Bluetooth Communication
In order to communicate between the glove and the robot we utilized two HC-05 Bluetooth modules to wirelessly transmit data. The modules interact with each PIC over UART and will transmit wirelessly transmit one way, with the glove Bluetooth module being configured as a master while the robot’s Bluetooth module being configured as the slave. Each module will be configured to pair with any available Bluetooth module to make it easy to establish a connection. The state output on each module indicates whether or not the module is connected, this info will be relayed to the PIC so that if a connection is interrupted then the robot will stop so as not to be driving without control.
Data Format
Data being transmitted between the PICs will consist of commands that are used to control the robot, which means each transmission will consist of an individual character. These characters are:
‘s’ - stop
‘f’ - move forward
‘b’ - move backward
‘l’ - turn left
‘r’ - turn right
These are determined as discussed in the flex sensor section. This configuration allows for the control on the robot end to be simple, it simply interprets the character that was received from bluetooth module and enacts the appropriate movement.
Configuration Command Sets and Pairing
Initial configuration of the Bluetooth modules is done utilizing the USB to UART converters available within the 4760 lab. The HC-05 modules utilize AT Commands in order to set different parameters, such as baud rate, slave/master role, and determining which devices it can pair with. The enable pin on the HC-05 module is set to high in order to put the module into AT command mode, which is done on our boards by connecting a jumper between 4.5 V power and the EN pin on the module. A PUTTY terminal can then be used to send the appropriate AT commands needed by the module to properly configure each individual module for its respective role. We wanted both modules to be set to a 9600 baud rate, which is standard for the PICs, and to be able to pair with any bluetooth device - this makes automatic pairing with the other HC-05 module easy. There is an option to establish a pairing with only a specific address, which in our case would have been the other HC-05 module. This setting however proved to be finicky and often difficult to connect, setting the default to connecting with any device made pairing with the other HC-05 module easy. Depending on the settings currently on the modules, your PuTTY terminal might have to be set to either have a 9600 or 38400 baud rate. 9600 is the rate we are configuring for, 38400 is the default baud rate The following command sets were used to configure each module:
For the master module
AT+ORGL - this sets the module back to its original factory settings. Note: after running this command it might be necessary to set the baud rate of your terminal to be 38400.
AT+CMODE=1 - this sets the module to connect to any device
AT+ROLE=1 - sets role as master
AT+BAUD=9600,0,0 - sets baud rate to 9600 with no parity and a 1 bit stop bit
For the slave module
AT+ORGL
AT+CMODE=1
AT+ROLE=0 - sets role as slave
AT+BAUD=9600,0,0
At this point the two modules should be ready to pair. Once complete remove the high logic being sent to the Enable pin and power cycle each module. When the modules are turned on, the master will attempt to establish a connection with the slave module and should do so within a few seconds of both modules turning on. You can determine whether or not a connection is established by looking at the output of the STATE pin of the module, which will be set to a high logic level when a connection is established, or by observing the LED that is on the module. When a connection is established, the red LED will blink twice quickly in succession while then turning off for a bit longer of a period of time than the blinks. Both modules should be exhibiting the same LED blinking pattern, if the LED of either module is blinking at a set period and not with two blinks in rapid succession, then a connection is not established.
Power and Hardware Requirements for Bluetooth
The HC-05 module alone runs on 3.3 V, however we purchased a module that included a breakout board with 6 pins to simplify the interface. The specs of the module we purchased allowed for an input voltage ranging from 3.3 to 6 Volts - it was designed to make the module easy to interface with an Arduino’s 5V supply.
Collision Avoidance using Ultrasonic Sensor
We wanted to implement collision detection to avoid hitting any objects that might be in the path of the robot. The robot will stop as soon as it realizes that there is a nearby object, approximately 5 inches away, that is obstructing its path. In our demo, the ultrasonic did not function properly so we moved on with the demo without using the ultrasonic. The rest of the project works perfectly without the ultrasonic. Although we were unable to get the sensor working properly, we know that our understanding of it is correct which is explained in this section.
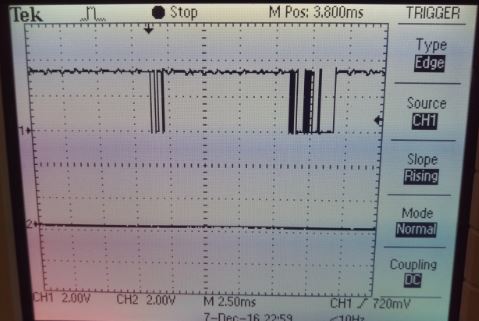
The ultrasonic distance measuring sensor HC-SR04 was used to detect when an object was nearby. The microcontroller would send a trigger signal to the ultrasonic sensor. The trigger is at least 1 millisecond long. After the trigger ends, the ultrasonic sensor will send out 8 bursts of ultrasound at 40kHz. The echo signal will then go high. The time that the echo signal is high is proportional to the distance to the object. The total period between the trigger is 60 milliseconds, so the distance date will be updated every 60 milliseconds.
The total distance traveled by the ultrasound is equivalent to the total time that the echo is high times the speed of sound 340meters per second. We divide this number by 2 to get the distance to the object because the sound travels from the sensor to the object and bounces back to the sensor. The formula shown in the background math section was implemented on the microcontroller to get the distance and it was changed to make the distance in terms of centimeters.
DC Motor Control
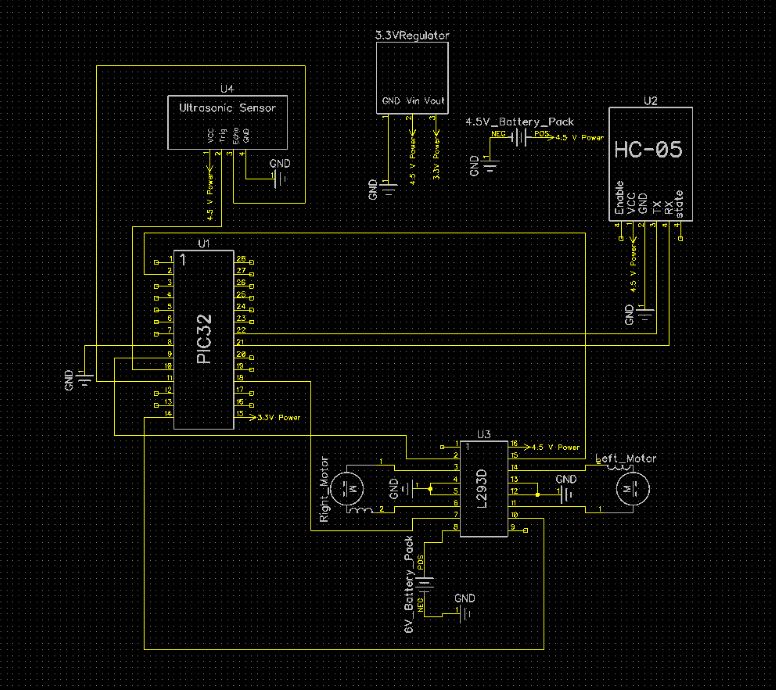
We used DC motors for the wheels of the robot. Our robot had two wheels and one caster ball to balance it in the front. We used the L293DNE H-bridge to attain bidirectional control of the motors. The robot was able to move forward, backward, left and right. The H-bridge is able to control two motors at once while providing the ability for bidirectional control. We knew that the motors would always be enabled so we connected both the enable signals to VDD. It helped reduce the number of pins we used on the microcontroller. PAdditionally the pins 4, 5, 12 and 13 were connected to ground. There were two signals from the microcontroller sent to each motor to control them. The schematic of this setup can be seen in the Appendix section. We setup both the motors according to the schematic shown in Figure 5 of the L293D datasheet.
The direction of the robot corresponded to different configurations of the two motors. If the user wants to move the robot forward then both the motors should move forward. Similarly, if the user wants to move the robot backward, then both the motors will move backwards. However if the robot needs to move to the right then the left motor will move forward while the right motor will move backward. This enables the robot to make a quick right turn. In a similar way, if the user wants to move the robot to the left then the right motor will move forward while the left motor will move backward. It is much better to turn both the wheels at once because it provides a better axis of rotation.
The motors used more power than expected and drained the battery after about an hour of extensive testing. We had a switch connected to the battery pack which helped to regulate the power to the motors. It made it easy to turn off the power to the motors when we were not testing it thereby increasing the time the batteries were used to do real work. We used 4AA batters for a total of 6V to power the motors. Anything lower than 5.4V resulted in one of the motors not functioning properly.
We separated the motor control functions into their own file motor.c and motor.h. It is good design to make abstractions and really helped when we were debugging other sensors. The motors were setup in main.c file but the motor.c file had the functions that would adjust PWM to provide correct robot movement. The methods in motor.c are conveniently named so they could be called by the main.c file for the appropriate user command.
Our initial thought was to use digital output pins from the microcontroller to control the motors. However, we decided to use PWM after reading over previous projects from ECE 4760. There were other projects that had used the same h-bridge and they did not get good results with only digital output pins. The motors would run at different speeds thus the robot could not properly drive in a straight line. PWM solves this problem thereby allowing the robot to drive in a straight line.
Flex Sensor
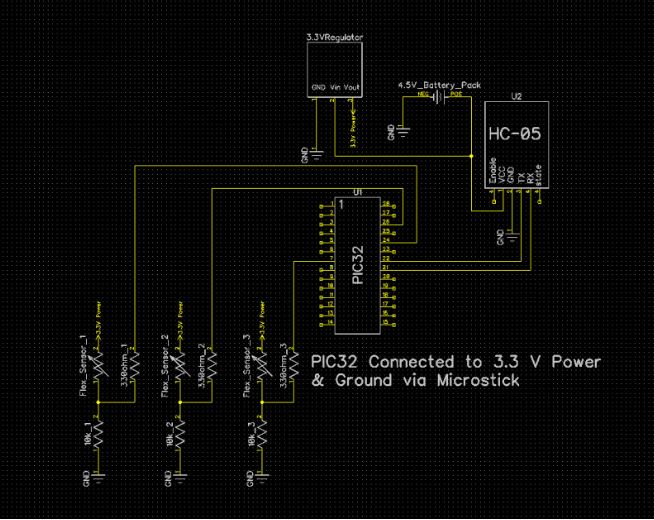
In order to enable a glove to control a robot, we used flex sensors taped to different fingers on the glove to get movement from each finger. These flex sensors act as variable resistors, the more the sensor bends, the higher the resistance of the sensor. The resistance of an unbent flex sensor was around 10 kΩ whereas a bent flex sensor got to around 33 kΩ. In order to get the reading of the sensor we created a simple voltage divider circuit using the setup
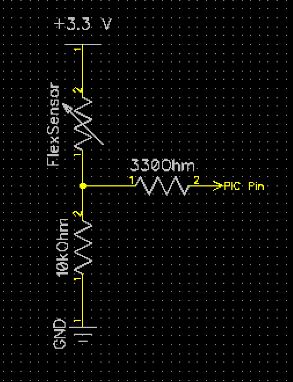
The voltage at the junction between the sensor and the 10 kΩ resistor was probed using a 330Ω resistor, which is used to prevent damage to the PIC’s pins, that was connected to an ADC on the PIC. As the flex sensor bends more, the value that the PIC sees goes down. The pins used on the PIC are able to connect to the PIC’s ADC.
Software Structure
In order to read from the three flex sensors we needed to enable scanning mode for the PIC’s ADC. Scan mode has the PIC constantly polling the ADC values at the pins specified in the configuration parameters. This allowed us to read from the three PIC pins that the sensors were connected to rapidly so that we would always have an updated value for each sensor. This is different than the “manual” mode, which only updates when requested and can only support readings from 2 ADC pins, compared to scan mode which supports every pin. We had one thread that was constantly reading from the ADC buffer and calculating which command should be sent over UART to the bluetooth module.
Control Scheme
The flex sensors we chose to act as triggers rather than having commands dependent on the specific reading of the sensor. This means that the value of the flex sensor needs to be below a certain threshold in order to be considered as bent, and the fact that it is bent or not is all that is being considered when determining the command for the robot. The raw values that we were reading from the sensors were not consistent enough to do something like regulate the speed of the motors, i.e. bending the sensors more makes the motors go faster. We wanted our control scheme to include 5 different commands; forward, backward, left, right, and stop. As a result we needed 3 flex sensors in order to have at least 5 different combinations of commands. We attached the three flex sensors to the glove’s index, ring, and pinkie fingers - three fingers we felt had enough independence to allow for 5 distinct gestures. The resulting control scheme came from the following gestures:
| Command |
Control Scheme |
| Stop |
All fingers extended |
| Forward |
All fingers bent |
| Left |
Index finger bent, ring and pinkie fingers extended |
| Right |
Ring and pinkie fingers bent, index finger extended |
| Backward |
Ring finger bent, index and pinkie finger extended |
Power Architecture
The premise of our project was to make a mobile robot that is easy for a standalone user to control, as a result we needed a power supply that could move with both the robot and the controller. To accomplish this we ended up using a battery based system that used AA batteries as the power source. AA batteries are cheap and easy to purchase at a store which makes them very accessible compared to say LiPO or some other lithium based battery choices. One drawback however is we had to design our power systems around the cell voltage of the AA batteries which was 1.5 Volts. Battery packs are readily available that store 2, 3, and 4 batteries in one pack which connect these batteries in series, resulting in pack voltages of 3, 4.5, and 6 Volts.
Glove Power System
The main power draws on the glove system were the PIC, which runs on 3.3 V power, and HC-05 bluetooth module, which had an input range of 3.3 - 6V. To accommodate this we ended up using a battery pack that could store 3 AA batteries, resulting in a pack voltage of 4.5 V. In order to power the PIC and bias the flex sensors, we used a MCP1702 3.3 V regulator that provided a stable power supply.
During initial prototyping we had noticed that the HC-05 module could be powered off of the 3.3V output of the MicroStick we were using. As a result we attempted to use a pack with 2 AA batteries initially, however this did not provide sufficient power to the system, with all components turning off and on inconsistently.
Robot Power Systems
For the HC-05 module and PIC we replicated the power structure of the glove based system, using a 3 battery pack and 3.3 V regulator. However, to power the DC motors we needed a source of at least 5.4 V, as a result we added a 4 battery pack to provide 6 Volts to the motors. This was connected to the L293D H-Bridge which used signals from the PIC to regulate power to the motors.
We did not attempt isolation with our circuitry for the robot. However after repeated testing we did not see any serious side effects from the motors that we were using that would have jeopardized successful robot operation. The other power supplies were robust enough that input power to either the PIC or the HC-05 was never dropped low enough to turn off either system.