Abstract:
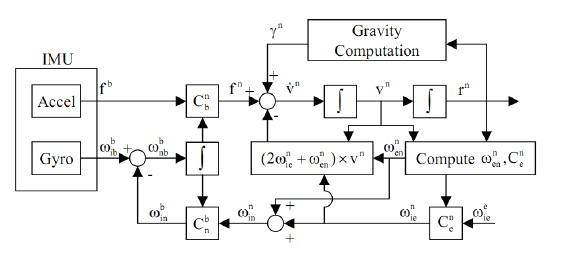
Our goal was to design and construct a simple Inertial Navigation System using
micro-electromechanical systems (MEMS) sensors. The sensors are processed by a
microcontroller and external floating point unit to estimate current state. Although we
made good progress, signifcant dificulties along the way prevented us from developing
a system that lived up to our initial expectations. We were, however, able to obtain
modest results with the system we developed and, given more time, would have been
able to improve upon them.
Full Report (PDF)