General utilities and information relevant to ece4760 at Cornell.
- Programming the chip from VScode by Adding program/reset button or using openOCD
No more cycling the USB power!
- Debugging hints
Errata, build errors, runtime errors, exceptions
- Startup Message with compile information (SDK 2.1)
Several C environment variables are parsed and printed.
Information includes C file name, compile time/date, C SDK version, and target board name.
All examples and student code are written using the Protohreads framework for multitasking.
- Protothreads 1.4 (SDK 2.1 or higher) for rp2040 and rp2350
Five simple examples showing how to use Protothreads 1.4 with explaination.
This version uses the SDK 2.1 mutex and semaphore implementations for core-safe
communication between threads. It is NOT backwards compatable in those constructs.
It has been tested on the rp2040 and on the rp2350 to 300 MHz.
please report bugs to Bruce.
- Protothreads 1.3 (SDK 1.5) mod for rp2040 and rp2350 by Bruce (used 2024-2025)
A port to the rp2040/2350, extended for two cores with support for hardware locks, core-safe semaphores, and core-to-core hardware FIFOs.
Protothreads provides a simple, cooperative, thread environment with very fast context switch and low memory overhead.
Modified thread dispatcher implements priority scheduling in addition the default round-robin.- Three simple protothreads 1.3 examples. (and a couple of more advanced examples)
One blinky thread on one core; two threads on one core, three threads on two cores, with signaling.
Advanced examples: spawning a thread, locking a variable, priority scheduler.
- Three simple protothreads 1.3 examples. (and a couple of more advanced examples)
- (depricated) Protothreads 1.1.2 used 2022-23
Graphics input and output using 640x480 VGA, possibly with optional joystick or encoder wheel.
A mouse interface is also shown in the USB section.
The serial interface is not really graphics, but plays around with color and formatting.
- VGA 16 color 640x480 Version 3 (Protothreads 1.4, SDK 2.2, designed for rp2350)
This version has a modified memory model to allow double buffering. It will work with the rp2040,
but can only double buffer on the rp2350. There is also 10x faster text drawing and circle filling .
a filled triangle primitive, a polyline psrimitive, and routines to handle the two buffers.
. - VGA 16-color 640x480 Version 2 (works with 2040 and 2350: LWIP compatable, protothreads 1.4, SDK 2.1.1)
Adding classic IBM VGA-437 font, and boldface for the 5x7 font.
An extension of Hunter's PIO VGA driver from 3-bit color to 4 bit color, with Protothreads.
Two bits of green allows more shades of blue and red, and adds orange.
- VGA 16 640x480 3D perspective polygon render. (SDK 2.0, rp2350 version and SDK 2.1 with vga16_version2)
The rp2350 version can render many more polygons than the 2040 (see below).
To demo this, a larger parametric surface is rendered with 400 triangles.
3D polygons are rendered in perspective by full 4D matrix transforms.

VGA 16-color 640x480 3D Polygon Perspective viewer. (SDK 1.50, rp2040 version)
3D polygons rendered in perspective by full 4D matrix transfroms.
- VGA 256 color 319x240. (LWIP compatable, SDK 1.5, protothreads 1.3, PIO bug fix)
An extension of Hunter's PIO VGA driver for 8 bit color.
Three bits of green, three bits of red, and two bits of blue.
- Serial command interface
Modern serial terminal emulators can produce a good looking user interface.
PuTTY emulates VT100 control code for color, cursor control, and limited
graphics
- Joystick and encoder wheel with VGA
A simple analog joystick with select button, and a digital encoder wheel with direction and selector buttons. - Mouse controlled graphics.
See USB HID examples below.
.jpg){kind=link}
Everyone needs more memory. FRAM works well for simple files with bandwidth requirments below about 1.5 Mbyte/sec.
SD card with FatFS has a larger program size overhead, but is compatable with PC read/write of huge files.
USB FLASH drives are exzplained the the USB MSC example below.
- FRAM memory for PICO.
Nonvolitile FRAM to add 0.5 MB of serial RAM.
- SD card with FatFS updated for SDK 2.2, and rp2350 with FatFS 3.7.0
MicroSD card support with PC-compatable file system
(older obsolete version for rp2040)
- strong>USB mass store MSC (see USB section below)
LWIP is the supported TCP/IP stack for the PicoW.
LWIP has lots of options and somewhat limited documentation.
This section has lots of examples to exercise some of the options.
Opotions include bringing up the PicoW as an WIFI access point or WIFI station and
data transfer by UDP or TCP.
- WIFI setup.
The physical considerations and software necessary for WIFI.
- TCP protocol
- rp2350 AP/HTML server with FatFS file server and writer (SDK 2.2, vga16, protothreads 1.4, FatFS 3.7.0)
This version has dynamically generated web pages for realtime control and can read static web pages
served from a file system. In addition it can generate an html file , then serve it to plot realtime data as
an SVG graphic.
- rp2350 AP/HTML server with FatFS (SDK 2.2, vga16, protothreads 1.4, FatFS 3.7.0)
This version has dynamically generated web pages for realtime control and static web pages
served from a file system.
- rp2350 AP/HTML server on pico2W to Browser as control/data display. (SDK 2.2, vga16, protothreads 1.4)
- rp2040 AP/HTML server on picoW to Browser as control/data display. (SDK 1.5, vga256, protothreads 1.1.2)
Using the rp2040 as an access point with web server allows a cellphone or
other web browser to act as a control panel for applications running on the rp2040.- (depricated) Browser as a control panel for rp2040. (version 2)
- (depricated) Standalone WIFI access point and web server (initial version)
This is an example from the C SDK repository that I used to understand more of LWIP.
- (depricated) Browser as a control panel for rp2040. (version 2)
- AP/HTTP server on picoW to client/viewer on picoW.
Use HTTP protocol to serve interactive, text, pages to another picoW.
The intent is a remote control panel and data display.
- rp2350 AP/HTML server with FatFS file server and writer (SDK 2.2, vga16, protothreads 1.4, FatFS 3.7.0)
- Network Time Protocol
- NTP and RTC clock using LWIP and vga16_v2 (SDK 2.1.1, protothreads 4, pico W)
The LWIP and VGA16 both use significant hardware. With care they are compatable and run at the same time.
The NTP can be used to automatically set the rp2040 RTC, perhaps daily, to maintain accuracy.
The Pico board clock oscillator is rated at ±30 ppm, or accuracy of 3x10-5.
Since there are 86400 seconds/day, this means up to 2.6 sec/day drift.
Daily setting seems reasonable, unless you need time accuracy better than one second.
This example does not work with rp2350 because the 2350 has no RTC. But see below for AON timer vesion.
- NTP and AON clock using LWIP and vga16_v2 (SDK 2.1.1, protothreads 4, pico2 W)
Like te example above, this uses NTP to set a local clock, in this case the AON timer.
I believe, but have not tested, that the AON SDK notices whether you are using pico or pico2
and correctly sets either the RTC on the 2040 or the AON on the 2350.
- (depricated) Network Time Protocol (NTP) and the onboard real-time clock (RTC)
- NTP and RTC clock using LWIP and vga16_v2 (SDK 2.1.1, protothreads 4, pico W)
- UDP protocol
- Symmetric send/receive between two picoWs (access point to station)
Each picoW can send or receive packets.
The code running on the two nodes is almost identical.
- Audio-rate UDP from picow to picow (access point to station)
Sending real-time data from picow to picow with no router involved.
- Data array UDP send/receive (station to station thru hotspot)
Sending an array of data allows performance testing as well as understanding of data sizes, and dealing with packet efficiency.
- UDP send/receive from desktop (station to station thru hotspot)
UDP protocol is a simple and fast, but does little error checking. It is therefore useful for data streams where a bad value is not a show stopper. You might send music but not code.
- UDP send/receive pico-to-pico. (station to station thru hotspot)
A simple scheme for figuring out IP addresses on the fly allows two picos to send data to each other.
- Symmetric send/receive between two picoWs (access point to station)
USB uses the tinyUSB implementation and is fairly big.
There are lots of ways to use it. Examples are your friend.
- USB HID host with mouse and keyboard
Connecting a mouse and keyboard with video display of results.
- USB host with HID and MSC
USB flash drive, Keyboard, mouse
These may have little general appeal, although the DMA computing machine could be a co-proessor.
- DMA computing machine.
The DMA subsystem is capable of running a compute-universal system.
This implementation uses three channels for fetch/execute, and a list of DMA control blocks as a program.
- Random number generation.
Using the ROSC to make reasonable quality random numbers. Routines for integers, fixed-point uniform and normal distributions, and for single bits.
Note that this page may be obsolete with the addition of TRG routines in C SDK 2.1.1,
BUT the DMA based TRG here is very fast.
- 16-bit floating point,
with similar bit layout to the IEEE standard FP16, but without infinities or NANs.
The reason for doing this annoying exercise is to see if ODE solvers run faster in limited precision floating point than in fixed point.
The 16-bit floats have a dynamic range similar to s15x16 fixed point, but are not faster then standard 32-bit floats.
The rp2350 has hardware floating point instructions, as well as an improved integer multiplier and divider.
The integer multiplier now produces a full 64 bit result from a 32x32 multiply. This speeds up the fixed point multiply by about a factor of 5. The page includes some test programs attempt to estimate the speed of the operations.
Video below compares float to fix for Mandelbrot set.
More numerical flogging of the M0 and M33 architecture, with an emphisis on speed using 16-bit fixed point.
The IIR and FIR sections use design implementations which run completely in C on the the M0, at the
cost some slightly non-optimal designs.
- Sliding window Fourier Transform
Less efficient than an FFT, but low latency, controllable frequency resolution, arbitrary frequency intervals.- Sliding Windowed Infinite Fourier Transform (SWIFT) and alpha-SWIFT
A per-sample Fourier transform with very flexible frequency and time resolution.
(floating point on rp2350)
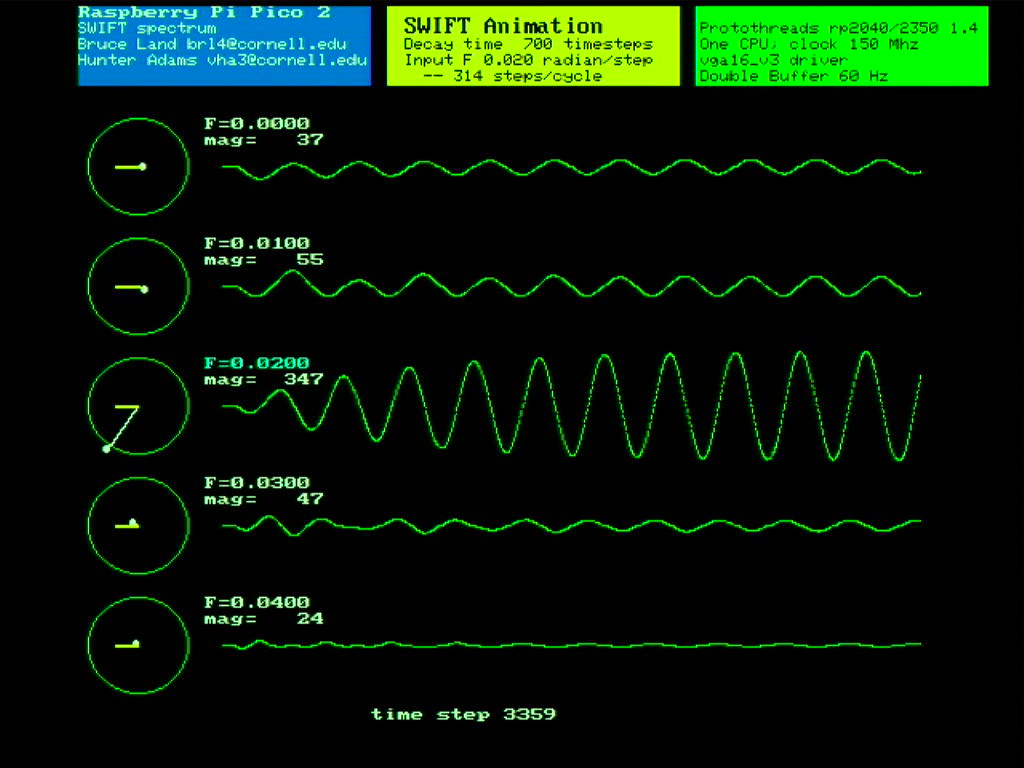
- Sliding Windowed Infinite Fourier Transform (SWIFT) and alpha-SWIFT
- FFT
- Overlapped FFT with overlapped iFFT to reconstruct input signal
This a loop-back example to show that it is possible to do framed signal
processing without too much frame discontinuity between frames.
(s1x14 fixed point on rp2350) - FFT and FilterBank spectrograms
FFT compared to lower resolution MEL spectrum for speech input. - FFT Spectrogram
Plotting the power spectrum, log power spectrum, and spectrogram of voice signals.
The spectrogram actually has enough info to decode what is being said.
- Overlapped FFT with overlapped iFFT to reconstruct input signal
- IIR and FIR filters
- IIR filter designer
Using s1x14 fixed point format. Lowpass, bandpass, and highpass filters design.
Plots the Bode plot of the designed filter, and allows the new filter to be used in realtime for audio input.
(rp2040). - FIR filter designer
Using s1x14 fixed point format. Lowpass, bandpass, and highpass filters design.
Plots the Bode plot of the designed filter, and allows the new filter to be used in realtime for audio input.
Also a version for linear frequency plots. (rp2040). - Speech compression/playback from IIR filterbank.
Speech sampled at 12.8 Ksample/sec is sent through 32 MEL-distibuted IIR filters.
The filter powers are sampled every 20 mSec and used to reconstruct speech using DDS.
(rp2040). - FFT and FilterBank spectrograms
FFT compared to lower resolution MEL spectrum for speech input. - IIR development
IIR filters in fixed point s7x24 format. Butterworth lowpass and bandpass filter.
- IIR filter designer
Since we can do DSP, can we use it to make sounds we might actually want to listen to.
FM synthesis is very 1970's synth kind of sound.
The Karplus-Strong algorithm actually solves the wave equation on a stirng in realtime to make
physically reasonable stringed instrument sounds.
- FM synthesis of sounds.
Some FM synthesis even sounds like music.
Widely used in the 1970's, '80s, and even into the 90's. for music and sound effects.
- Karplus-Strong strings
Plucked and bowed string physical synthesis.
An approximation of the actual PDE of a string. (fixed point on rp2040)
- String instrument synthesis by Karplus-Strong Algorithm
A cheap way to solve the linear wave equation on a string fast enough for
real-time sound synthesis (floating point on rp2350)
- String synthesis by brute-force wave equation solution.
Finite difference solution of wave equation. (floating point rp2350 only! Too slooow on rp2040)
- Gravitational system in floating point on rp2350.
Gravity is a long-range force, so the force computations are O(n2) in the
simplest implementation get big quickly. The example animates 150 gravitating particles
at about 140 frames/sec or 300 at 30 frames/sec. (floating point on rp2350 only)
- Lattice-Boltzmann fluid flow simulation fixed point on rp2040
A strange hybrid of finite difference and cellular automaton using fixed point arithmetic for speed.
The fixed point system used is s1x25. The shorter, and faster, 16-bit fixed point did not have enough precision for stable solutions.
- Lattice-Boltzmann fluid flow simulation floating and fixed point on rp2350
See the Arithmetic page for details. Fixed (top) and float videos are below.
Fixed point is about twice as fast as hardware floating point.
<
- 2D Laplace/Poisson solver in floating point for rp2350
This solver produces the voltage field in a region including conductors at fixed voltage and insulators.
- Expanding analog or digital input/output.
There are never enough pins. But there are alternatives.
- Using Verilog to understand the rp2040 PIO processors. The Pi rp2040 microcontroller has 8, single cycle, deterministic, Programmable i/o blocks (PIO). Each PIO is programmed using a 9-instruction assembly language. We have been speculationg about how you make a single-cycle machine (including jump). This project attemptes to answer that, without implementing the entire PIO architercture.
- rp2040 PIO control
Experiments to see if modifing the code of a running PIO channel is feasable.
- Implementing a input capture ability.
To emulate the precise time stamp feature found on AVR and PIC32
With two PIO state machines, you can get single cycle capture resolution.
- Weighted average of two audio signals using blend mode.
- Line generator for VGA using blend mode.
- Tone burst generator using clamp mode.
- DDS and FM waveform synthesis using interpolator peripherial and clamp mode.