Design
High Level Design
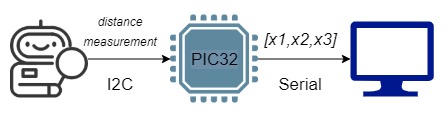
The Spy Robot’s main purpose is to be used as a surveillance system using a time-of-flight (TOF) sensor. We wanted to create a real-time LIDAR-like graph that showed a top view of the room. This task was made more interesting given we had never actually been in that room during this semester. The TOF sensor, mounted on a miniature robot controlled by SG90 servo motors, collects distance data by scanning the room bidirectionally and sends it to the PIC32 via I2C, then the PIC processes this data and sends it to the lab PC via serial communication. The PIC32 is responsible for controlling the scanning pace of the robot, collecting the data in an array, and sending the array to the lab PC. This scanning data is processed in a Python script that generates a polar coordinate graph of the room.
Due to the modularity of this project, we needed to make trade-offs at every step to ensure an optimal operation of the Spy Robot. We chose the TOF sensor specifically because of its performance accuracy and rapid communication via I2C, for a great price. Thus, we ensured an optimal performance from our peripheral device. The bottleneck came from how fast we could plot data. Due to the time constraints and difficulty debugging in a remote environment, we began by building a generalizable model that could be improved relatively easily. This included plotting an array of values at once, updating our graph with each sweep of the room, rather than real-time plotting several points. This is because real-time plotting would have required sending an escape character, or an encoded message from the PIC to signal the start and direction of a new sweep. We have real-time serial data plotting code worked out, but integrating it with the sensor data was beyond the scope of our project. Another reason we chose to plot arrays corresponding to each sweep is because this is a much more accessible way to start creating a 3D map. Adding the capacity to move the robot’s head vertically could be done fairly easily given how we have set up our code. One of the biggest challenges in engineering is to build something useful that will withstand the test of time. This was our mentality with our design decisions, and guided a lot of our hardware/software trade-offs. We wanted to ensure that this could be useful to us later, or to others in the future.
As stated previously, our project loosely resembles the concept of IoT home surveillance technology. One great example of this technology is Ring. Ring is a product that allows users to see who is at their door through a video camera so they can see who is there even if they are not home. This device is activated by motion detection. Even though it can record video for a long duration of time, it only notifies the user when there is a potential person at the door. Our project is similar in the sense that it remotely detects intruder detection, but it does not provide notifications or video like Ring. In that way, it mimics radar as used for submarines in that it shows the environment including changes in that environment.