Gimbal Control system consists of a printed circuit board (PCB) that contains a 6 Axis MEMS device, a GPS header which connects to a GPS device, a FTDI chip which converts serial to the USB connection, and the micro-controller. Each individual component is discussed in greater detail in later sections. The MEMS device and the GPS continuously relay state to the micro-controller. The micro-controller then estimates its state, computes the required actuation amount to achieve a desired functionality based on the current state, and then outputs the pulse signal to actuate the servos. The micro-controller then sends its state from the Gimbal Control System to the Payload Computer via the USB connection.
The Payload Computer receives the state information from the USB connection and can use that connection to send commands. Example commands include to point at a specific GPS position, to stabilize to a relative attitude, or to set specific servo angles. The communication interface, state messages, and command messages are packaged into a C++ software library that was developed as part of this project. This makes integration extremely easy. The existing aircraft node software process uses the Stabilized Gimbal Control System Library to receive the state information and send command settings. The aircraft node acts as a middle-man between the Stabilized Gimbal System and either the ground station or other autonomy software. To demonstrate the ease of integration, the team built a test client GUI application which shows the data received through the software library and allows the user to send command messages.

Stabilized Gimbal System Block Diagram Overview
Hardware and Software Tradeoffs
There were three hardware tradeoffs that were made. First, the Atmega series of micro-controllers do not come with Direct Memory Access (DMA) communication support. This means the micro-controller must waste CPU cycles shifting bytes from memory to the hardware communication component. That is, each byte requires an interrupt to transfer a byte from a data buffer to the transmission register. Direct Memory Access would allow the micro-controller to indicate which location in memory contains the data to send, and then the hardware will automatically pull the data from memory. This is much more efficient. The Atmega series was chosen because the ECE 4760 course is based on the series. This helped guarantee the project didn't fail due to misunderstanding the differences between the two architectures.
The second hardware tradeoff was the selection of the Inertial Measurement Unit (IMU). The IMU selected improves the axis alignment of the chip and provides internal state estimation. These features made the chip simpler to use, but the chip itself may not be the best chip for the job.
The third hardware tradeoff was the choice to use servos instead of brushless motors. Brushless motors provide a smoother actuation that can yield better stabilization. However, they come at a cost of system complexity and system cost. The team decided it would be best to get a reliable working system before going for complicated stabilized brushless motor control.
No known software tradeoffs were made during the design and development of the Stabilized GImbal System.
Existing Designs
There are copyrights on the software libraries used during the development of the system. However, those copyrights do not impact the development as it is not a commerically developed system, but merely a project for an academic course. There are no known patents, copyrights, or trademarks which are relevant to consider.
There are many types of gimbal systems that could be used for an autonomous reconnaissance aircraft, but only two are usually used. The first is a pan-tilt gimbal which is best used when a human operator has to view a video feed and manually control a gimbal to visualize a target. However, this is not the use case that CUAir is concerned with. CUAir's system needs optimal stabilization but does not care about orientation because algorithms process the imagery. Thus, CUAir requires a roll-pitch gimbal system.
Some existing designs use brushless motors. These motors have a smaller dead-band than that of servos and their power output can be directly controlled. This yields a more accurate and smoother stabilization. Many commercial systems will use this type of stabilization. However, as previously mentioned servos were chosen to save on complexity and cost.
The main benefit this custom Stabilized Gimbal Control System has over existing designs is the combination of cost, flexibility, and openness. The cost of this Stabilized Gimbal is significantly less than most commerical systems. Developing the system in-house will allow the team to expand upon it to add custom functionality that will add competitive advantage. For these reasons, developing the custom system was preferred.
Relevant Standards and Regulations
There are no known relevant standards or regulations regarding this design of the Stabilized Gimbal System.
Hardware Design
This section describes the design of the hardware for the Stabilized Gimbal System. The first section describes the design of the physical gimbal that the control system was designed to actuate. The second section describes the design of the Stabilized Gimbal Control Board, which contains all of the hardware work performed by the members of the project.
Optical Isolated Servo Connections. Electric motors and servos are usually controlled by an input line, a line which is frequently controlled by a micro-controller. For the Stabilized Gimbal System, the Atmega128 micro-controller is used to control up to 5 servos. When a load is applied to a motor or servo it produces an back electromagnetic force (emf) which can corrupt a control signal. The solution is to electrically isolate the control signal from the line that contains the back emf. This is accomplished using optical isolation. An optical isolation chip works like a transistor. Electricity flowing through one side of the isolator will create a light beam that activates a photodiode which turns on a transistor. Essentially, current through one side of the isolator allows current through the other side to flow, without the need for the two sides to be electrically coupled in any way.
Global Positioning Unit. The GPS unit provides the Stabilized Gimbal Controller the ability to sense its absolute position on earth. This is necessary for the point at GPS functionality. That is, the control system needs to know its position to know the relative pointing angle to command so that the camera points at the desired GPS position. The GPS also provides an absolute clock which can be used to synchronize time between components. The GPS unit chosen was selected because of its wide use in open source autopilots, other CUAir members previously researched GPS units and figured out it is a high quality device, and subsequently the CUAir team already owns the unit. The GPS unit gives position (latitude, longitude, absolute altitude (msl), relative altitude (agl)) at 1Hz and can be configured to run at up to 10Hz. It also gives velocity which can be used to extrapolate where the plane is going and point the gimbal between GPS updates.
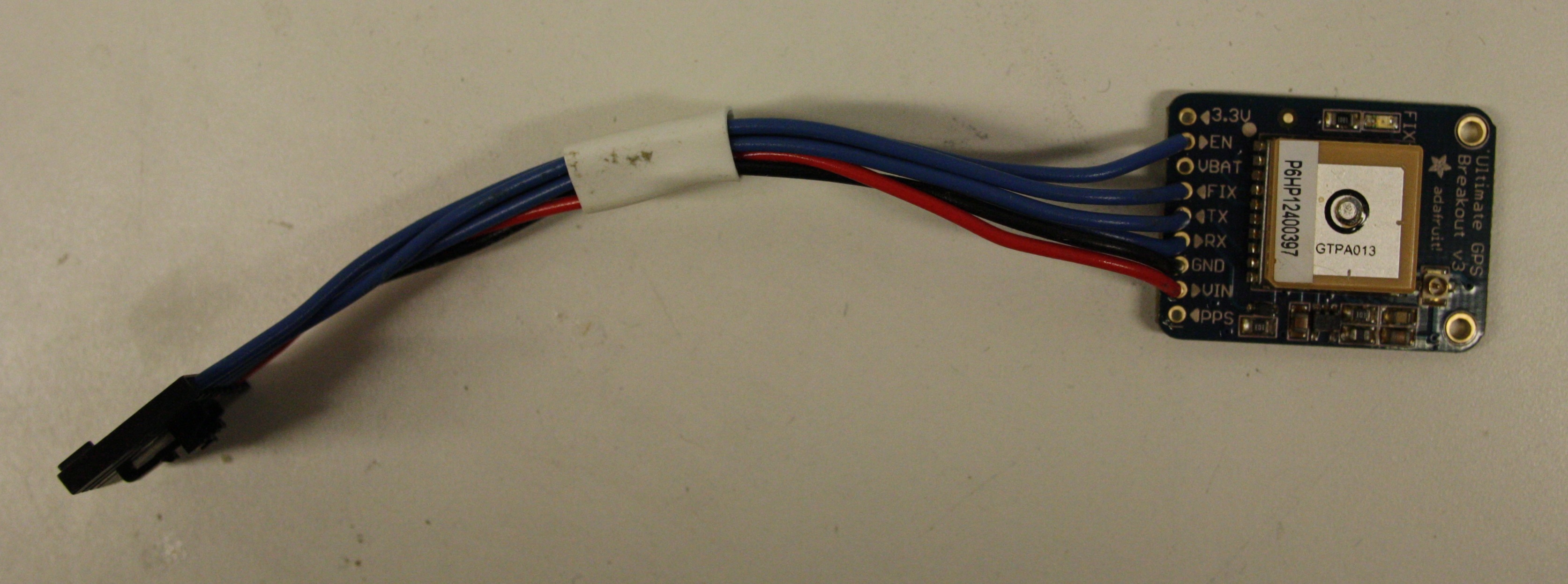
|
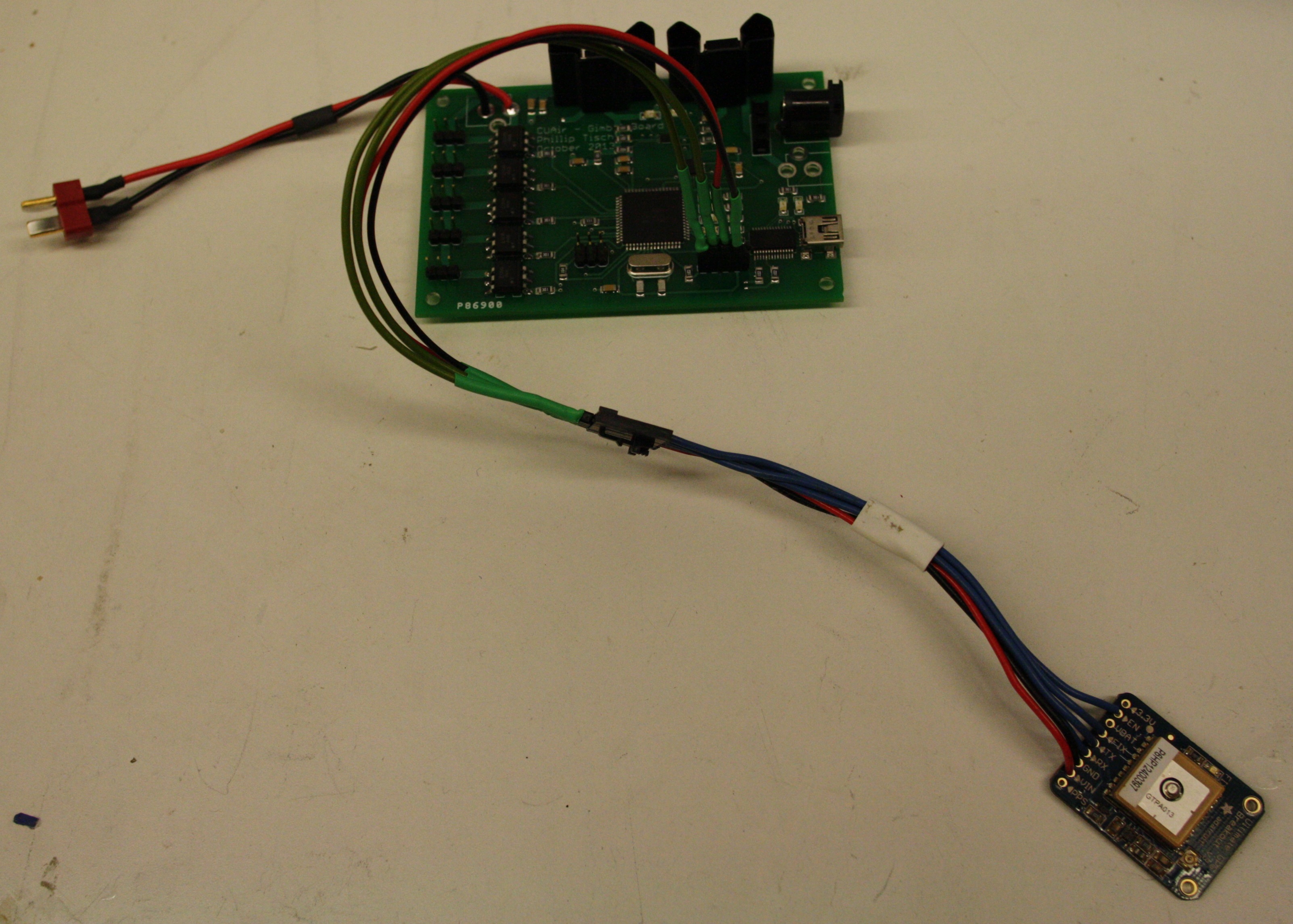
|
Inertial Measurement Unit
The MPU-6000 is a 6 Axis IMU which consists of a 3 axis accelerometer and 3 axis gyroscope. The IMU also has a Digital Motion Processor (DMP) which can provide a state estimate as a quaternion at rates up to 200Hz. A quaternion is a 4 dimensional vector where one dimension represents the cosine of half the angle, and the other three dimensions represent the vector axis of rotation times the sine of half the angle. This is discussed in more detail in later sections. The unit was selected because it provides on chip axis alignment of the accelerometer and gyroscope, superior factory and internal calibration relative to separate chips, availability and popularity, and because of the DMP. The DMP provides a state estimate which could potentially save the Micro-controller from having to compute the state itself. The downside to the MPU-6000 is that the chip is extremely small which makes handling difficult, the chip is lead-less which makes board assembly extremely difficult and error prone, the chip interfaces through I2C which makes receiving data slightly more difficult, the chip runs on a 3.3V power supply and logic signal which requires extra components, and the software to interface with the chip is very closed-source. All of the potential downsides to the chip were resolved during the course of the project, except for the closed-source nature of the DMP. The DMP is completely closed-source and it is still quite difficult to interface with or debug.
Logic Level Convertor
The logic level converter is used to translate a 5V I2C signal to a 3.3V I2C signal. The Atmega128 micro-controller operates at 5V and outputs a 5V I2C signal. The MPU-6000 IMU chip operates at 3.3V and outputs a 3.3V I2C signal. This difference prevents communication between the two devices. The logic level converter connects to the 5V and 3.3V signal lines to convert the voltage levels. This creates a communication channel between any 5V and 3.3V devices connected to the two I2C lines. It is by far the smallest component that is on the board, and is the second hardest to solder. When building another board, it should be noted that there are multiple manufacturers that make this chip, each with the same name but with different pin-outs. This lead to an early mistake where a TI chip was purchased instead of the NXP chip. This caused the component to start smoking on the board. Once replaced with the proper chip everything worked perfectly.
FTDI and USB Connection
The Gimbal Control Board needs to communicate with the payload computer on the aircraft in order to relay state information and accept commands. There are two possible interfaces: Ethernet and USB. Ethernet simplifies development from the payload computer software side, but it drastically increases the complexity of the Gimbal Control Board hardware and software. USB is a much easier interface to implement and can achieve the required communication speeds. The FTDI chip converts the serial that is transmitted and received from the micro-controller into the USB interface needed to communicate with a host computer. This chip requires the host computer to install the FTDI driver which makes the USB connection appear as a serial communication interface.
Atmega128 Micro-controller
The Atmega128 micro-controller was selected because of the number of timers, PWM output lines, and serial communication interfaces it has. The Gimbal Control Board needs to control 5 servos, receive data from a GPS, and communicate with the payload computer. It was also desired to have a smaller surface mount chip that would make the entire footprint of the Gimbal Control Board smaller. This is important for a device that is mounted into a small autonomous aircraft. The choice of the Atmega128 did have one downside, the amount of available data memory. The MPU-6000 needs to be loaded with its firmware upon startup, which needs to be stored on the Atmega128 and sent via I2C. The code to control the chip and the firmware for the MPU-6000 is bigger than the data memory available on the chip. This required the firmware to be stored in program memory and for the MPU-6000's software library to be modified to load from program memory. This is discussed in more detail in later sections.
Voltage Regulation
Voltage regulation drops a higher voltage and noisy input signal into a specific voltage with low noise. There are two types of voltage regulation: switching and linear. Switching regulation is much more efficient than linear, but it introduces a ripple into the output line which increases the noise. Certain components can deal with this noise which makes switching regulation ideal. However, previous designs for the Stabilized Gimbal System indicate that the gimbal is not one of those components. Linear regulation is less efficient and generates more heat, but it provides a lower noise output signal. The Gimbal Control Board uses two linear regulators: one to provide a 5V power line and another to provide a 3.3V power line. The 5V line powers almost all components except the IMU and the Logic Level Converter which are powered by the 3.3V line. The regulators were chosen to easily cover the power requirement so as to minimize heat generated. The aircraft payload compartment is mostly sealed and does not necessarily get great airflow. Good heat dissipation is important for such an environment, which is why powerful regulators were used with heat sinks.
Printed Circuit Board Design and Re-flow Soldering Assembly
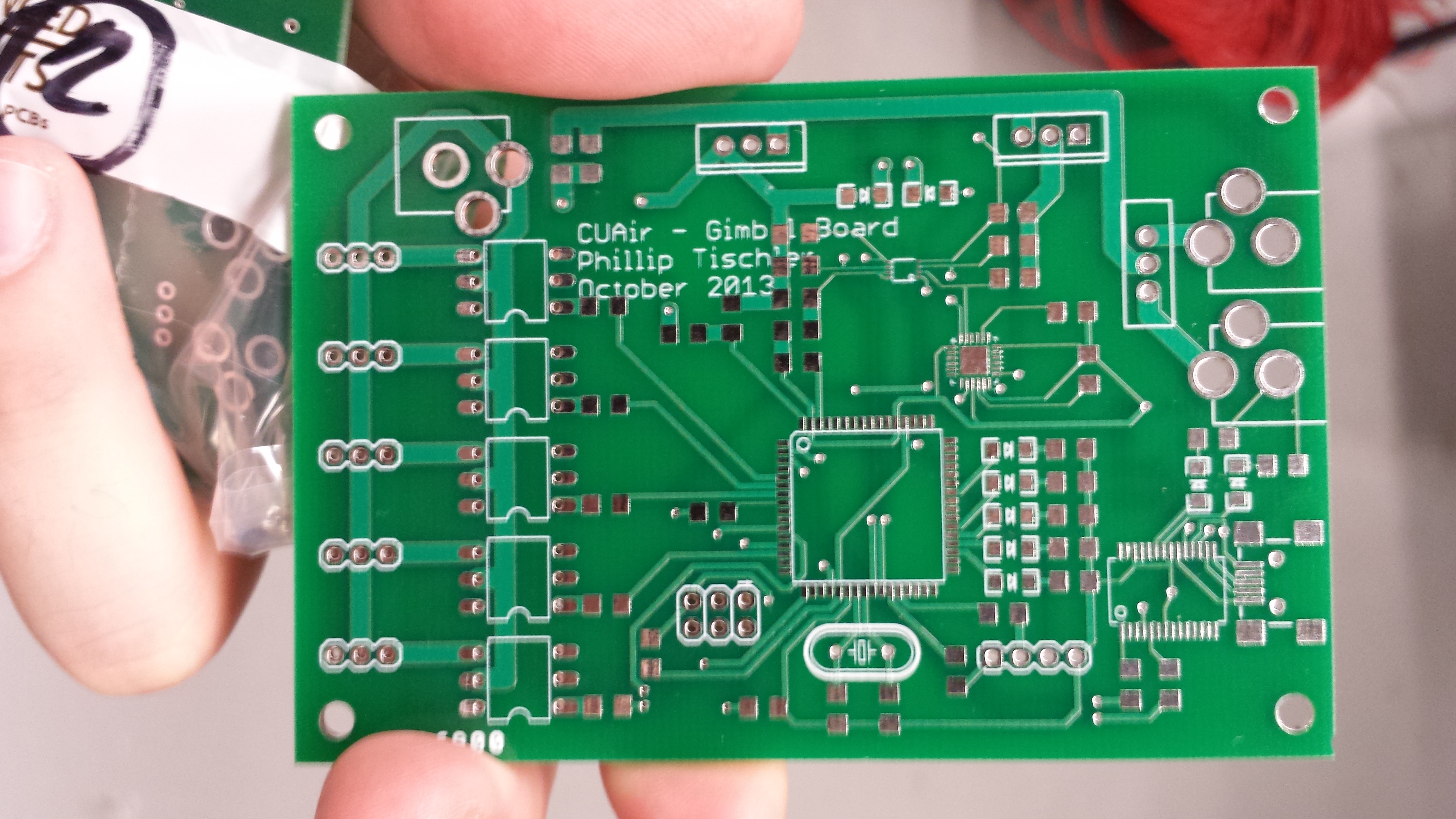
The printed circuit board (PCB) was designed using Eagle CAD and then sent to Advanced Circuits to be manufactured. This was done early enough in the semester so that the boards were manufactured in time to start the software. Phillip Tischler, who designed the boards, did not know how to design or manufacture PCBs prior to this project and learned in the beginning of the semester. Figure \ref{fig:pcb-schematic} shows the PCB schematic that was designed. Figure \ref{fig:pcb-layout} shows the PCB layout that was sent to be manufactured. Figure \ref{fig:pre-solder} shows what the boards looked like when they arrived, before they were soldered.
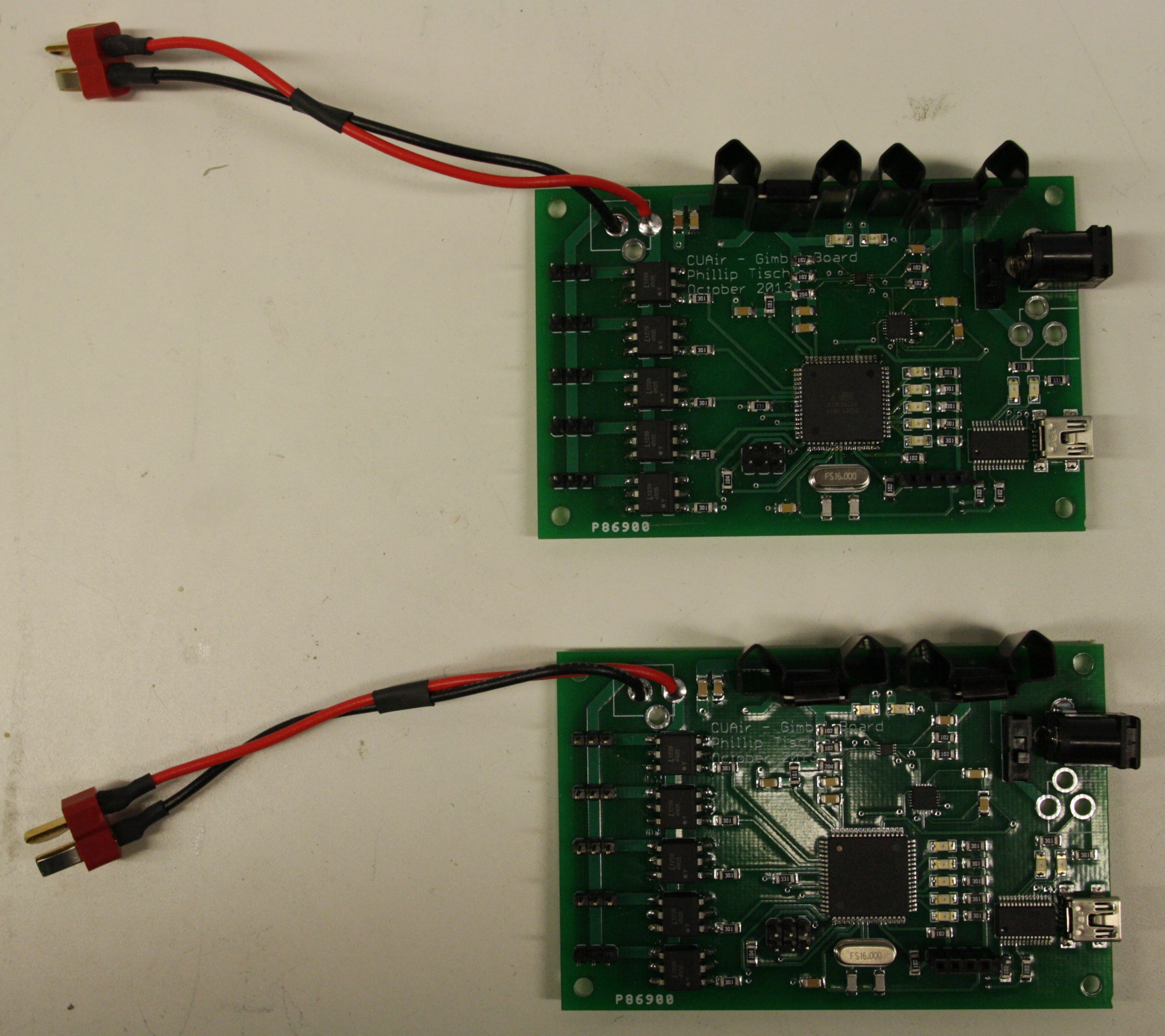
Most of the components on the Gimbal Control Board are surface mount. The logic level converter is so small it is practically impossible to solder by hand. The MPU-6000 IMU is lead-less and thus impossible to solder by hand. The team used re-flow soldering to assemble most of the board. Phillip Tischler did not know re-flow soldering prior to the start of the project. The team first purchased re-flow tutorials on Sparkfun which served as an introduction to the technique. The team then used a stencil cutter to cut stencils to reflow solder the Gimbal Control Board. The team applied solder paste and used a griddle to reflow the board. The process proved to be very easy, once practiced, and the team was able to assemble two Gimbal Control Boards quickly.
The board did have design flaws that were fixable. The first mistake was that the programming header was not given power. A jumper wire connected the programming header to power and fixed this problem. The second mistake was that connection of the micro-controller programming lines to the header. In system programming (ISP) usually uses SPI for communication. The Atmega128 also uses SPI for ISP, but it has separate SPI lines from the main lines for programming. These lines are not labeled as SPI lines, but rather PDI/PDO lines and is referenced in one page of the datasheet. Once this mistake was caught, two jumper wires were soldered onto the programming lines and the problem was fixed. A total of three mistakes were made, with three jumper wire fixes. Future constructions of this board should fix these mistakes on the PCB design before sending the board to be manufactured.
|

|
Physical Gimbal
The ECE 4760 final project was worked on by Phillip Tischler and Kelly Glynn. The final project consisted of the gimbal control board and the gimbal control software. It did not consist of the physical gimbal that the control system is designed to actuate. The physical gimbal was built by Derek Faust, a member of the CUAir team. This section describes the design of the physical gimbal as it motivates the design of the rest of the system.
Actuation Properties. There are many types of gimbal systems that could be used for an autonomous reconnaissance aircraft, but only two are usually used. The first is a pan-tilt gimbal which is best used when a human operator has to view a video feed and manually control a gimbal to visualize a target. However, this is not the use case that CUAir is concerned with. CUAir's system needs optimal stabilization but does not care about orientation because algorithms process the imagery. Thus, CUAir uses a roll-pitch gimbal system.
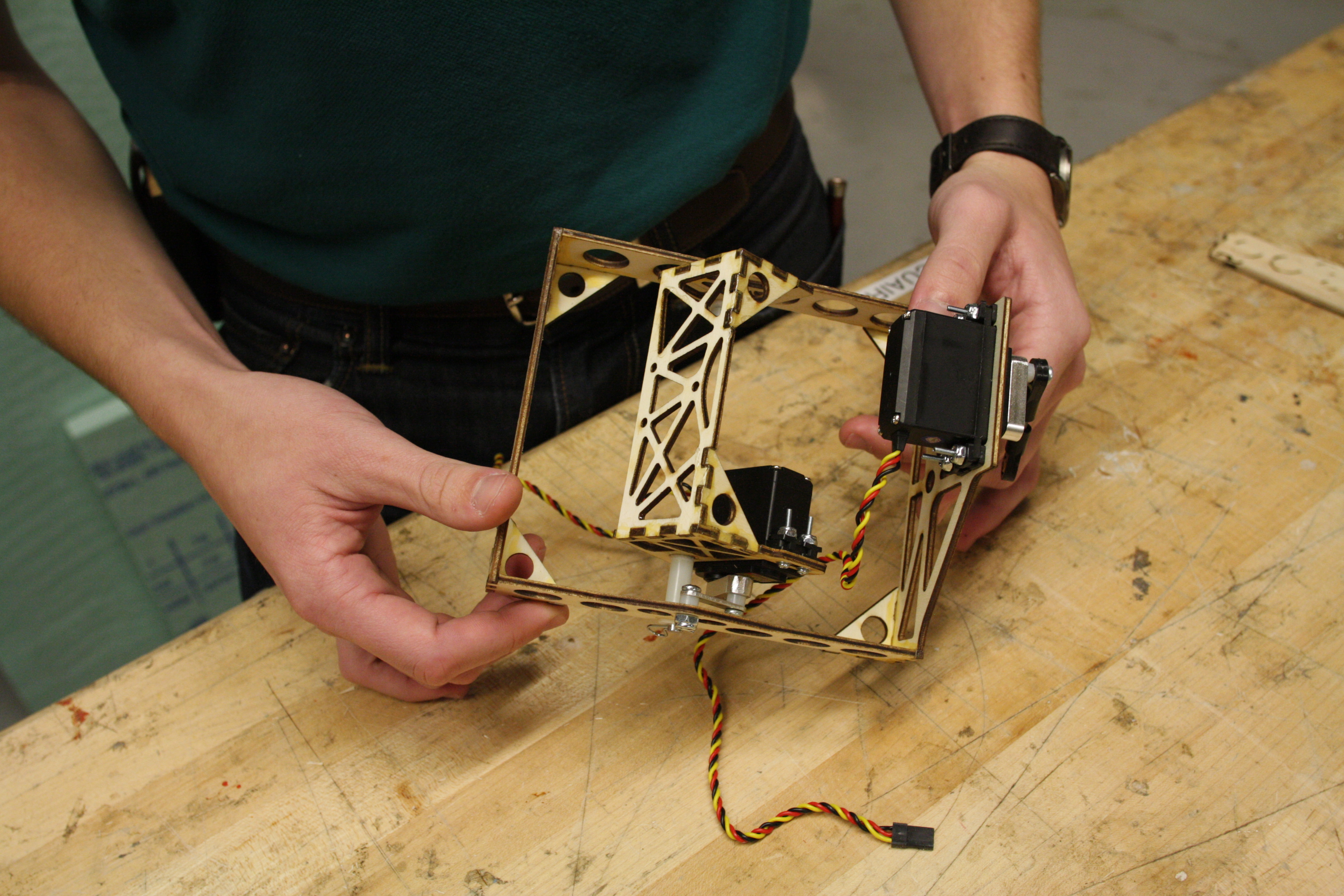
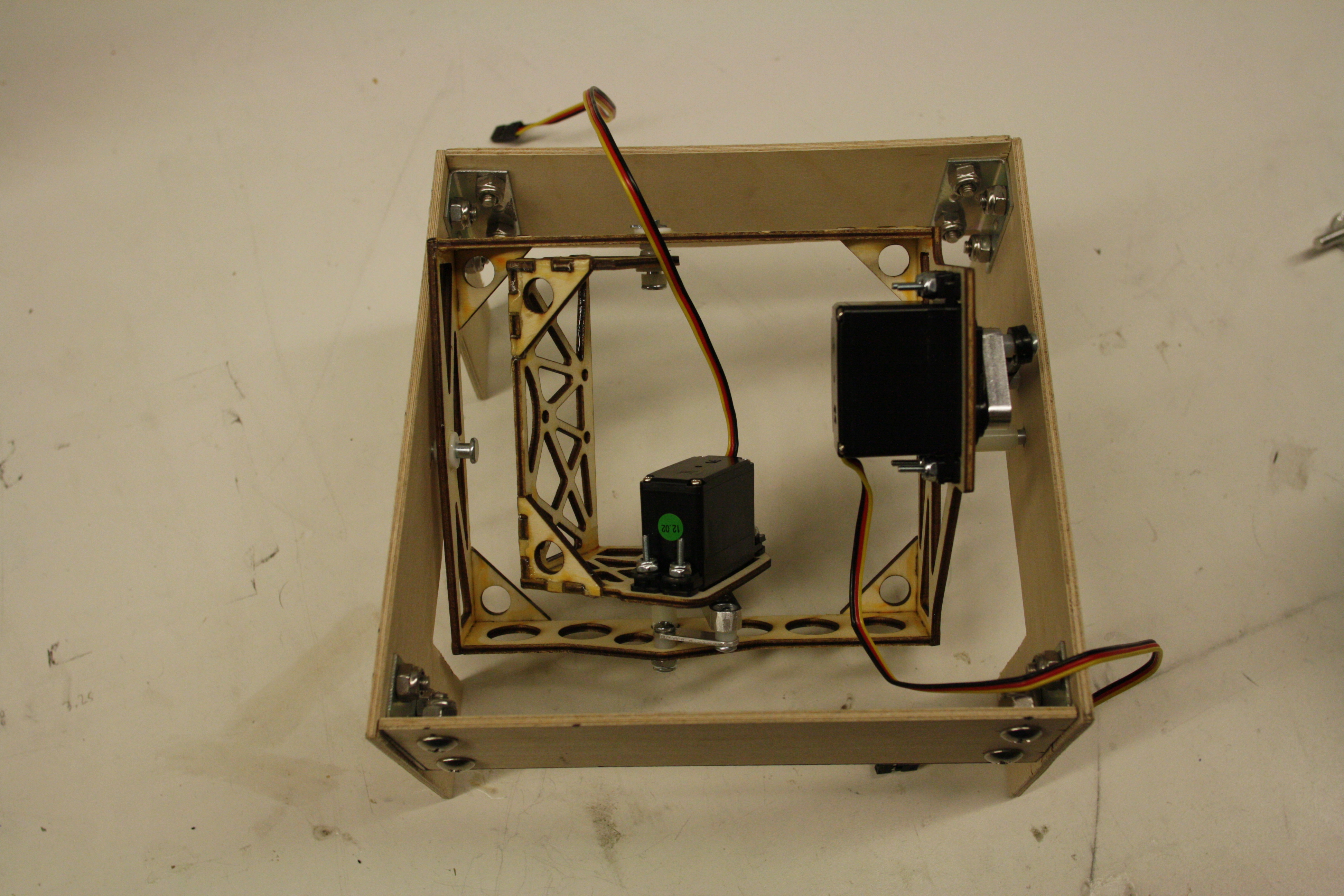
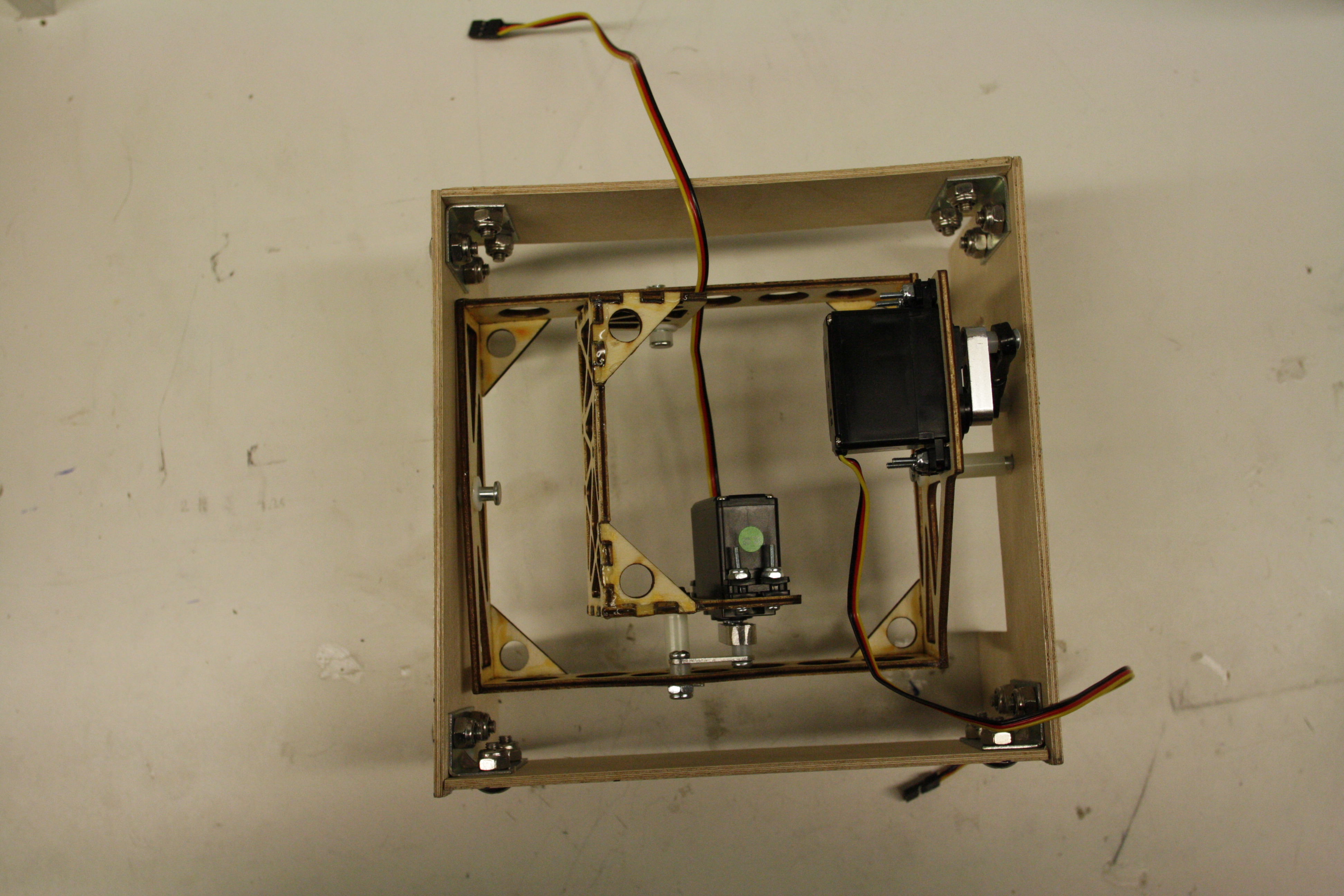
Mechanical Frame and Servos. The mechanical frame and servos form a two-axis roll-pitch gimbal system. One servo controls the actuation in the roll axis, and one servo controls the actuation in the pitch axis. The gimbal supports up to 60 degrees of actuation in the roll axis which allows the gimbal to view the farthest off-axis target. The gimbal supports up to 30 degrees of actuation in the pitch axis which allows the gimbal to stabilize for any normal ascending or descending the aircraft will perform during a mission. The images below show the gimbal's mechanical frame and servos.

|
|
|
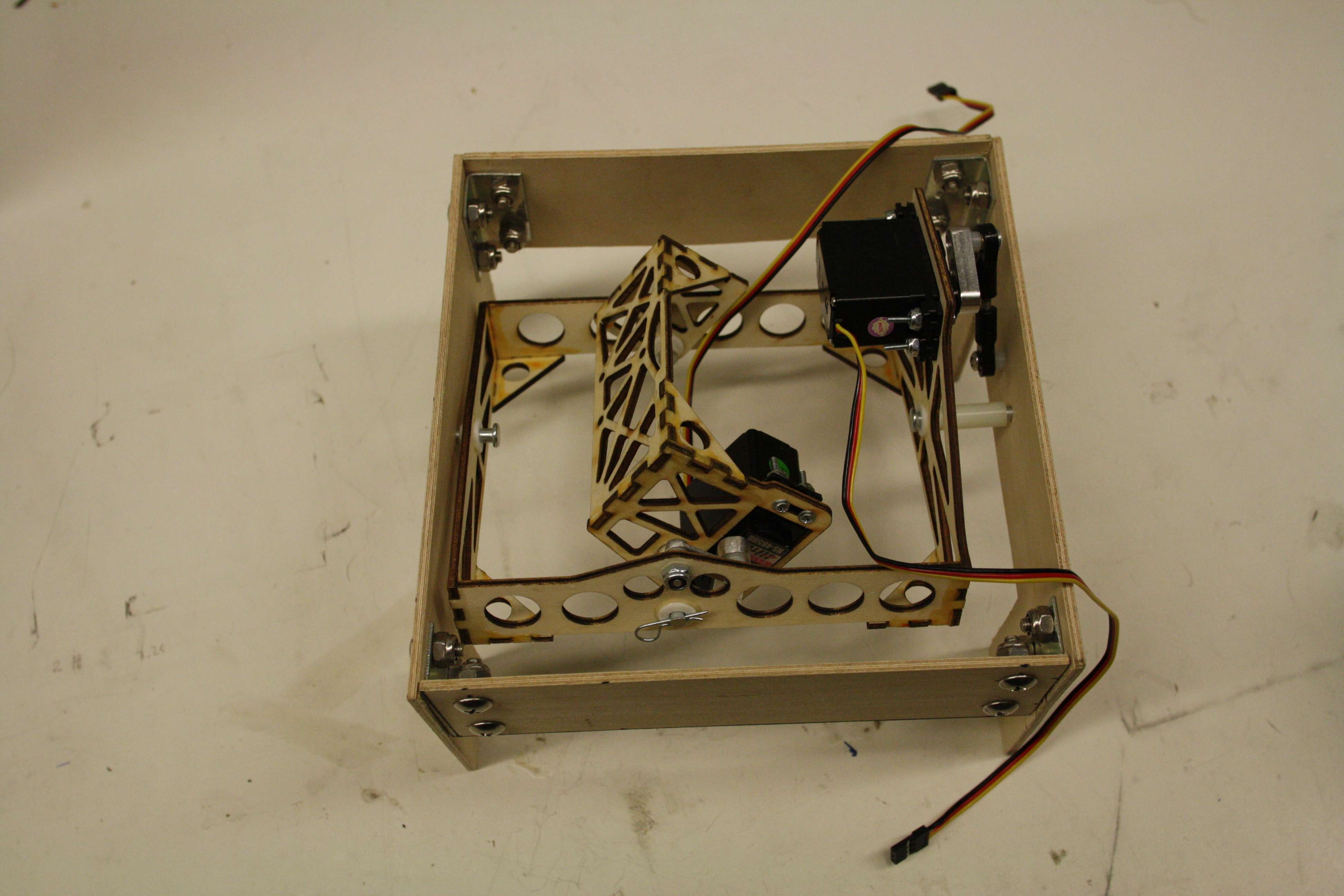
|

|

|
Hardware Problems Encountered and Fixed
There were three hardware problems that were encountered and fixed over the course of the project. The first problem was that the wrong logic level converter was ordered. The device ordered has the same name and functionality as the intended device, but has a different manufacturer and different pinout. The result was the chip stopped working and the device had to be replaced with the correct one. The second hardware problem encountered was that the design for the programming header did not account for power. A jumper wire had to be soldered from the power line to the programming header. The final hardware problem was that the Atmega 128 uses In System Programming (ISP) via SPI, but the SPI lines are not the same ones used for normal SPI communication. The Atmega 128 has seperate SPI lines for ISP, but the lines are not labeled as SPI lines. Rather, they are labeled as PDO / PDI lines. Two jumper wires were used to properly connect these lines. Once all of the hardware problems were fixed the board worked as intended. Design mistakes are to be expected in the first revision, especially as Phillip Tischler learned PCB design this semester while making the board.
Software Design
This section describes the design of the software for the Stabilized Gimbal System. The first subsection describes the software that executes on the micro-controller. The second subsection describes the software that executes on the host computer. In production this is the aircraft node on the payload computer. For the purposes of this project, the host computer executes the test client application.
The image below shows the overall software stack for the Stabilized Gimbal System. The micro-controller executable has a set of software modules that handle specific portions of the micro-controller's logic. The main application function connects these modules together to get the full gimbal control system. The message communication module is responsible for sending and receiving logical messages from the host computer. The GPS control module is responsible for receiving GPS NMEA strings, parsing them, and storing the parsed GPS data. The message communication module and the GPS control module both use the serial communication module to communicate with their underlying interfaces. The UART filestream module uses the serial communication module to access the host computer serial interface only when in debug mode. The UART filestream module provides printf functionality whereas the message communication module sends logical messages as raw binary using a custom communication protocol. The IMU module uses Peter Fluery's I2C code and the InvenSense Motion Processing Library. The servo control module uses the waveform generation of the modules to convert desired servo angles into pulse signals. The gimbal control module is used to implement the higher level logic which controls servos based on a desired behavior. The servo LED module turns on debug LEDs to help debug the system, and to indicate the current state in production. Finally, the ring buffer module is the module that ties all the components together in a highly efficient and concurrent way.
The host computer and the micro-controller communicate with one another through the MCU interface library. This library defines the messages that can be passed between the two systems, and how the messages are serialized and de-serialized. On the host computer side, the Gimbal serial communication library is the main library for controlling the Stabilized Gimbal System. This library gives the user a Gimbal Communication Manager which can send and receive logical messages to and from the micro-controller. This can be used to send control messages and receive state messages. The Serial Communication Manager abstracts the serial interface so it is not dependent on any specific message types. The Gimbal serial communication library is then integrated into a test application, which can be used to visualize state and send command messages. This application was demonstrated as part of the ECE 4760 final project demo. The CUAir aircraft node is the final integration step, a step which will be completed over winter break.

Asynchronous Serial Communication Library
The asynchronous serial communication module uses a concurrent (single reader, single writer) ring buffer to achieve concurrency. Receive interrupts signal that a byte has been received, and they insert data into the ring buffer. Send interrupts signal that a byte can be transferred, and they pull data from the ring buffer. The user can send and receive data by storing and pulling data from these ring buffers. The result is asynchrony between the user who sends and receives data and the underlying interface which does the sending and receiving. This does mean, however, that if data is not pulled from the buffer fast enough then data will be dropped. It also means that writes to the buffer may fail if there is not enough space in the buffer, which occurs when data is being written to the buffer faster than the underlying interface can send the data. This implementation also requires the extra memory to buffer data in the ring buffers.
The benefit of the asynchronous serial interface is the extreme improvement in CPU utilization. The ECE 4760 course code blocks until each byte can be sent. Lets say the UART is configured to the standard 9600 baud rate. This means 9600 bits can be transmitted per second. Lets say the user wants to send 100 bytes. For the asynchronous serial communication system, this would mean 100 store operations and 100 add operations to shift the data into the buffer for a total of 200 cycles, and about 70*100=7000 cycles for the interrupts to send data. This makes the asynchronous system take 7200 cycles total to send 100 bytes of data. The course code, which implements the block until write operation, takes more cycles. At 9600 bits per second it takes 16MHz * 100bytes / (9600bitsPerSecond/8bitsPerByte) = 1333334 cycles to send the data. This time spent waiting for the data to be sent could be used for other processing. In this example, the asynchronous communication implementation is 185 times faster than the block until written implementation.
The next piece of the asynchronous serial communication system is the method for which messages are sent, which is implemented in the message communication module. Messages are logical groupings of data that have meaning as a group. The asynchronous serial communication system uses a fixed size raw message header with a variable size raw message payload. The ECE 4760 course code uses printable characters to encode and transmit data between endpoints like the micro-controller and host computer. Lets say the system wants to transmit a 16 bit signed number. In the worst case it could be the number -32768. This would require 6 characters in order to transmit the information as plain text, whereas sending it as a raw 16 bit number would only require 2 bytes. This is a factor of 3 performance gain in amount of data that can be transmitted. There is additional performance gains when multiple pieces of data are sent in a single message because printable characters require a either a separating character or for the data to appear with fixed length and require processing. As the amount of data is sent in a single message increases, the greater improvement the fixed size header has over character separators.
The final piece of the communication system is how data is sent in a raw form. Data must be converted from the architecture dependent form that is represented on the micro-controller to a interface neutral form. This is designed to fix difference in architecture endianness, and differences in word size that causes byte padding. The conversion method is usually called byte packing, serialization, or marshaling. Data is converted from the micro-controller endianess to a specific endianness before being stored. The data is also stored as characters to prevent word alignment that is done by the compiler. This creates two data structures, the raw version which has the standard representation (e.g. integers) and the packed version which has the neutral format (e.g. array of characters). The workflow is as follows: endpoint A packs a message structure using standard assignment of variables, endpoint A packs the data into the packed version of the message structure by accounting for endianness and data padding, endpoint A sends the raw message buffer through the underlying interface (serial in this case), endpoint B receives the raw message buffer and uses the message header to determine the message type, endpoint B unpacks the raw message buffer by converting from the neutral endianness to the internal endianness, endpoint B uses the message data using standard variable assignment. This method of sending messages provides a higher performance means of sending data.
The final part of the communication protocol are the details regarding the message header and error handling. The message header contains the size of the data being sent and the message type, components which are used to unpack the message and process it afterwards. The message header also contains a sequence of known bytes which can be used to test if the current byte sequence is the start of a message. The micro-controller code scans the byte stream until it detects the start sequence. It then loads the message header and message payload. It then checks for the start sequence for the next message and so on. This helps detect corrupted streams and helps recover from errors. It should be noted that message error detection, using techniques like cyclic redundancy checks (CRC), are not performed to save on CPU overhead and complexity. The system assumes that message corruption is extremely unlikely to occur once the system is fully setup. If guarantees are desired, CRC can be added or the messages can be sent multiple times.
The end result is that data can be sent in raw form extremely efficiently in terms of bandwidth utilization and CPU utilization. This method also makes updating message types and introducing new message types an easy task. The message types and definitions are shared between the micro-controller and serial communication library. The serial communication library implements the same protocol in C++ using the Boost Library to manage serial communication ports.
Servo Control Using Waveform Generation
Servo control is quite difficult because it is a very undocumented interface. General research resulted in the following control method: send a control pulse that ranges between 1 to 2 milliseconds every 20 milliseconds. The 1 millisecond pulse corresponds to a full left deflection whereas a 2 millisecond pulse corresponds to a full right deflection. This waveform has been successful and control most servos. It has failed to control some digital servos, which is mostly believed to be caused by differences in voltage levels. This project does not require digital servos, so the waveform generated is sufficient.
Servo waveform generation is best done in hardware because it makes a more accurate signal and offloads the work from the CPU. This can be accomplished with waveform generation. The micro-controller is configured to use a timer which counts from 1 to 40,000 every 20 milliseconds. This is done by pre-scaling the clock by a factor of 8 (so it increments once every 8 clock cycles) and setting the top value of the timer's counter to 40,000 (so it resets to 0 every time it reaches 40,000. The output compare value is set between 2,000 and 4,000 to cause the timer to output a high signal between 1 to 2 milliseconds every 20 milliseconds.
The servo control module uses Q number format to accept an angle between -90 and 90 degrees. It then converts this number to map between the values of 2,000 and 4,000 so that it can assign it to the output compare register for the waveform. Form there the waveform generation outputs the control signal continuously to command the servo to the desired angular value.
GPS Packet Processing
GPS data is sent from the GPS module to the micro-controller through a serial interface. The serial communication module is used to receive this data. Once received the character stream is scanned until a new line is detected. This new line signals the end of a NMEA string. Once a full new line is received it is then split by the comma character into an array of strings. The first string indicates the message type. The message type indicates how the remainder of the strings should be parsed. The gimbal control module uses the RMC and GGA strings to obtain latitude, longitude, altitude (MSL and AGL), velocity (speed and angle), and time. Once both sentences have been received the data is stored in a GPS data structure and enqueued in a ring buffer to be received by higher level logic. The higher level logic then requests data to be received and it is pulled from the ring buffer and returned. It should be noted that all floating point variables are represented as fixed point Q number format variables. This makes math operations quicker and serialization simpler.
This modules does not convert all of the data fields of the GPS packet. Only the fields that are currently being converted were deemed useful for the current Stabilized Gimbal System. The code was made fairly modular so that it can be expanded to process additional types of NMEA strings.
IMU Software Integration and Processing
The InvenSense 6 axis IMU uses I2C communication to set and read it's registers. These registers are used to set the modes of operation for the IMU and the read the sensor's state. The IMU also has external interrupts to notify other chips when data is available to be read. The IMU also has a FIFO buffer to queue the data so that data generated by the accelerometer and gyroscope can be synchronized before it is read. The IMU also has a Digital Motion Processor (DMP) that can calculate the state as a quaternion at a rate of 200Hz.
InvenSense releases a software library through their developer portal which can be used to control the IMU. It is configured to work with the MSP430 but is designed to be integrable into other chips. The first step to using this library was to replace the interrupt, clock, and I2C portions of the software library with that of the AVR. For the I2C portion I used Peter Fleury's I2C library that can be downloaded from his website. Once the software was configured the IMU's interrupts could be configured, the FIFO buffer could be setup and enabled, and the accelerometer and gyroscope data could be obtained. To setup the DMP the IMU's firmware needs to be loaded at runtime. The software library has routines for this, but it could not be stored in the data segment of the Atmega128's memory. The firmware storage and loading routines were modified so that the data was stored in program memory and so that the firmware loading routine loaded it properly. The micro-controller receives an interrupt when data is ready, reads the FIFO buffer, parses the data into an IMU data structure, and then stores it in an IMU packet ring buffer. The higher level logic then reads that ring buffer to receive data packets.
Stabilization Algorithm
State estimation was accomplished using the Digital Motion Processor (DMP) on the MPU-6000. The DMP on the Inertial Measurement Unit (IMU) chosen outputs a quaternion at 200Hz that can be used directly as the state for stabilization and point at GPS. The quaternion values received from the DMP are converted to euler angles and used directly for stabilization. Point at GPS uses the same state estimate combined with the GPS data to get position and heading. The euler angles represent the roll and pitch of the gimbal that must be compensated for. To calculate the servo angles needed to do so, the system subtracts the roll and pitch of the gimbal from the desired roll and pitch pointing direction.
Point at GPS Algorithm
The Point at GPS algorithm used is very simple. Given the state which consists of attitude, GPS position, and heading, and the desired GPS position to point at, you calculate a pointing vector, the quaternion needed to achieve that rotation, and then the conversion from quaternion to euler angles. The pointing vector can be calculated by computing the different in GPS position for the X-Y plane component, which can be rotated by the heading to account for reference frame, and then using the difference in altitude (assumed to by AGL of the gimbal) for the Z component.
CMake Build System
CMake is a cross-platform build system generator that can be used to decouple the build system from the operating system, the compiler, the IDE, or any other such systems. The CMake system is well documented on their website, and it has become a standard for open source project development. The Stabilized Gimbal System's C++ software systems that execute on a host computer were setup to be built using CMake to demonstrate its power, its flexibility, and its simplicity. Once the CMake build system was fully understood, it made developing the C++ side of the project much simpler. This document will not serve as documentation for the CMake tool, but simply to motivate its use.
Test Client Application
The test application is a GUI which allows a user to view the gimbal messages received which contain the gimbal's current state, and also set the settings for the gimbal which will be sent to the gimbal control board via the Asynchronous Serial Communication Library. This application is designed to demonstrate functionality as well as debug problems with the gimbal. This application can also serve as a reference for the eventual integration work that will be done to integrate the Stabilized Gimbal System with the main CUAir system.

Test Client Application GUI. This application is used to view the state of the Gimbal Control Board and to change settings. The application is used to verify operation of the Stabilized Gimbal System.
System Results
This section describes the results of the Stabilized Gimbal Project. The first subsection describes results for the core functionality, components that needed to be completed for the project to be considered successful. The second subsection describes the results for internal stabilization and point at GPS, components which are necessary for the project to be considered optimal.
Communication Speed
The asynchronous communication system is used to communicate during normal gimbal operation, and during test operation. Normal operation involves communicating using the established message protocol and message data structures. The test client uses the Serial Communication Library to display the state of the gimbal and control the gimbal using command messages. This application was demonstrated during the ECE 4760 final demo and shown complete. Test operation is where various components of the board can be validated by printing the state of the micro-controller to the UART as plain text, a state representation which can be viewed with a program like Putty. This test mode was also demonstrated during the final demo, which indicates the asynchronous communication system is operating correctly. The theory of operation, which was previously discussed, shows that the system operates optimally. The team tested the communication rate and determined that the system can communicate the full state and settings at a minimum of 10Hz, which is faster than the current update rates of other CUAir systems which are typically 1Hz. The only method to improve this component would be to introduce a micro-controller which has Direct Memory Access (DMA) or to use a faster communication interface (e.g. not UART). The ECE 4760 course required an Atmega architecture micro-controller, and the interface requirements required UART, so for now this system is optimal. Although different architectures may improve the system performance, it may come at a cost of complexity and familiarity.
Servo Actuation
As previously shown in the design section, the micro-controller sends sub-degree commands to the servo. The servos and the mechanical gimbal themselves have less accuracy than the servo control signal. The final demonstration showed the servos can be controlled accurately and reliably. This system uses the PWM waveform generation, so the micro-controller CPU load is optimal (no load except to change signals). Thus, the current servo actuation mechanism is optimal. There are improvements that could be made. First, the gimbal board was unable to control certain digital servos. The team used an oscilloscope to test different signals, ones that worked and the gimbal control board which didn't, and could not find a difference other than the voltage level. The gimbal control board uses a 5V signal whereas the other controllers use a 3.3V signal. If digital servos become necessary, even though they currently are not, then a voltage divider can be integrated either off-board or in a future design revision in order to drop the control signal to 3.3V. Otherwise, the servo actuation is working perfectly.
GPS and IMU Data Processing
The GPS data is successfully being received and parsed by the Gimbal Control Board. The data is then correctly being sent to the host computer and visualized in the Test Client Application. Google Maps was used to verify that the data received from the Gimbal Control Board represents accurate position information. The GPS data is used for the point at GPS calculation, which is attempting to get a known GPS position to appear within the field of view of the camera, which currently has a field of view of 60 degrees horizontally by 40 degrees vertically. Thus, positional accuracy required for this project is no greater than that demonstrable by visual inspection and this was demonstrated during the final demonstration.

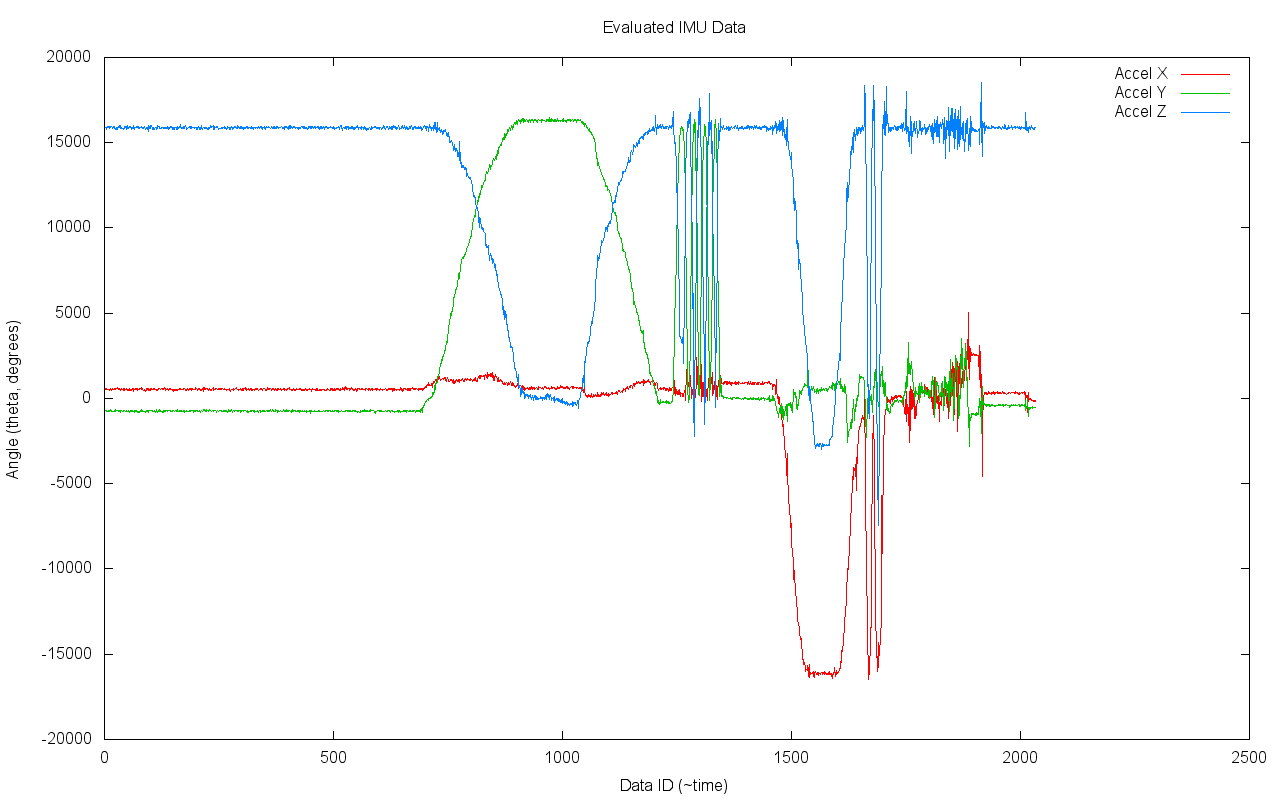
IMU Raw Data Output. The top graph shows the gyroscope readings and the bottom graph shows the accelerometer readings. Note that the angular degree measurements (y axis) show the output as received from the micro-controller, which is a 16 bit signed integer value. Note that the time scale is the ID of the data. The data was sampled at a high rate, between 40Hz and 200Hz. The graphs represent a few minutes of data. The data shows how it was rotated to align the board with the various axis. You can see this in the gyroscope output, where one axis dominates the magnitude of the rotation during different time periods. This results in the accelerometer output which indicates one axis has the entire gravity component.
Stabilization and Point at GPS
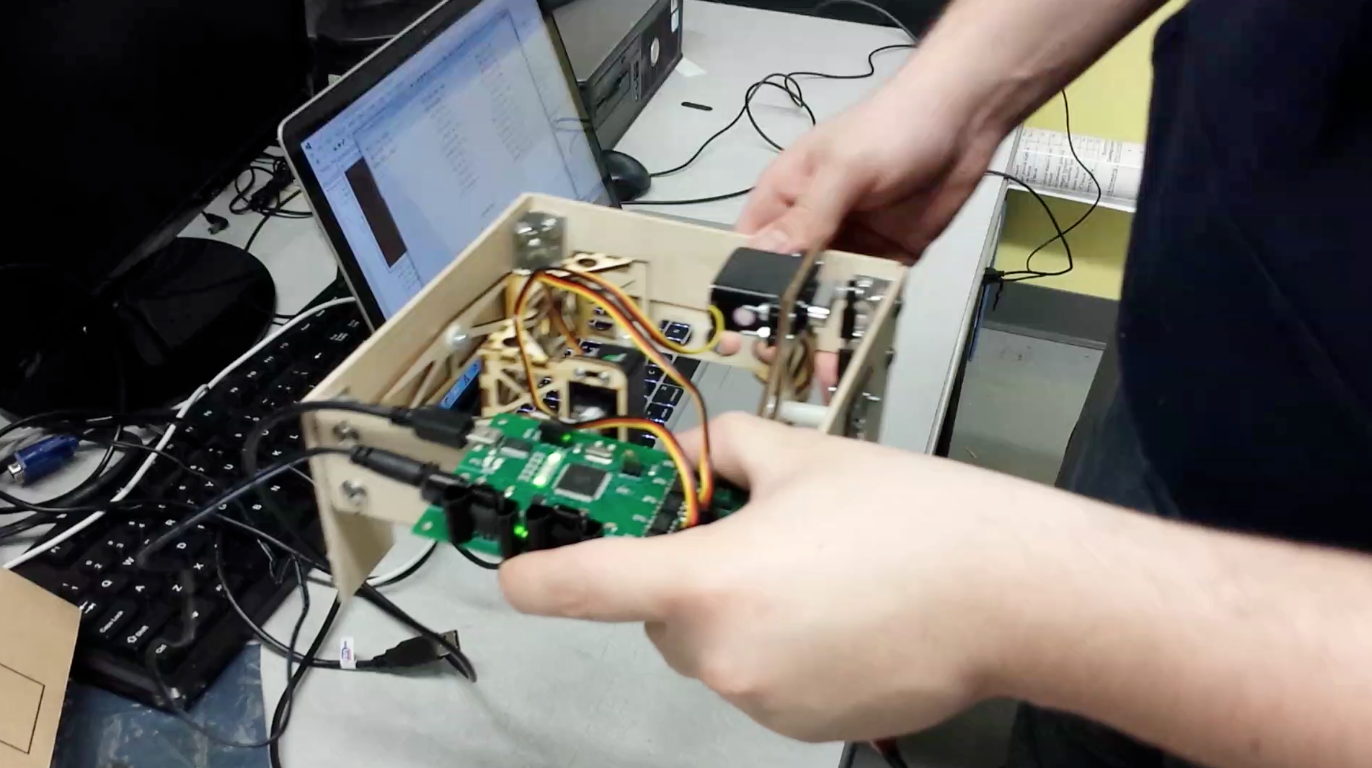
The internal stabilization algorithm was shown to work during the ECE 4760 final project demonstration. The physical gimbal moves in response to changes in the attitude of the Gimbal Control Board. The video shown below is the stabilization test that verifies its operation. The images below show a test camera, the Point Grey Flea3, which was mounted to the gimbal in order to test stabilization, a top-down view of the full stabilization test, screen-shots from the video demonstration, and imagery from the camera that were used to verify the stabilization. As shown in these images and the stabilization test video, the stabilization mode of the Stabilized Gimbal System performs as needed by the CUAir team.
At this time the Point at GPS algorithm is code-complete but untested because the team ran out of time before the end of the semester. The team plans to fully test point at GPS over winter break, and then test-fly the entire system using one of CUAir's aircrafts during spring semester.
Stabilization Test Video
Video demonstration of the Stabilized Gimbal System.
Stabilization Test Setup

The Point Grey Flea3 test camera |
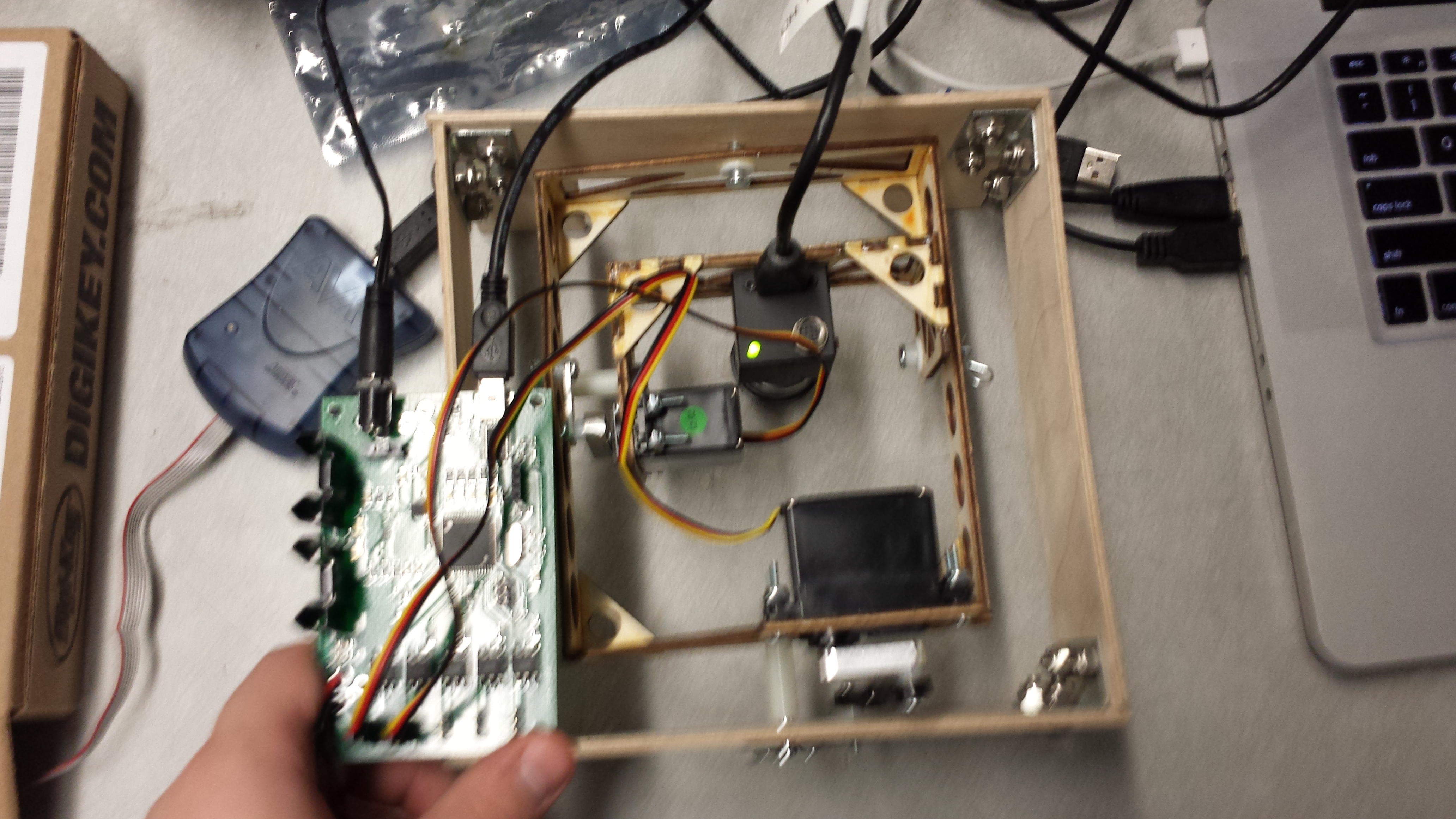
The stabilization test setup. The Gimbal Control Board is held to the test rig and the test camera is mounted on the gimbal. In deployment the gimbal and Gimbal Control Board will be mounted to the aircraft frame. |
|

|
Test Camera Imagery without Stabilization

Imagery from Test Camera without Stabilization. |

Imagery from Test Camera without Stabilization. Gimbal is rotated so that camera frame moves to the left. |
Imagery from Test Camera without Stabilization. Gimbal is rotated so that camera frame moves to the right. Camera leaves checkerboard background. |
Imagery from Test Camera without Stabilization. Gimbal is rotated so that camera frame moves to the top. Camera leaves checkerboard background. |
Test Camera Imagery with Stabilization

Imagery from Test Camera with Stabilization. |

Imagery from Test Camera with Stabilization. Gimbal is rotated so that camera frame moves to the left. Squares stay in frame and warping is minimal. |

Imagery from Test Camera with Stabilization. Gimbal is rotated so that camera frame moves to the right. Squares stay in frame and warping is minimal. There is slight motion blur, likely due to the overal motion. |

Imagery from Test Camera with Stabilization. Gimbal is rotated so that camera frame moves to the top. Squares stay in frame and warping is minimal. |
Conclusions
The Stabilized Gimbal System project is a success. The core functionality components are reliable, high performance, and exceed the specifications. The stabilization and point at GPS components will always be an active area of improvement for the system. The current stabilization and point at GPS provide good functionality and will help the CUAir team compete at the AUVSI SUAS competition. However, the biggest success of this project is the learning experience. The team learned a ton of new skills including electrical design, PCB design, reflow soldering, I2C, Inertial Measurement Units, and various mathematical topics regarding the functionality of the system.
Design and Results Expectations
The expected design and results for the core functionality went exactly as planned. The system is extremely reliable and performs well. It will definitely have a positive impact on the CUAir team during competition. The design and results for the stabilization and point at GPS functionality exceeded expectations incredibly. The team did not expect that re-flow soldering a lead-less package would succeed during the first attempt. Similarly, previous attempts by the CUAir team to obtain data from Inertial Measurement Units had failed. The design and results achieved make the project successful based on expectation at the onset.
Intellectual Property
The I2C software library is intellectual property of Peter Fleury and is referenced below. The Motion Processing Library is intellectual property of InvenSense and is also referenced below. No other software packages were used during the course of this project.
The system developed is the property of CUAir: Cornell University's Unmanned Air Systems Team. The system developed is described here both as advertisement for the CUAir team and to aid in future academic projects. Information presented here may be used without restriction for other projects as long as it is properly attributed to the CUAir team and to Phillip Tischler, and so long as information obtained here is not used in competition against the CUAir team.
Source documents and code are purposely with-held from this webpage so that CUAir can maintain its competitive edge. If you would like further information regarding design or testing, please contact Phillip Tischler at pmt43@cornell.edu (until 06/01/14) and pmtischler@gmail.com.
Ethical Considerations
There are no known ethical considerations regarding the design of the Stabilized Gimbal System for the CUAir team and the AUVSI SUAS Competition.
Legal Considerations
There are no known legal considerations regarding the Stabilized Gimbal System because it is not being used for commercial means. If the system was to be re-purposed for commercial means then the licenses for the I2C library from Peter Fluery and the Motion Processing Library from InvenSense should be re-examined.
Work Completed by Members of Team
The table below shows all tasks that were necessary to complete the project and who completed the tasks. Phillip Tischler and Kelly Glynn are the project members for the ECE 4760 Final Project. Joel Heck and Derek Faust are members of CUAir who were also on the project but not in the ECE 4760 Final Project. The project was for the CUAir team. Joel Heck is the Team Lead of CUAir, and was thus responsible for funding the project and making any purchases. Subsequently he was the person who actually performed any purchasing of components. Derek Faust is another member of CUAir. He was responsible for building the physical gimbal. Construction of the physical gimbal was not part of the ECE 4760 Final Project. The final project's scope was limited to the design of the electrical hardware and the development of the micro-controller and host computer code.
| Task | Person Who Completed Task |
| Project Idea | Phillip Tischler |
| Project Proposal | Phillip Tischler |
| System Design | Phillip Tischler |
| Electronic Component Selection | Phillip Tischler |
| Printed Circuit Board Design | Phillip Tischler |
| Creation of Excel Sheet for Purchasing | Phillip Tischler |
| Purchasing of Components | Joel Heck |
| Assembly of PCB Board 1 | Phillip Tischler and Joel Heck |
| Assembly of PCB Board 2 | Phillip Tischler |
| Physical Gimbal Design and Construction | Derek Faust |
| Custom Micro-Controller Software | Phillip Tischler |
| Custom Host-Computer Software | Phillip Tischler |
| Identification of Peter Fleury's I2C Code | Kelly Glynn |
| Integration of Peter Fleury's I2C Code | Phillip Tischler |
| Integration of InvenSense IMU Code | Phillip Tischler |
| Identification of Wikipedia's Math for Converting Quaternion to Euler Angles | Kelly Glynn |
| Code for Quaternion Conversion | Phillip Tischler |
| Stabilization Algorithm | Phillip Tischler |
| Point at GPS Algorithm | Phillip Tischler |
| Gimbal Control System Report (This Document) | Phillip Tischler |
| CE 4760 Final Report Website | Phillip Tischler |
References
- aprs.gids.nl. Gps - nmea sentence information. http://aprs.gids.nl/nmea/, December 2013.
- AUVSI. Auvsi seafarer chapter. http://www.auvsi-seafarer.org/, December 2013.
- Advanced Circuits. Printed circuit board full spec 2-layer pcb design specials. http://www.4pcb.com/33-each-pcbs/index.html, December 2013.
- CMake.org. Cmake - cross platform make. http://www.cmake.org/, December 2013.
- CTS Electronic Components. Mp series quartz crystal datasheet. http://www.ctscorp.com/components/Datasheets/008-0308-0.pdf, December 2013.
- FCI Connect. Mini usb b-type smt receptacle datasheet. http://portal.fciconnect.com/Comergent//fci/drawing/10033526.pdf, December 2013.
- Atmel Corporation. Atmega128 atmega 128 datasheet - doc 2467. http://www.atmel.com/Images/doc2467.pdf, December 2013.
- LITE-ON Technology Corporation. 4n35 datasheet. http:/media.digikey.com/pdf/Data%20Sheets/Lite-On%20PDFs/4N35_37.pdf, December 2013.
- LITE-ON Technology Corporation. Ltst-c150gkt datasheet - green led. http://media.digikey.com/pdf/Data%20Sheets/Lite-On%20PDFs/LTST-C150GKT.pdf, December 2013.
- CUAir. Cuair: Cornell university unmanned air systems. http://cuair.engineering.cornell.edu/, December 2013.
- Peter Fleury. Peter Fleury online: Avr software. http://homepage.hispeed.ch/peterfleury/avr-software.html, December 2013.
- gpsinformation.org. Nmea data. http://www.gpsinformation.org/dale/nmea.htm, December 2013.
- Adafruit Industries. Adafruit ultimate gps breakout - 66 channel w/10 hz updates - version 3. http://www.adafruit.com/products/746#Description, December 2013.
- InvenSense. 6-axis platform independent solution based on the embedded motionapps 5.1 architecture. http://www.invensense.com/developers/index.php?_r=downloads&ajax=dlfile&file=Embedded_MotionDriver_v5.1.zip, December 2013.
- InvenSense. Mpu-6000 and mpu-6050 product speci cation. http://www.cdiweb.com/datasheets/invensense/MPU-6050_DataSheet_V3%204.pdf, December 2013.
- InvenSense. Mpu-6000 and mpu-6050 register map and descriptions revision 4.0. http://invensense.com/mems/gyro/documents/RM-MPU-6000A.pdf, December 2013.
- InvenSense. Mpu-6000/6050 six-axis (gyro + accelerometer) mems motiontracking devices. http://www.invensense.com/mems/gyro/mpu6050.html, December 2013.
- Professor Bruce Land. Cornell university ece 4760 course webpage. http://people.ece.cornell.edu/land/courses/ece4760/, December 2013.
- Future Technology Devices International Ltd. Ft232r usb uart ic ft232r usb uart ic datasheet. http://www.ftdichip.com/Support/Documents/DataSheets/ICs/DS_FT232R.pdf, December 2013.
- Fairchild Semiconductor. Lm78xx / lm78xxa 3-terminal 1 a positive voltage regulator datasheet. http://www.fairchildsemi.com/ds/LM/LM7805.pdf, December 2013.
- NXP Semiconductors. Pca9306 - dual bidirectional i2c-bus and smbus voltage-level translator. http://www.nxp.com/documents/data_sheet/PCA9306.pdf, December 2013.
- Sparkfun. Dc barrel power jack/connector. https://www.sparkfun.com/products/119, December 2013.
- Sparkfun. Spdt mini power switch. https://www.sparkfun.com/products/102, December 2013.
- STMicroelectronics. Ld1117 adjustable and xed low drop positive voltage regulator. http://www.st.com/web/en/resource/technical/document/datasheet/CD00000544.pdf, December 2013.
- Wikipedia. Conversion between quaternions and euler angles. http://en.wikipedia.org/wiki/Conversion_between_quaternions_and_Euler_angles, December 2013.
- Wikipedia. Q (number format). http://en.wikipedia.org/wiki/Q_(number_format), December 2013.
- Wikipedia. Quaternion. http://en.wikipedia.org/wiki/Quaternion, December 2013.