| # ( Introduction )
|
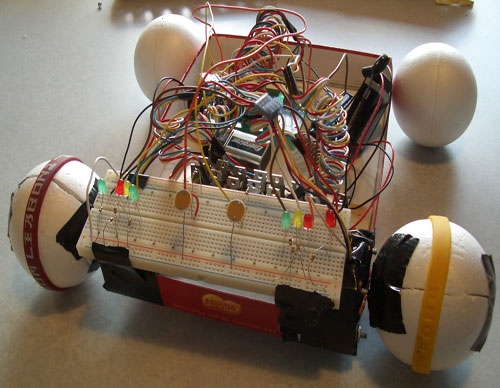
| LightRover is a
robot that can sense and follow light. A user can shine a flashlight at its
front and LightRover will respond by following the light source. Its speed is
dependent upon the intensity of the light detected. LightRover uses a
microcontroller for processing the sensor readings and responds by controlling
the motors. |
 |
| # ( Rationale/Motivation
)
|
| We wanted to
build a light sensing robot because microcontrollers are natural devices for
sensing and responding to events. We felt that building a device able to react
to its environment would be an excellent learning experience. |
 |
| Video
(AVI): LightRover in action |

