| # ( High Level Design
) |
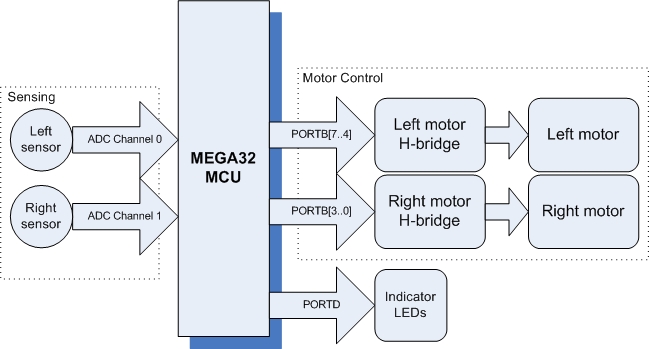 |
| Fig
HL-1: High level diagram |
| The robot is
designed with two sensors in mind, a left and a right. So when more light is
detected on the left side, the robot will move towards it by rotating the right
motor forward and the left motor backwards. The robot will know to move forward
when both sensors receieve about the same (by a margin we specify) amount of
light. |
| Left sensor |
Right sensor |
Left motor |
Right motor |
Effect |
| 0 |
0 |
No signal |
No signal |
No movement |
| 0 |
1 |
Step forward |
Step backward |
Right turn |
| 1 |
0 |
Step backward |
Step forward |
Left turn |
| 1 |
1 |
Step forward |
Step forward |
Foward movement | | |
Fig
HL-2: Controls table
|
| # ( Standards )
|
| We are currently unaware of
any relevant standards to this project. The robot is only designed to respond
to visible light. |

