
Introduction
Methods
Results/Discussion
Code
References
|
|
Results and Discussion
The code as provided for download at the link on
the left, allows for five different input variables. These are
in same order as used as arguments in the
code:
n
-
The size of the population to be
tested
hidden
-
The number of hidden units each ant
has
mFactor
-
The mutation factor, i.e. after each round the offspring will be
mutated by a
random number chosen from +/- mFactor
selectiveStrength -defines what fraction of the population is kept
for the generation of the next
offspring, i.e. a selective strength of 0.2 means the top 20% of the
generation
get to produce offspring for the next
generation
cycles
- The number of evolutionary cycles the program should
run for
Simulation 1 - How many
evolutionary cycles does it require to converge to a
solution?
Simulation 1 was run using the following
parameters
n = 10
000
hidden =
5
mFactor =
0.2
selectiveStrength =
0.2
cycles = 20
In all simulations it is
worth noting that only a small fraction (generally less than 1%)
achieved an evolutionary fitness (i.e. the number of food found on
the track) of higher than 0. Therefore in the following figure
the number of non-zero ants in the population of 10 000 is shown as
well as the mean fitness of these elements:
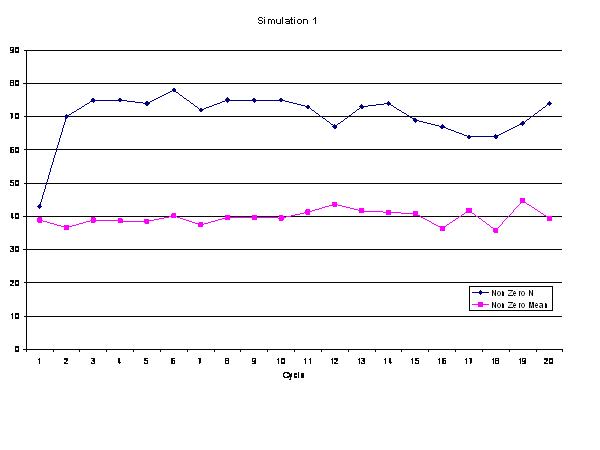
This graph shows that
the number of ants that can evolve from a random population at a
mutation strength of 0.2 appears to level off after as few as 2-3
cycles. Taking a histogram of the data at each time point
reveals a similar result: movie. It is important to note here that only
the non-zero data is graphed. This can decrease the
non-zero mean as well when more 'ants' move up from 0 to the low
range of fitness and therefore a graph of overall mean fitness
versus evolutionary cycle is more informative:
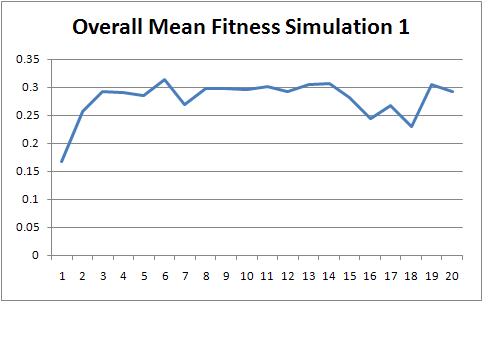
Again, one can see clearly that while there is a drastic
change after the first and second cycle, the overall fitness mean
levels off quickly after the third cycle. Similarly the
maximum fitness (in this case it was 81) was generally reached by
the third evolutionary cycle in this simulation and others.
Thus, for all remaining simulations a cycle number of 10 was
considered sufficient.
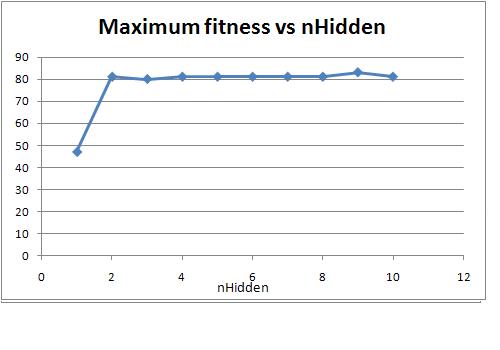
Simulation 2 - What happens if
you change the number of hidden
units?
The second simulation tested different number
of hidden units and how this would affect the overall mean fitness
and the maximum fitness in the final population. The
parameters used
were:
n = 10
000
hidden = between 1 and
10
mFactor =
0.2
selectiveStrength =
0.2
cycles = 10
The results are summarized
in the graphs below:
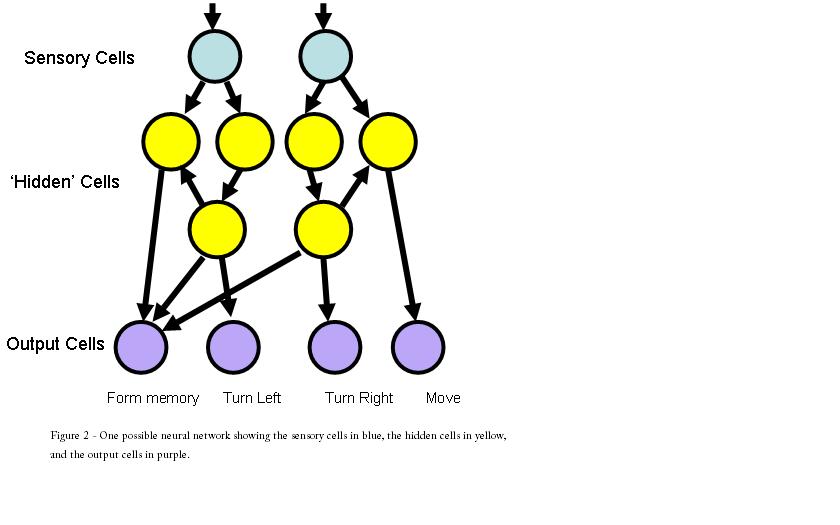
What was particularly interesting about
this simulation was that with only one hidden unit a
single event was witnessed where the maximum fitness was
76, which is suprisingly close to the overall maximum fitness
witnessed of 83. The neural circuitry of this 'ant' is shown
below:
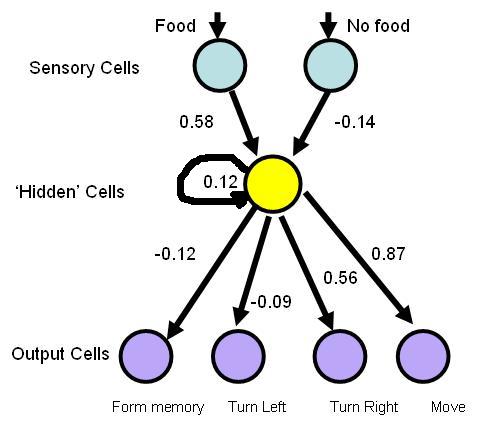
This circuitry resulted in a very
efficient algorithm that if there was food in front of the ant,
it would move forward, and if there was no food, it would alternate
between moving forward 1-2 times and turning right 3-4 times.
This appears strange at first, as the no food sense with a synaptic
connection of -0.14 should not trigger any response. However,
it is important to remember that as the ant traverses the trail each
unit has a memory of its state. The ant if (and only if) it
starts out with food in front of it, will (as with our trail) build
up close to a state level of 1 before it doesn't see any food.
In this case, while its state is reduced by -0.14, it is still above
threshold (0.7) and activates the outputs. Though in some
cases it may take more than one time step before any output is above
threshold and that is when both the turn right and the move forward
get activated simultaneously. In this case however, the code
checks the turn right first and if that is activated decides on that
path of action. Thus, taking advantage of nearly 'loop holes'
in the code, the evolutionary algorithm has produced a very
efficient single hidden unit ant for tracking trails.
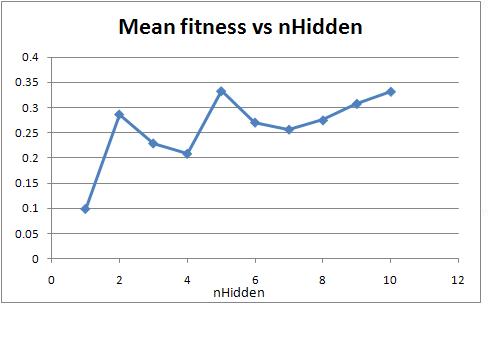
In
general though, one can see from the graphs that the
maximum of above 80 fitness is quickly reached at
2-3 units, a small optimum appears to occur at 5 units and
after which the increase in mean fitness is only minimal.
The computer used for modelling unfortunately was not able to
support simulations above 10 hidden units and would throw an
out of memory error, however given the data one can assume
that the increase in fitness would not have been
drastic.
Simulation 3 - How does the mutation factor
affect the maximum and mean fitness?
The third simulation tested different mutation factors and
how this would affect the overall mean fitness and the maximum
fitness in the final population. The parameters used
were:
n = 10
000
hidden
= 5
mFactor = between 0.1 and
5
selectiveStrength =
0.2
cycles = 10
The results are summarized
in the graphs below:
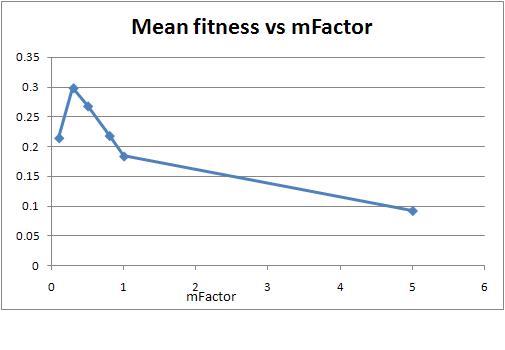
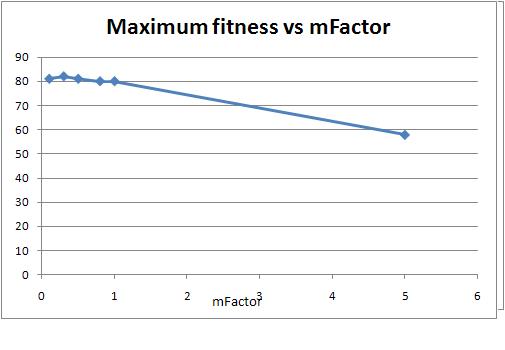
The results of this simulation is very much as
expected. A too low or way too high mutation factor does not
lead to a good evolutionary algorithm. The optimum as can be
seen from the graphs, appears to be around 0.2-0.4. It is also
good to see that at very high mFactors (=5), the mean and maximum
fitness drop strongly, verifying that our evolutionary algorithm is
functioning correctly and producing significantly stronger results
than a simple random trial and
error.
Web site and all contents © Copyright David Huland 2009, All rights reserved.
Free website templates
|
|
