The robot in action - it's learning to drive in a straight line.
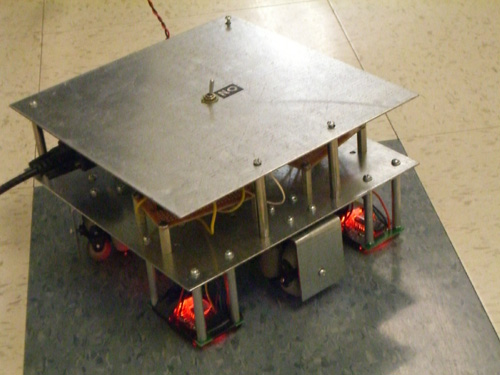
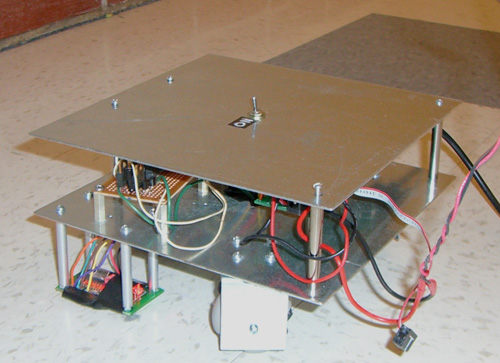
Top view of the vehicle chassis, sporting a top-mounted power switch for ease of use.
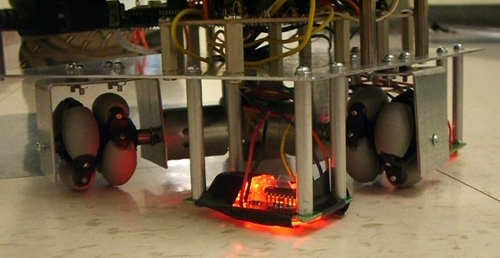
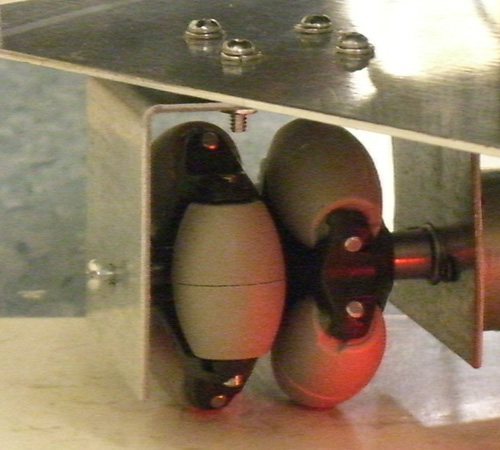
Side view of the vehicle chassis with optical sensor (illuminated by the red LED) and wheels visible at the bottom, and H-bridge motor drivers visible at the top.
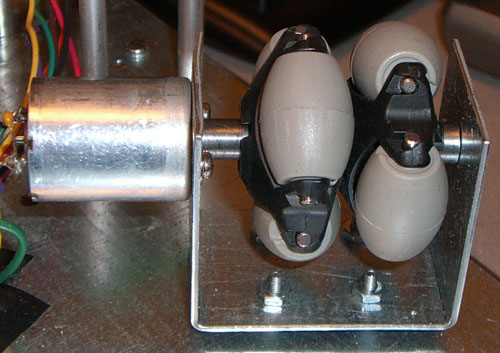
View of one of the omni-directional wheels mounted on the drive shaft and attached to the motor.
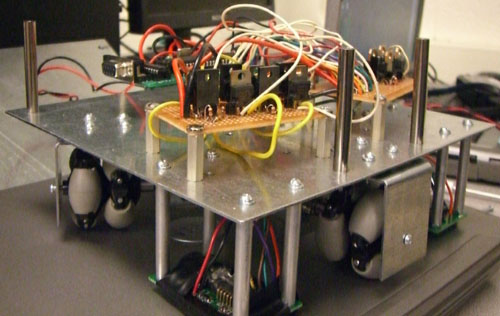
View of the vehicle with the top removed. Mounted on top of the steel plate, the three H-bridges are visible on the two boards in the foreground and the ATmega644 target board is visible in the background. Both optical sensors and two of the wheels are visible on the underside of the chassis.

A bottom view of one of the optical sensors. The lens is the small circle in the center.
View of one of the omni-directional wheels mounted on the bottom of the chassis.
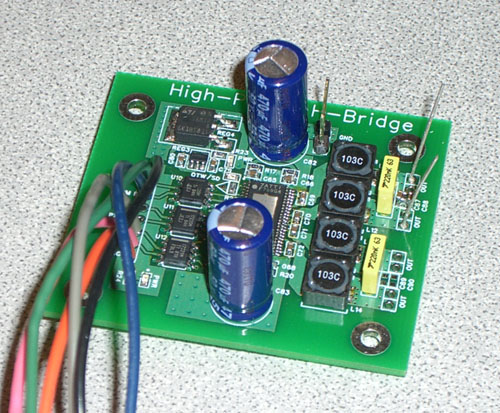
The original H-Bridge design which we weren't able to use because of PWM generation difficulties.
William attaching wires to the motors.

Nicole and William working on the project - writing code and salvaging components.

William testing the vehicle in the hallway outside of the lab.

William and Nicole writing code for the project.
ECE 4760 Project by:
Nicole Rodia (ncr6)
William Westrick (wjw27)