| | |
| |
| |
| |
| |
|| |
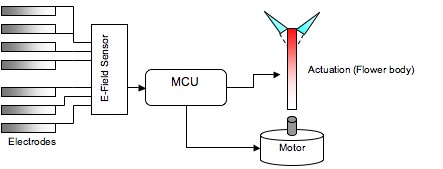
high-level design rationale We wanted to create an interactive robotic toy that would be smart, engaging as well as aesthetically pleasing. The Robotic Life group at MIT Media Lab had previously created several robotic flowers (Cyber flora) and this was the source of our project idea. Thus, our goal was to design our own robotic flower that could interact with humans and provide some amusement for all. design overview There are three main units of operation: a proximity detection unit, actuation unit and motor unit. All three units were integrated and controlled by a single microcontroller (MCU). The proximity-sensing unit is based on non-contact capacitance sensing. An electric field imaging device was used to create electric fields by connecting external electrodes to the device and detect objects in that electric field. Several electrodes were used to detect proximity as well as position of the human hand. When the human hand approaches the flower, the electric field is disturbed and the device sends a voltage signal to the MCU via the analog-to-digital converter (ADC). Fig. 1below shows the overall flow diagram.
Upon detection of a significant change in voltage levels, the actuation unit is then activated. By using nitinol, a shape memory alloy also known as "muscle wires", we developed a flower that could open its petals by extending nitinol actuators when a current was flown through the actuator. Finally, the flower orients itself toward the human hand based on the strongest signal from one of the electrodes. A two phase, bipolar stepper motor was used to rotate the flower, enabling it to face a wide range of directions. The entire design and setup is discussed in more detail in the hardware and software section. While the MIT Media Lab inspired our project, our design and construction of the Kasubana robotic flower was completely original. Similarly, we wrote our own software and did not use code from other sources. As far as we are concerned, there are no IEEE, ISO or ANSI standards that are relevant to our project.
Developed by Ming-Zher Poh & Yuk Kee Cheung, © 2005
|
|||
|