Hardware Setup
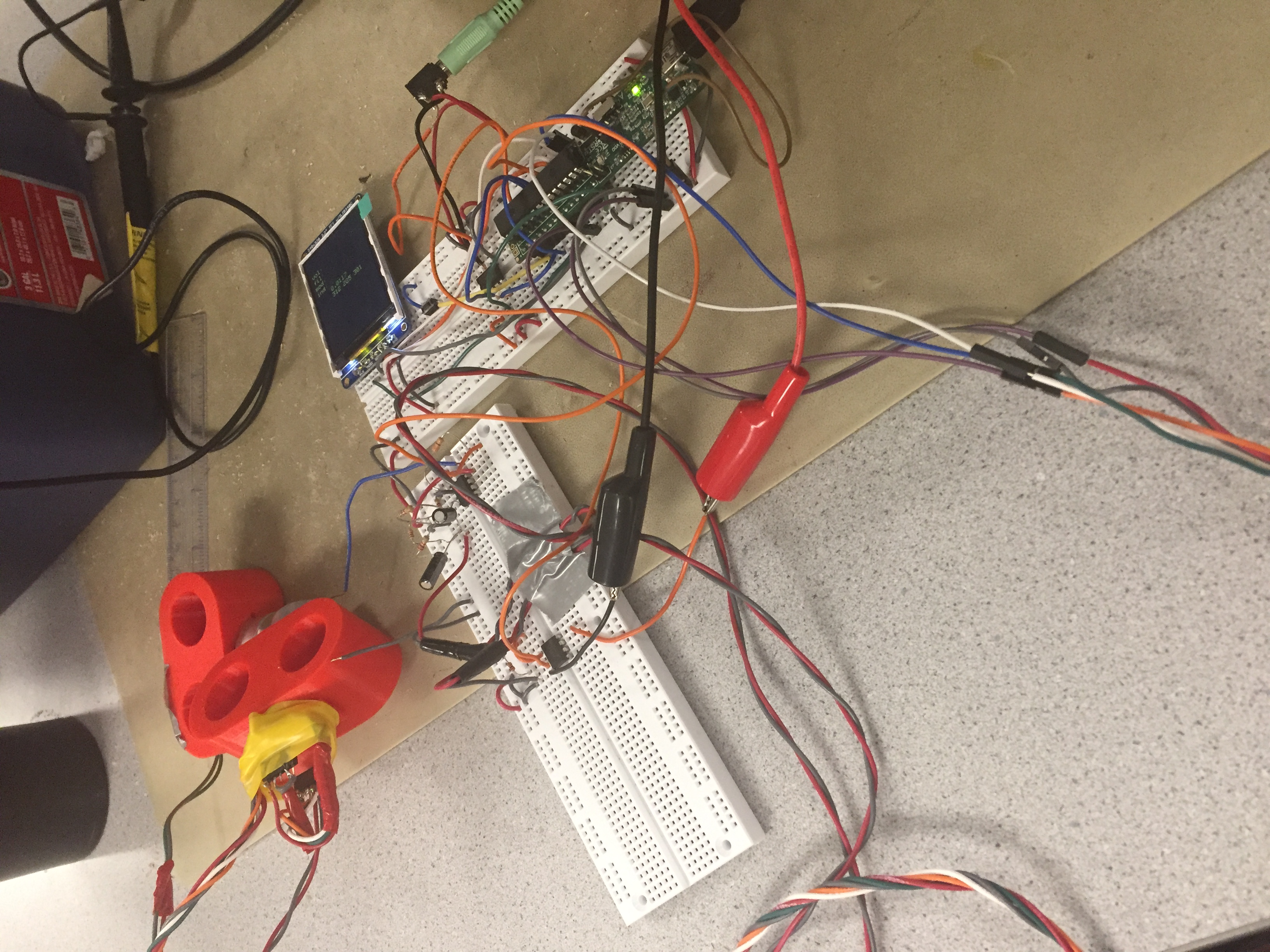
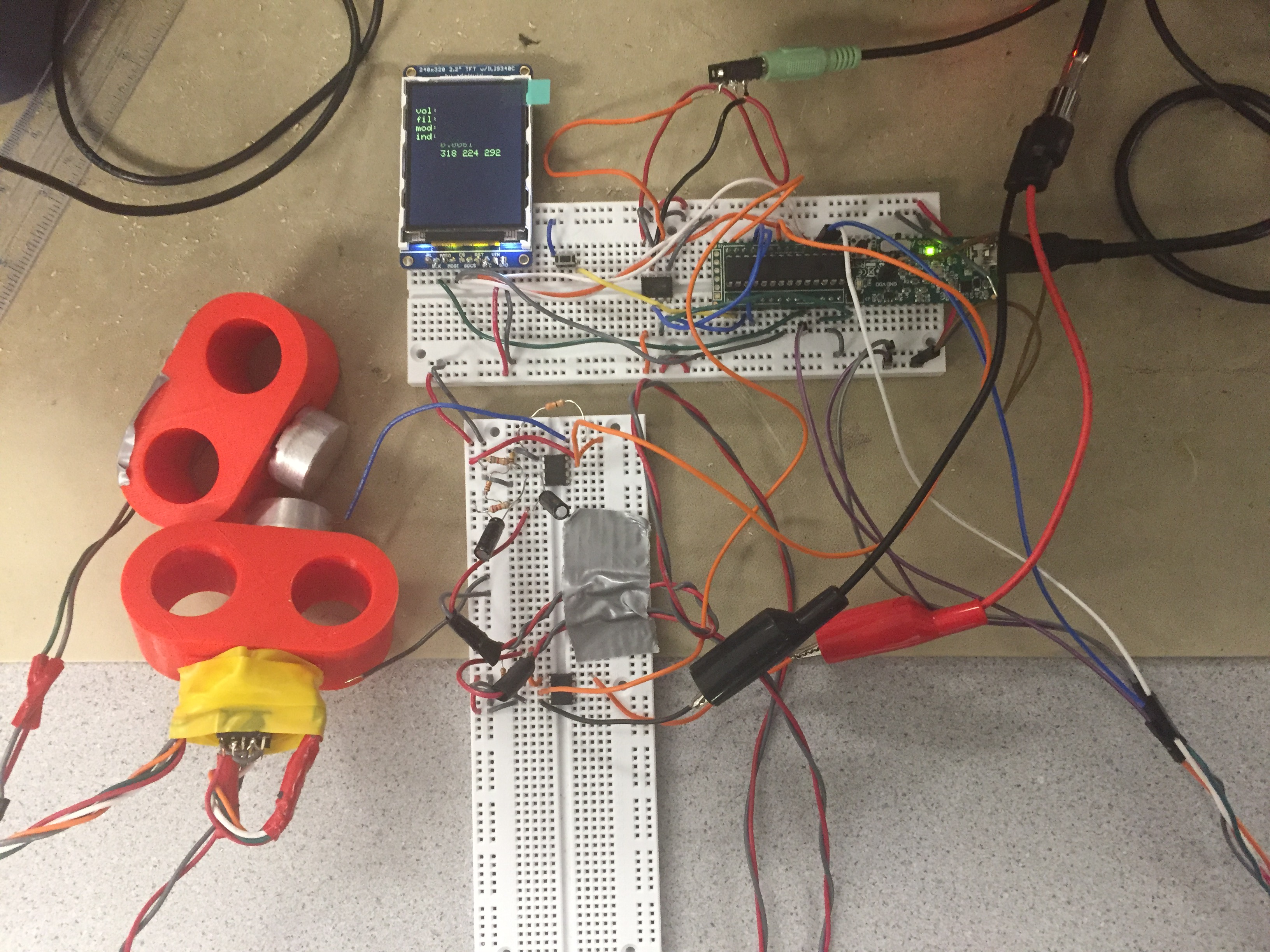
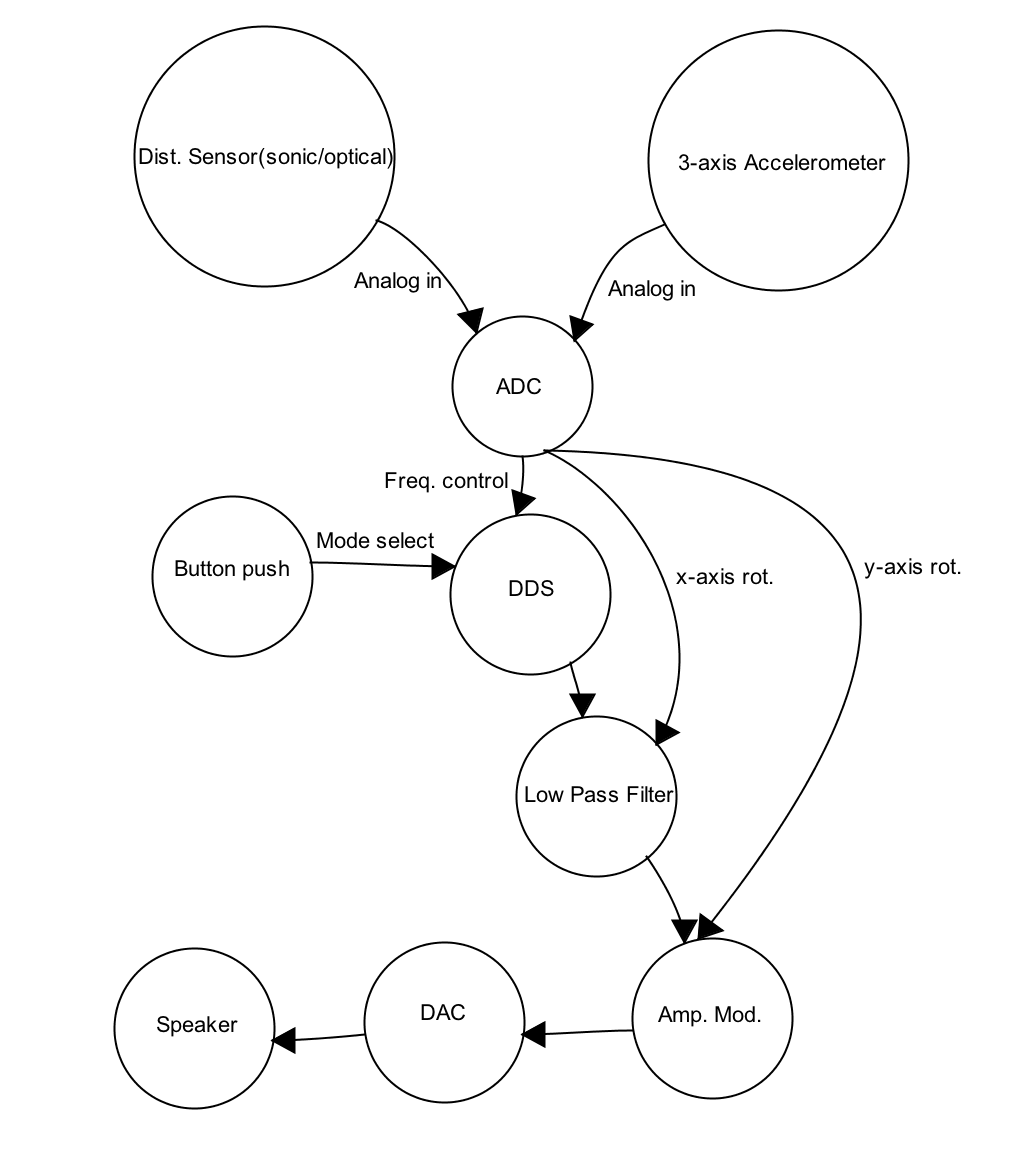
This project requires a good amount of hardware setup to achieve music playing. In order to detect the distance between user’s two hands, an ultrasonic transducer (Massa TR-89) is used on each hand; one is transmitting and the other one is receiving. A 3-axis analog accelerometer is used to get hand’s orientation because the gravity is always the same direction. We made a conscious decision to choose an analog accelerometer because the interface is more straightforward than a digital one and using ADC of the board is fairly simple. A DAC (MCP4822 from lab 2) is used to output the sound waves to a 3.5mm adapter.
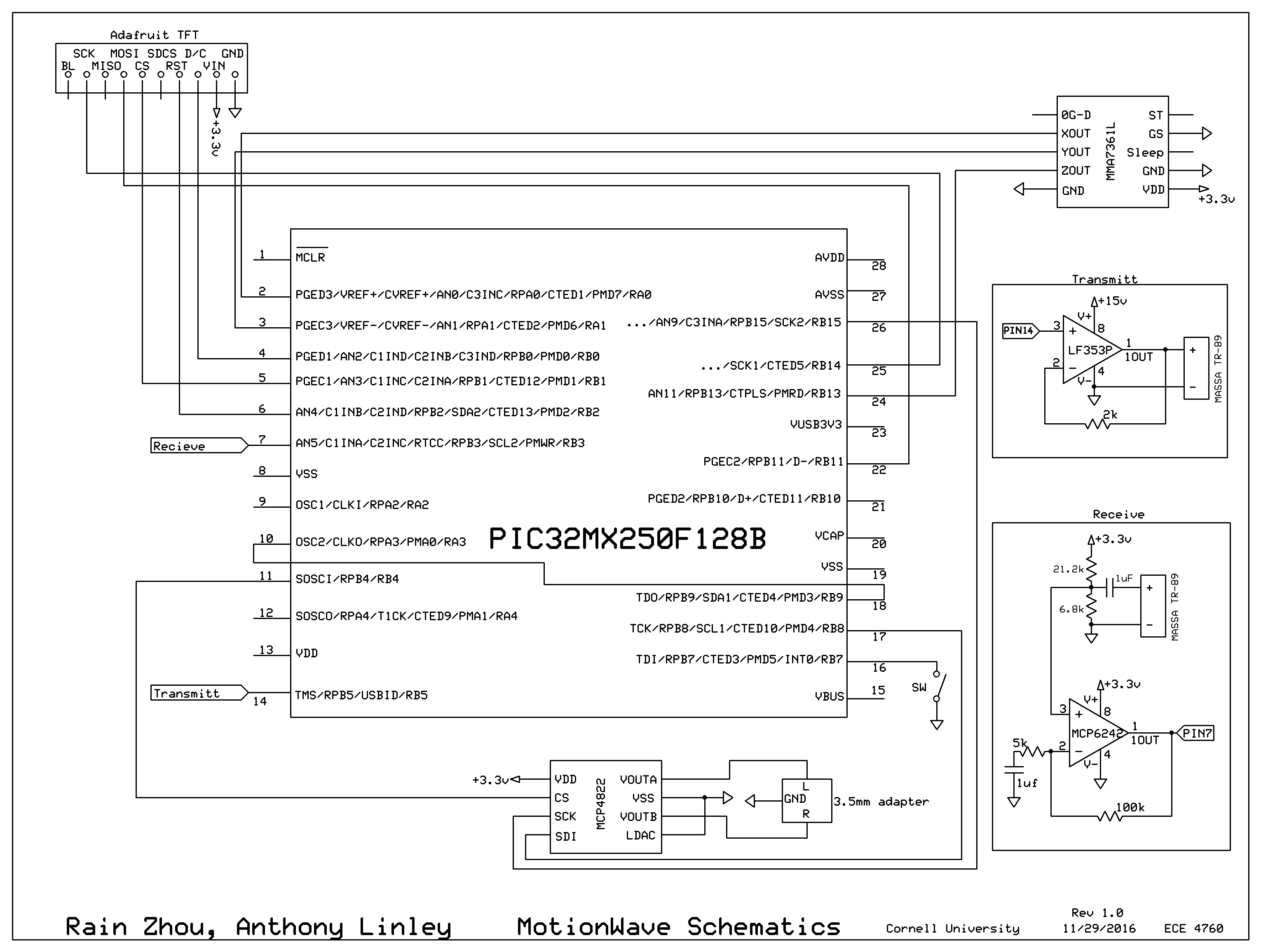
In this project, we decided to use Microstick II as our development platform for the PIC32 MCU, just like we did in all of the labs, because of simplicity and familiarity. As shown in the circuit schematics in the Appendices section, the main hardware that the PIC32 is interfacing is with the TFT LCD screen, MCP4822 DAC which connects to 3.5mm adapter, the accelerometer, transmitting module and the receiving module. Connection to the TFT LCD screen and the DAC is fairly straightforward and just like the previous labs. MCP4822 DAC uses SPI clock 2 (Pin 26) and has both A and B output channels connected to the 3.5mm adapter. However, the sound output is monophonic and A and B channel output the same wave. For distance detection, we need throw an interrupt when the receiving voltage is above certain threshold. Since we are using the Vref internal comparator, we need to connect pin 10 with pin 18.
Accelerometer
MMA7361L is a low power, 3-axis analog accelerometer featuring a 1-pole lowpass filter, self-test, 0-gee detect and some other features. MMA7361L can share the same VDD as the PIC32 (+3.3V) and has two modes: +/-1.5 gee and +/- 6 gee. Since we are only sensing gravity, we select +/-1.5 gee mode to have as much resolution as we can. To do so, we have to ground the GS pin. We can leave 0G-D, ST, and Sleep pin unconnected. XOUT, YOUT, ZOUT are the analog output pins and are connected to PIC32’s AN pins, specifically pin 2, pin 3, and pin 24.
Transmitting module
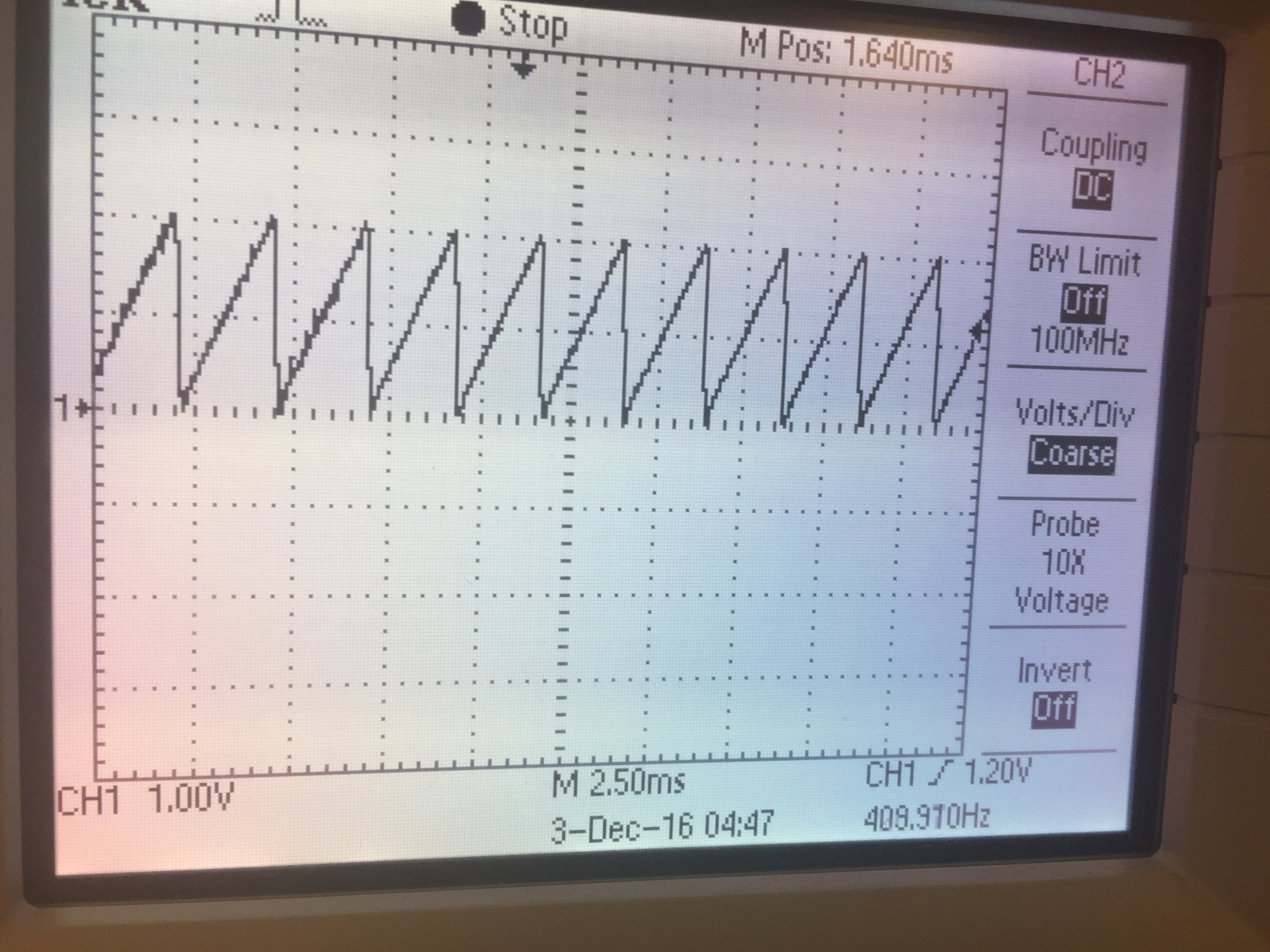
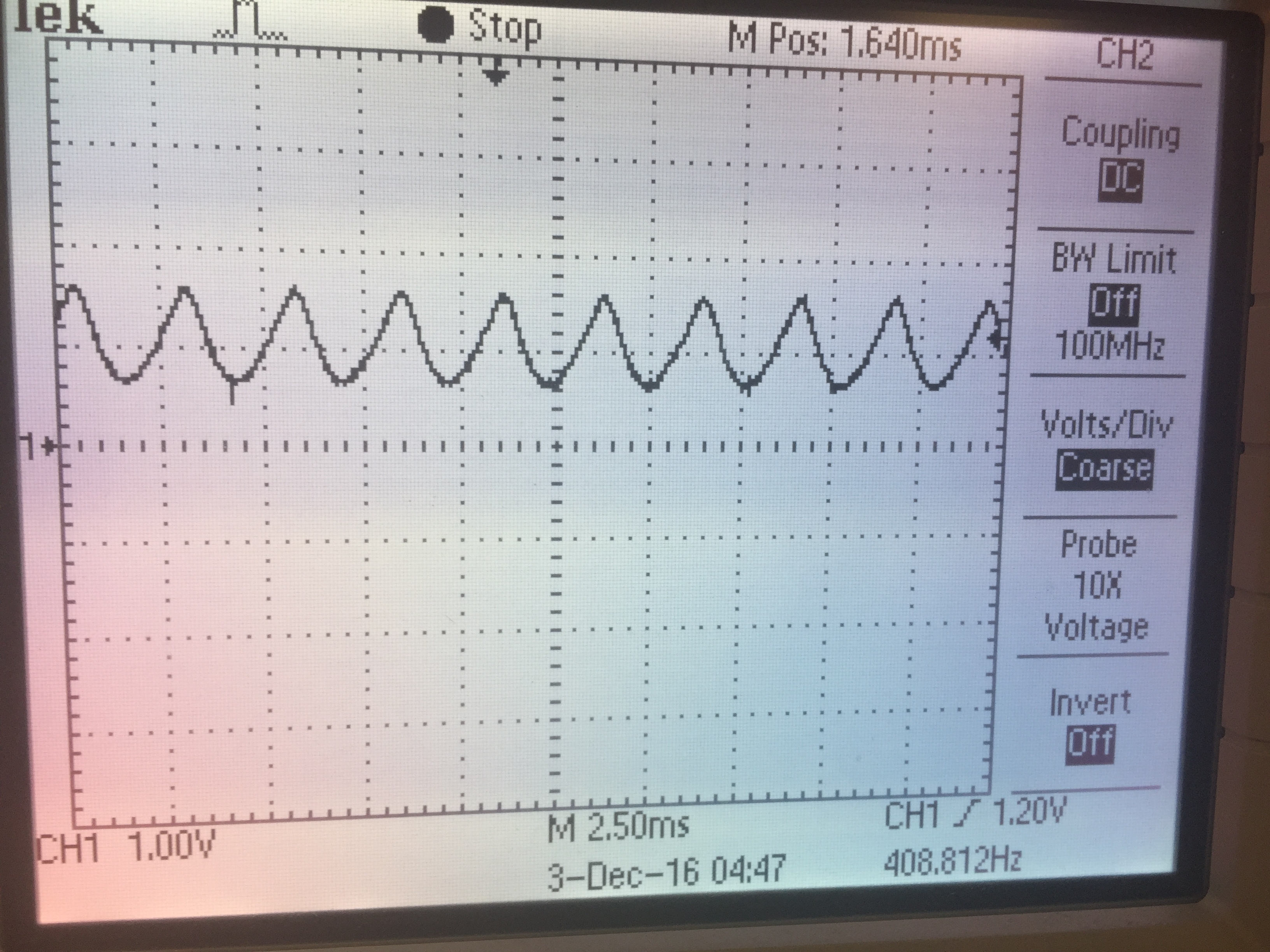
Massa TR-89 is a very cheap analog ultrasonic transducer and it just has a + and a - pin. The voltage of the PIC32 is not enough drive the transducer loud enough. Through experimenting, we found out that 15V of PWM works very well for our application (distance sensing between 0 - 1.5m). We connect the PWM output (pin 14) to the positive port of LF353. LF353 is a wide-bandwidth op amp from TI and can use voltage up to 18V. We originally wanted to create a non-inverting op-amp of gain of 5:1; however, accidentally, we got 0-15V PWM output from a unity gain buffer setup. We simply cannot explain the reasoning, but with 3.3V PWM input, we were able to get 15V PWM output at the same frequency.
Receiving module
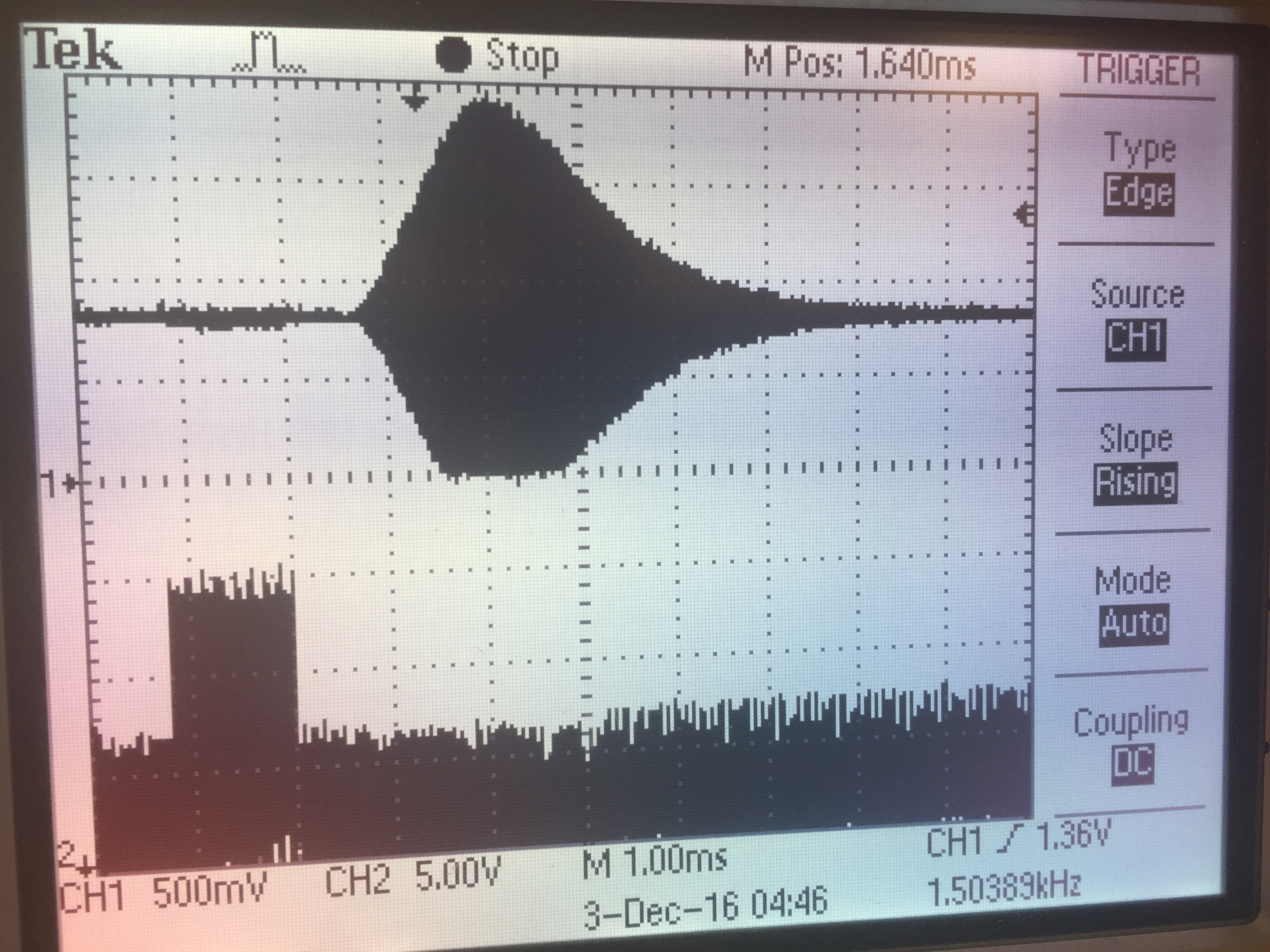
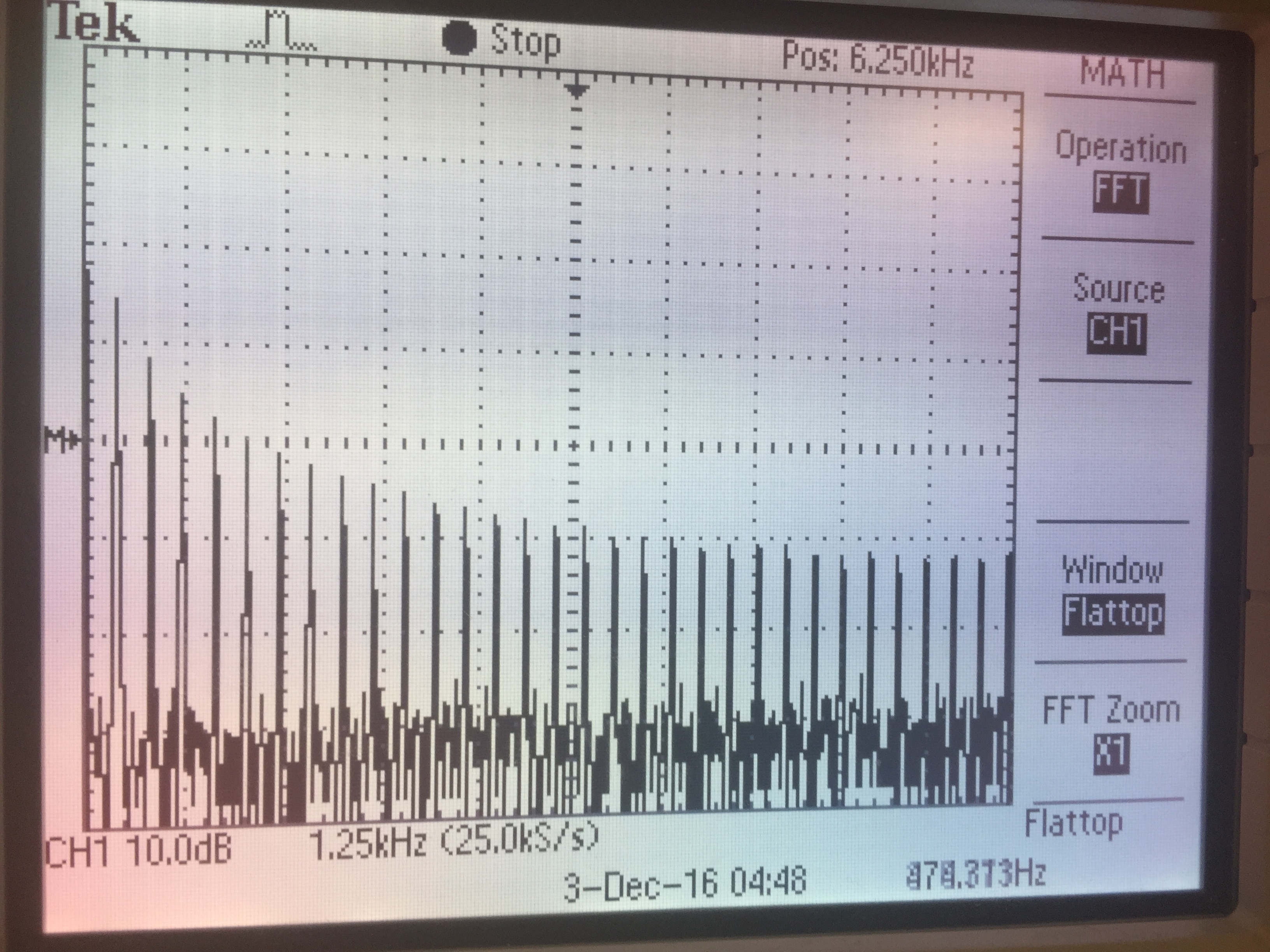
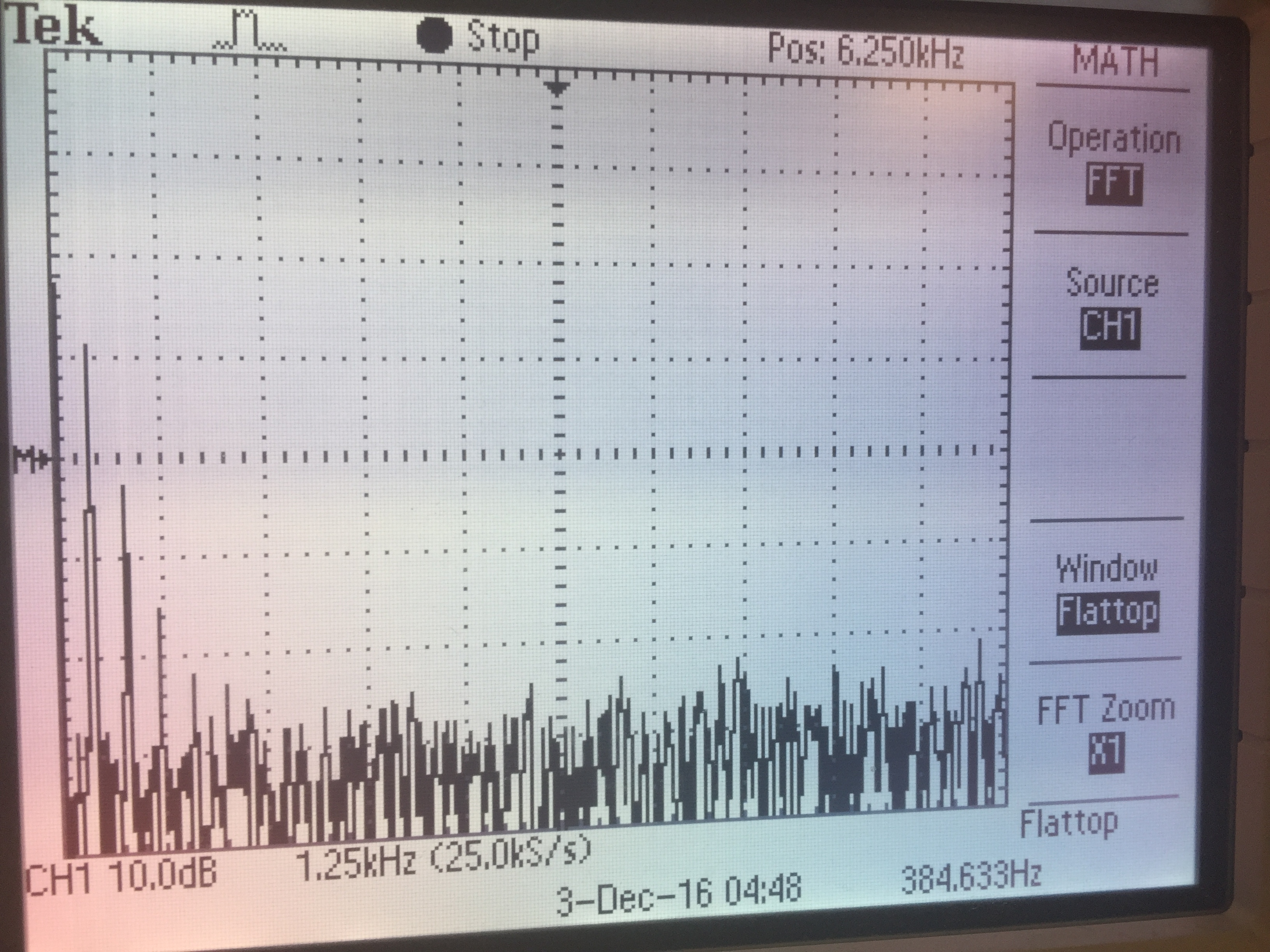
The receiving transducer produces a set of growing and then decaying oscillations. The really good way to process this signal is to invert the negative waves and low-pass the signal so that we get a smooth growing and decaying voltage instead of a bunch of sine waves. However, since we turn the comparator off after the first trigger until the next set of waves, it was not necessary for us to process the input signal. However, we do need to amplify it.
We connect the positive pin of the transducer to a voltage divider to offset the voltage so that when there’s no input, the voltage hovers around 0.8V, and the input signal can trigger the 1.2V internal comparator. If we have the neutral voltage any higher, the noise can actually trigger the comparator erroneously. The signal then is connected to the positive port of MCP6242, a low-bandwidth op amp (from lab 4). Non-inverting amplifier is implemented with the intended gain of 20:1. However, the bandwidth of MCP6242 is only good up to 550 kHz, so the realistic gain we are getting is about 10:1. The output of the op amp is then fed back to pin 7 of the PIC32.