Hardware
Hardware Setup
Due to the remote nature of the course this semester, we tried to keep minimal hardware setup. This is why we thought the Sparkfun Distance Sensor would be a good choice - a lot of the setup is already done for us with this integrated board. We also intend to extend the Lab 4 hardware setup with the servos, so this setup is both simple and familiar. The only new interface we would have to set up is I2C which is unfortunately hardware setup as the only interface on the breakout board. Our SPI connections for data transmission are the most involved, and most important, part of the hardware setup, so we have carefully detailed these in an Altium Schematic. The sensor and microcontroller connections are shown below, and the full schematic can be found in the Appendix.
HW/SW Tradeoff
Although we all love working with hardware, the remote working environment constrained the amount of hardware work we could do. Our final design mounted the distance sensor on the servo assembly from lab 4 (with googly eyes included of course). Still wanting to incorporate hardware into our project, we leveraged the work from previous labs to limit the amount of setup required by the course staff. Additionally, this limited the amount of hardware debugging we would have to do, which is very difficult to do remotely.
Sensor Selection
We surveyed many potential sensors before landing on this one. We started with the HC-SR04 ultrasonic sensor as the go to arduino range sensor. After looking at the specifications more closely however, we decided to broaden our search and look for a sensor that was more reliable and precise. We were also interested in working with LIDAR but those state of the art sensors get quite large and expensive. Searching on sparkfun and adafruit for arduino compatible sensors (because we knew they would be compatible with the PIC32 and have existing infrastructure to work with) and found several good options. We eventually settled on the VL53L1X infrared time of flight (TOF) sensor from STMicrocontrollers that was setup on a sparkfun breakout board. This sensor has a fantastic range of 4m and millimeter precision for only $20. These specifications allowed us to sweep our radar sensor across the room and measure small changes in the environment. The relatively cheap price enabled us to purchase a second sensor for debugging in our remote work environment, which proved very useful at solving certain issues.
The sensor works by pulsing an infrared laser and clocking the “time of flight” of the laser to return to the sensor with a SPAD array.
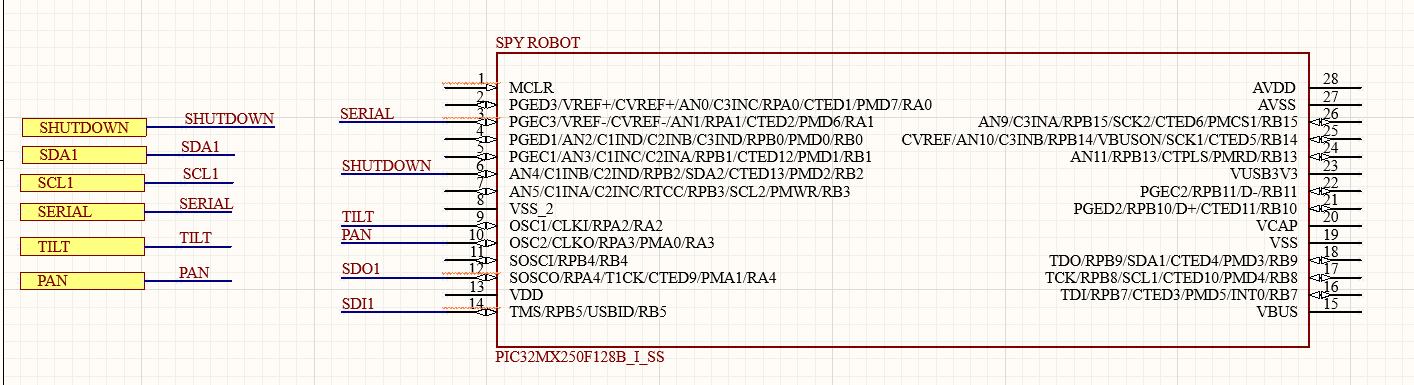
Microcontroller Schematic
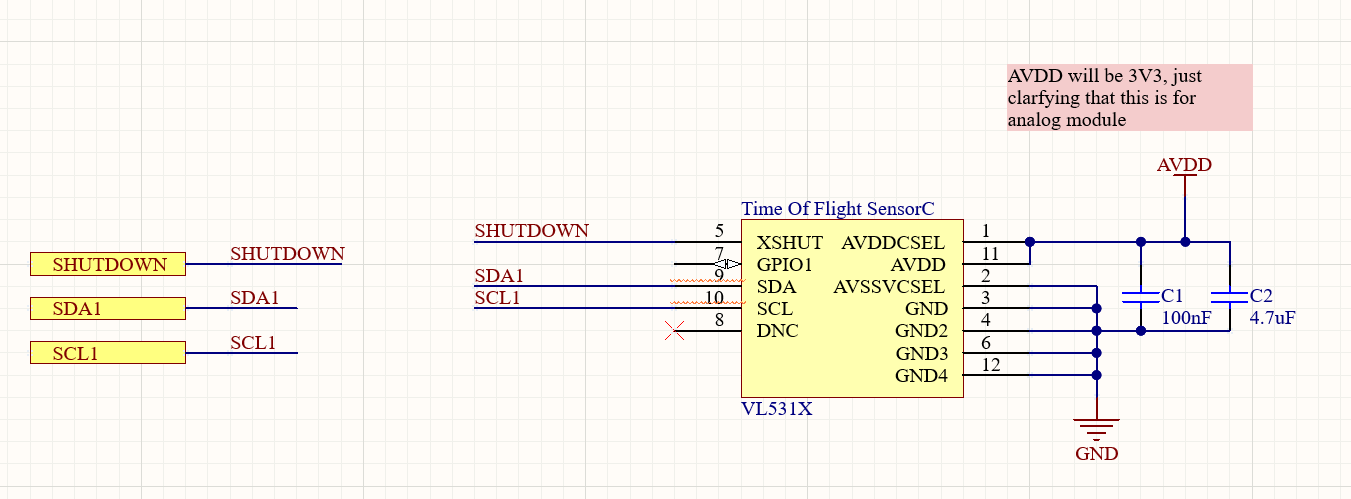
Sensor Schematic
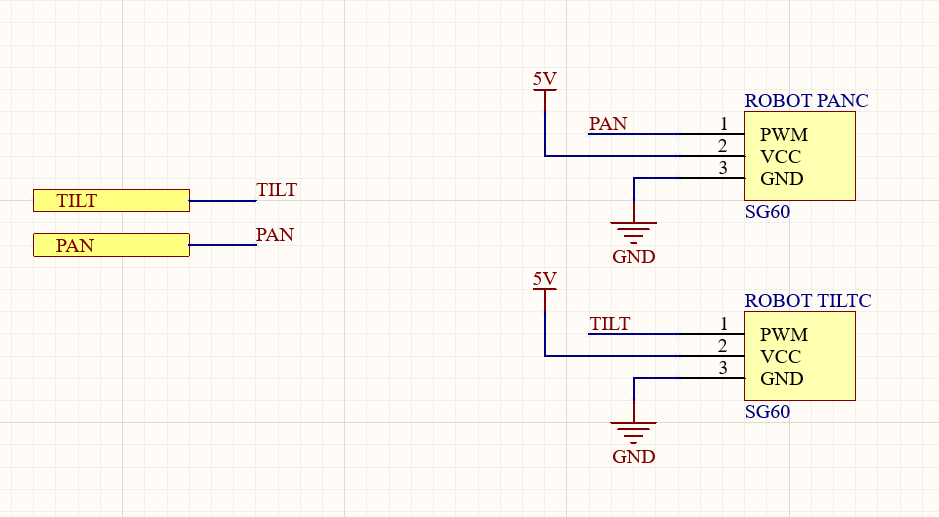
Servo Schematic